






 本文介绍了如何将SE注意力机制融入不同版本的ResNet(如ResNet18、34、50、101和152),以提高深度学习模型的性能。通过全局平均池化和全连接层实现注意力机制,展示了在残差网络中集成该机制的方法及其潜在优势。
本文介绍了如何将SE注意力机制融入不同版本的ResNet(如ResNet18、34、50、101和152),以提高深度学习模型的性能。通过全局平均池化和全连接层实现注意力机制,展示了在残差网络中集成该机制的方法及其潜在优势。
残差网络ResNet和SE注意力机制自从被提出以后就得到了广泛的应用,在模型搭建过程中,有很多将两者进行结合使用的方法被提出,以是的模型具有更好的性能。
下面是将SE注意力机制应用在不同的ResNet残差网络中的方法。
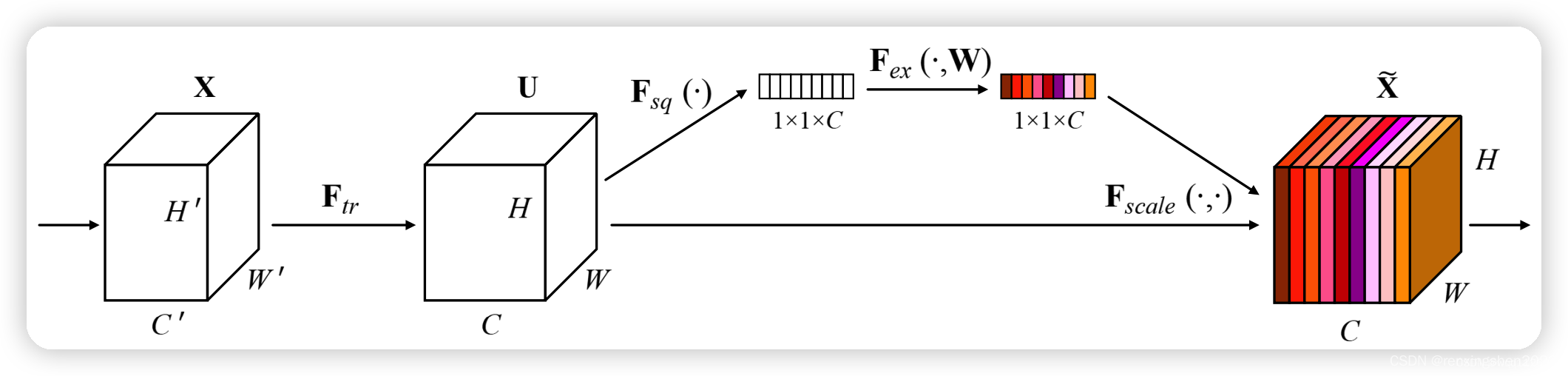
SE注意力机制模型图如下:
基本的残差单元:
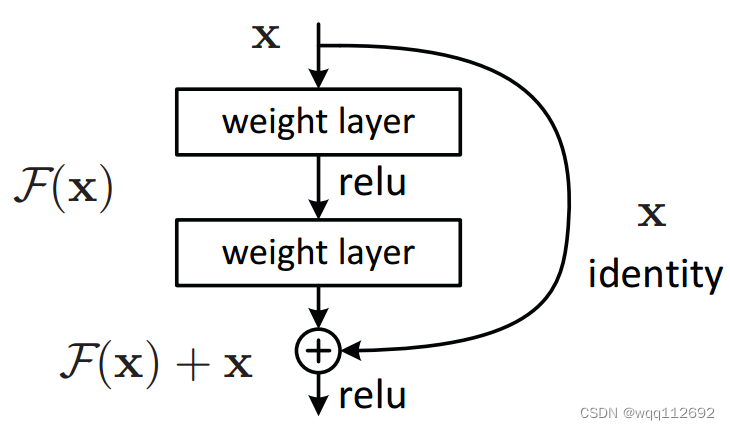
网络输入x,希望输出H(x)。加入残差连接之后,有H(x)=F(x)+x,网络就只需要学习输出一个残差F(x)=H(x)-x,学习残差F(x)=H(x)-x会比直接学习原始特征H(x)简单的多。
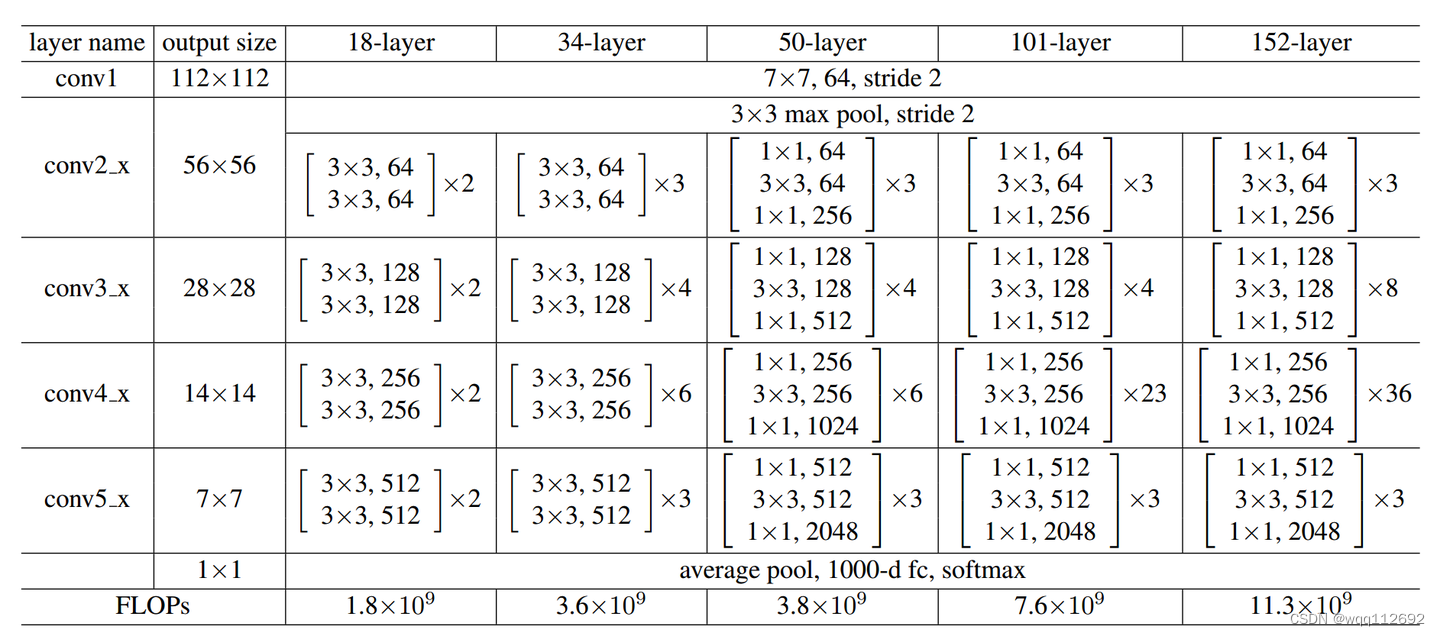
不同的ResNet基本组成:
1.SE注意力机制+ResNet18
import torch.nn as nn
import math
import torch.utils.model_zoo as model_zoo
__all__ = ['SENet', 'se_resnet_18', 'se_resnet_34', 'se_resnet_50', 'se_resnet_101',
'se_resnet_152']
def conv3x3(in_planes, out_planes, stride=1):
# 定义3x3卷积,并且填充数为1
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1 # 扩展倍数的属性
# 用于在 ResNet 中确定每个 BasicBlock 层的输入通道和输出通道之间的倍数关系。通过将输入通道数乘以 expansion,可以得到输出通道数
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride) # 3x3卷积
self.bn1 = nn.BatchNorm2d(planes) # 归一化
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes) # 3x3卷积
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample # 传入的下采样方法保存为一个属性
self.stride = stride # 步长
if planes == 64: # 输出特征图的通道数
self.globalAvgPool = nn.AvgPool2d(56, stride=1) # 全局平均池化
elif planes == 128:
self.globalAvgPool = nn.AvgPool2d(28, stride=1)
elif planes == 256:
self.globalAvgPool = nn.AvgPool2d(14, stride=1)
elif planes == 512:
self.globalAvgPool = nn.AvgPool2d(7, stride=1)
self.fc1 = nn.Linear(in_features=planes, out_features=round(planes / 16)) # 全连接
self.fc2 = nn.Linear(in_features=round(planes / 16), out_features=planes) # 全连接
self.sigmoid = nn.Sigmoid()
def forward(self, x):
residual = x
out = self.conv1(x) # 3x3conv,s=1
