






汽车操稳性控制,主动前轮转向控制,AFS
软件使用:Matlab/Simulink
适用场景:轮毂电机分布式驱动电动汽车主动前轮转向控制(AFS),可实现多种工况下整车行驶稳定性。
产品simulink源码包含如下模块(购买时选取一种搭配即可):
→整车模块:7自由度整车模型
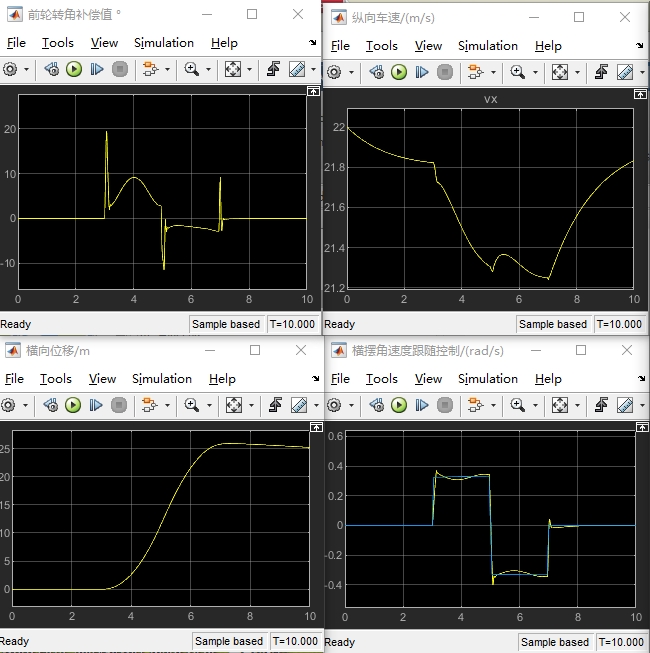
→控制器:滑模控制
→控制规律:横摆角速度跟随控制,+质心侧偏角联合控制(包括两个模块)
方式:客户可选择多种控制规律。
不同选择price有差异。
例如可选择7自由度整车模块+滑模控制+横摆角速度跟随控制方案,该方案为基础款,一般增加一种方案每个模块需要额外加price
包含:simulink源码文件,详细建模说明文档,对应参考资料
适用于需要或想学习整车动力学simulink建模,以及simulink控制算法建模的朋友。
模型运行完全OK
ID:73293644523272266
青青猪儿
汽车操稳性控制在现代汽车技术中起着非常重要的作用。它能够通过对汽车前轮的控制来实现整车行驶的稳定性,并保证驾驶员的安全。为了实现这一目标,一种被广泛采用的方法是采用主动前轮转向控制系统。本文将介绍一种基于轮毂电机分布式驱动电动汽车主动前轮转向控制系统(AFS)的技术方案,并借助Matlab Simulink进行软件开发和仿真。
AFS系统的主要目标是在多种工况下提高整车的行驶稳定性。为了实现这一目标,我们使用了Matlab Simulink进行系统的建模和仿真。Simulink是一种功能强大的模块化仿真环境,它可以帮助我们快速建立整车的控制系统,并进行性能分析和优化。
在我们的方案中,整车模块是系统的核心部分。我们使用了7自由度整车模型来描述整车的运动特性。该模型考虑了车辆在空间中的运动自由度,并与其他模块进行数据交互。这种模块化的设计使得整车模型的搭建更加灵活和可扩展。
控制器模块是实现主动前轮转向控制的关键部分。在我们的方案中,我们采用了滑模控制算法来实现对前轮转角的控制。滑模控制算法是一种被广泛应用于汽车操稳性控制领域的控制策略,它能够通过引入滑模面来实现对系统状态的快速调节。
除了滑模控制算法外,我们还引入了横摆角速度跟随控制和质心侧偏角联合控制两个模块。这些模块通过与滑模控制算法的配合使用,可以进一步提高整车行驶的稳定性。客户可以根据自己的需求选择不同的控制规律,不同的选择将会对价格产生影响。
对于想要学习整车动力学建模和Simulink控制算法的朋友来说,本方案是一个非常好的选择。我们提供了完整的Simulink源码文件和详细的建模说明文档,以及对应的参考资料。通过学习和理解这些资料,用户可以深入了解整车动力学建模和Simulink控制算法的原理和方法,并在此基础上进行自己的研究和开发。
最后,我们想强调的是,我们的模型是经过充分运行和验证的。在模型运行过程中,我们对系统的各个方面进行了全面的测试,包括系统的稳定性、响应速度和控制精度等。经过多次实验和优化,我们的模型已经达到了预期的效果,并且在实际应用中取得了良好的效果。
综上所述,我们的基于轮毂电机分布式驱动电动汽车主动前轮转向控制系统(AFS)的技术方案是一种可靠和有效的解决方案。通过采用Simulink进行软件开发和仿真,我们能够快速搭建整车控制系统,并进行性能分析和优化。同时,我们提供了完整的源码和文档,以及对应的参考资料,方便用户进行学习和研究。希望通过这篇文章的介绍,能够对读者对汽车操稳性控制和主动前轮转向控制系统有一个更深入的理解。
相关的代码,程序地址如下:http://imgcs.cn/644523272266.html
















 562
562











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









