







贝叶斯和机器人的恩怨情仇
严格意义上来说,应该是概率机器人,至于为什么,as follow
先看一下贝叶斯能解决什么机器人问题
四旋翼定位场景
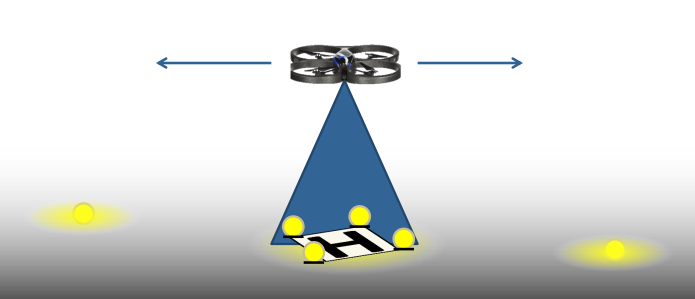
如下图的一只可爱的飞行机器人,想通过地面上的灯泡来找到自己的着陆区
**目标:**找到地面的着陆区域
**定位依据:**飞机通过身上的光传感器对地面的发光灯泡进行识别。
按照常理,传感器识别到光照,直接移动过去不就好了嘛~有啥可说的
但是,(但是来了),如果传感器误动作了怎么办?如果受到了其他的光线干扰了怎么办?
比如:如果地面上是一滩水,把太阳光反射到了机器人的传感器上,机器人以为识别到了灯,开开心心的停了上去,那你的机器人岂不是分分钟打了水漂?(en~ 水漂)
这个是时候就引入概率问题,就是说世界的一切我都保持理性的怀疑态度,我有一定可能接受你。
对上述问题进行概率描述:
-
传感器有两种状态:感受到光 丨 没感受到光
-
世界 有两种状态:是着陆点 丨 不是着陆点
用数学符号表达一下:

对于传感器的准确性,用两个条件概率描述
- 确实是着落点时 感受到光的概率:0.6(实际我觉得咋也不止这么低哇)
- 不是着落点时 感受到光的概率:0.3
用数学符号表达一下:

假设一个先验概率:飞到着陆点的概率是0.5
用数学符号表达一下:

那回顾下我们的目标是什么?
是检测到了光,那么它是着落点的概率是多大(我能不能信你)
用数学符号表达一下:

哎,学过贝叶斯公式和全概率公式的同学是不是觉得有点眼熟了?
(忘了来这回顾一下:贝叶斯公式)
这里我们一起回顾一下:贝叶斯公式

分母的两部分已知,分子现在还未知,这里我我们推导一下。
如果已知X Z的联合概率,求Z的概率就是求边缘概率有木有,那我对X求和不就是Z的概率嘛
数学符号表达一下:

理想很丰满,现实很骨感,联合概率我不知道啊我。哎别急,用已知求未知嘛
由条件概率:
那把分子乘到左边,不就是联合概率嘛


这样,Z的概率是不是就可以表达为如下的形式

重写一下贝叶斯公式:
整个公式,右边均已知,左边即可带入得出

就是说,就算是我们检测到光了,也只能有67%的概率相信它是着陆点。
可能有同学会说,这概率也忒低了,那我落还是不落。
害别急嘛,假如你传感器精准,就是 确实是着落点时 感受到光的概率:大于0.6,逼近于1.。你算算,概率不就高了嘛,但是这传感器精准度的提升往往伴随着价格的上升(大写的穷~呜呜呜),穷且意坚,我就想用它咋办(学好数学就能会过日子),3个臭皮匠顶个诸葛亮嘛。一个便宜的传感器不行,我用两种便宜的交叉一下呗。
就有了下面的计划:
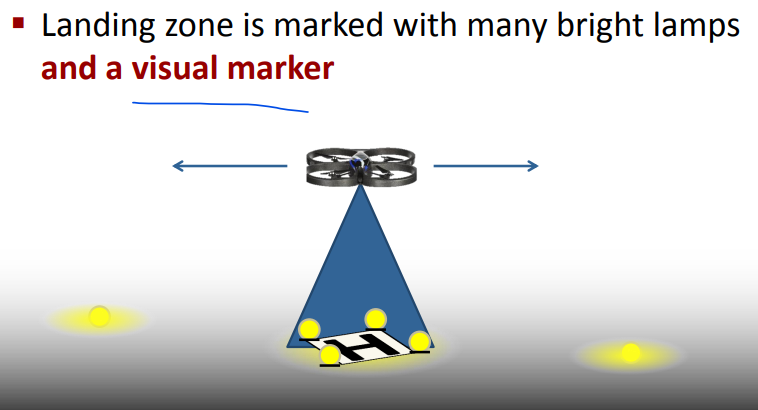
目标:还是找到着陆点
传感器:除了光照传感器,又加了一个便宜的视觉传感器,识别那个H字母
视觉传感器描述如下:
- 确实是着落点时 识别到H的概率:0.8(因为这个字母确实不容易被生活里的东西伪装)
- 不是着落点时 识别到H的概率:0.1
数学描述如下:

那这样,目的就是在2个传感器的作用下,确定着陆点的问题
数学符号描述下:
害,这不就是贝叶斯的一般形式嘛~

那回归到本题:利用上一步求出的 解法就应该是

准确率直升到94%,见识到贫穷,啊不,数学的力量木有。
所以嘛~ 女孩纸们。遇到贝叶斯学的好的男孩子就嫁了吧~ 多会过日子(疯狂暗示)
多元素贝叶斯这里后面计划详细展开一下。
结语:
其实贫穷这些是说着玩哈,考虑到一个公司真的要做一款机器人,想要实现量产和成本控制,硬件上一定是要精打细算的,硬件不够,算法来凑,降低成本,用最低的成本给用户带来高端的享受才是一个公司能够生存和立足的根本。
参考资料:
[1]. [ETH机器人课程PPT]
[2]. 科普中国:贝叶斯公式















 949
949











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