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out) # 3x3conv,s=0
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
original_out = out
out = self.globalAvgPool(out) # # 全局平均池化
out = out.view(out.size(0), -1)
# out.size(0) 表示第一个维度的大小保持不变,而 -1 表示在保持其他维度的前提下,自动调整第二个维度的大小
out = self.fc1(out)
out = self.relu(out)
out = self.fc2(out)
out = self.sigmoid(out)
out = out.view(out.size(0), out.size(1), 1, 1) # 新张量的形状为 (out.size(0), out.size(1), 1, 1)
out = out * original_out
out += residual # 残差连接
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4 # 扩展倍数的属性
# 用于在 ResNet 中确定每个 BasicBlock 层的输入通道和输出通道之间的倍数关系。通过将输入通道数乘以 expansion,可以得到输出通道数
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False) # 1x1conv
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, # 3x3conv
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False) # 1x1conv,输出通道是输入通道的4倍
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
if planes == 64:
self.globalAvgPool = nn.AvgPool2d(56, stride=1) # 平均池化
elif planes == 128:
self.globalAvgPool = nn.AvgPool2d(28, stride=1)
elif planes == 256:
self.globalAvgPool = nn.AvgPool2d(14, stride=1)
elif planes == 512:
self.globalAvgPool = nn.AvgPool2d(7, stride=1)
self.fc1 = nn.Linear(in_features=planes * 4, out_features=round(planes / 4)) # 除 4 取整
self.fc2 = nn.Linear(in_features=round(planes / 4), out_features=planes * 4)
self.sigmoid = nn.Sigmoid()
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
original_out = out
out = self.globalAvgPool(out)
out = out.view(out.size(0), -1)
out = self.fc1(out)
out = self.relu(out)
out = self.fc2(out)
out = self.sigmoid(out)
out = out.view(out.size(0),out.size(1),1,1)
out = out * original_out
out += residual
out = self.relu(out)
return out
class SENet(nn.Module):
# SE注意力机制
def __init__(self, block, layers, num_classes=2):
self.inplanes = 64
super(SENet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # 最大池化
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
# block:指定使用的基本块类型,可以是残差块或其他类型的块
# 64、128、256、512:指定每个卷积层组中的通道数(即输出特征图的通道数)
# layers[0]、layers[1]、layers[2]、layers[3]:指定每个卷积层组中的基本块数量
# stride=2:指定每个卷积层组中的卷积层的步长(stride),默认为 2
self.avgpool = nn.AvgPool2d(7, stride=1) # 平均池化
self.fc = nn.Linear(512 * block.expansion, num_classes) # 全连接
for m in self.modules(): # 遍历模型的所有子模块
if isinstance(m, nn.Conv2d): # 如果m模块时卷积模块
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels # 计算卷积核的参数个数 n
m.weight.data.normal_(0, math.sqrt(2. / n))
# 对卷积核的权重进行初始化。这里使用了正态分布来初始化权重,均值为 0,标准差为 math.sqrt(2. / n)。这种初始化方法可以帮助模型更好地收敛
elif isinstance(m, nn.BatchNorm2d): # 如果m模块是归一化模块
m.weight.data.fill_(1) # 归一化层的权重进行初始化,将所有权重设置为 1
m.bias.data.zero_() # 归一化层的偏移量进行初始化,将所有偏移量设置为 0
def _make_layer(self, block, planes, blocks, stride=1): # 用于创建一个层
# block是一个模型中的基本单元,planes是层中的通道数,blocks是层中重复的次数,stride是步长,默认值为1
downsample = None # 下采样层的目的是降低输出特征图的尺寸和增加通道数,以便将输入的特征图与输出的特征图进行匹配
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False), # 下采样快
nn.BatchNorm2d(planes * block.expansion), # 归一化
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
# block函数的目的是创建一个新的模块,该模块由一个卷积层和一个批归一化层组成,同时也可能包含一个下采样层
return nn.Sequential(*layers) # 构建了一个顺序网络容器,将 layers 列表中的模块组合在一起,并将其作为方法的返回值
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x) # 特征提取和降维
x = self.avgpool(x) # 将特征降维为一维
x = x.view(x.size(0), -1)
x = self.fc(x) # 全连接层进行分类
print(x.shape)
return x
def se_resnet_18(pretrained=False, **kwargs):
"""Constructs a ResNet-18 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
pretrained 表示是否使用在 ImageNet 数据集上预训练的模型
"""
# 使用了一个名为 SENet 的类来构建模型,同时也使用了 BasicBlock 类作为 ResNet 中的基本块
# [2, 2, 2, 2] 是一个列表,表示模型中每个阶段(stage)中重复 BasicBlock 的次数
model = SENet(BasicBlock, [2, 2, 2, 2], **kwargs) # 创建含有SE注意机制的残差模块
return model
2.SE注意力机制+ResNet34
只需要将SE注意力机制+ResNet18部分的代码中的def se_resnet_18部分换成如下即可:
def se_resnet_34(pretrained=False, **kwargs):
"""Constructs a ResNet-34 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
pretrained 表示是否使用在 ImageNet 数据集上预训练的模型
"""
# 使用了一个名为 SENet 的类来构建模型,同时也使用了 BasicBlock 类作为 ResNet 中的基本块
# 模型中每个阶段重复 BasicBlock 的次数为 [3, 4, 6, 3]
model = SENet(BasicBlock, [3, 4, 6, 3], **kwargs)
return model3.SE注意力机制+ResNet50
只需要将SE注意力机制+ResNet18部分的代码中的def se_resnet_18部分换成如下即可:
def se_resnet_50(pretrained=False, **kwargs):
"""Constructs a ResNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
pretrained 表示是否使用在 ImageNet 数据集上预训练的模型
"""
# 使用了一个名为 SENet 的类来构建模型,同时也使用了 Bottleneck 类作为 ResNet 中的基本块
# [3, 4, 6, 3] 是一个列表,表示模型中每个阶段(stage)中重复 BasicBlock 的次数
model = SENet(Bottleneck, [3, 4, 6, 3], **kwargs)
return model4.SE注意力机制+ResNet101
只需要将SE注意力机制+ResNet18部分的代码中的def se_resnet_18部分换成如下即可:
def se_resnet_101(pretrained=False, **kwargs):
"""Constructs a ResNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
pretrained 表示是否使用在 ImageNet 数据集上预训练的模型
"""
# 使用了一个名为 SENet 的类来构建模型,同时也使用了 Bottleneck 类作为 ResNet 中的基本块
# [3, 4, 23, 3] 是一个列表,表示模型中每个阶段(stage)中重复 BasicBlock 的次数
model = SENet(Bottleneck, [3, 4, 23, 3], **kwargs)
return model5.SE注意力机制+ResNet152
只需要将SE注意力机制+ResNet18部分的代码中的def se_resnet_18部分换成如下即可:
def se_resnet_152(pretrained=False, **kwargs):
"""Constructs a ResNet-152 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
pretrained 表示是否使用在 ImageNet 数据集上预训练的模型
"""
# 使用了一个名为 SENet 的类来构建模型,同时也使用了 Bottleneck 类作为 ResNet 中的基本块
# [3, 4, 36, 3] 是一个列表,表示模型中每个阶段(stage)中重复 BasicBlock 的次数
model = SENet(Bottleneck, [3, 8, 36, 3], **kwargs)
return model
















 116
116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









