







第五次机器人作业:EKF Simultaneous Localization And Mapping (SLAM)
文章目录
1 Introduction
本次练习建立在练习4的基础上,不同的是,基于地标定位的练习4依赖先验地图,而本次练习在探索环境的时候,自主建立地图。
2 EKF SLAM
EKF SLAM 用概率的方法去估计地图和机器人位姿,所以要添加一些地标的参数去表示EKF状态

这里我们假设地标是静态的,地标表示在一个状态向量中,地标之间的相关性和不确定性均已知。其数量和启动之前的估计也已知。
2.1 Time Update (propagation)
Task:任务
- 再利用练习4的结果,去推导和实现上面定义状态的状态预测和协方差传播
- 最后,修改
transitionFunction.m状态转移函数,
Validation:验证
- 运行
test/validateTransitionFunction.m函数 - 如果正确,得到输出
State transition function appears to be correct!.
插入代码
function [f, F_x, F_u] = transitionFunction(x,u,b)
% [f, F_x, F_u] = transitionFunction(x,u,b) predicts the state x at time t given
% the state at time t-1 and the input u at time t. b is the distance between
% the wheels f the differential-drive robot. F_x denotes the Jacobian
% of the state transition function with respect to the state evaluated at
% the state and input provided. F_u denotes the Jacobian of the state
% transition function with respect to the input evaluated at the state and
% input provided.
% State and input are defined according to the book pp. 337
if nargin < 3 || isempty(b)
b = .1;
end
del_s = (u(2) + u(1))/2;
del_t = (u(2) - u(1))/b;
f = x(:);
f(1:3,1) = [x(1); x(2); x(3)] + [del_s*cos(x(3)+del_t/2); del_s*sin(x(3)+del_t/2); del_t];
F_x = eye(size(x,1));
F_x(1,3) = -del_s*sin(x(3)+del_t/2);
F_x(2,3) = del_s*cos(x(3) + del_t/2);
F_u = zeros(size(x,1),2);
F_u(1:3,1:2) = [0.5*cos(x(3)+del_t/2)+(del_s/(2*b))*sin(x(3)+del_t/2), 0.5*cos(x(3)+del_t/2)-(del_s/(2*b))*sin(x(3)+del_t/2); ...
0.5*sin(x(3)+del_t/2)-(del_s/(2*b))*cos(x(3)+del_t/2), 0.5*sin(x(3)+del_t/2)+(del_s/(2*b))*cos(x(3)+del_t/2); ...
-1/b 1/b];
运行validateTransitionFunction.m验证
>> validateTransitionFunction
State transition function appears to be correct!

2.2 Measurement Update
Task:任务
- 修改
measurementFunction.m.函数 - 实现一个测量函数,该函数返回给定的状态矢量(现在包括机器人状态和地标)和等式6中定义的地标索引的预测测量
- 另外,提供相对于状态向量的测量的对应雅可比行列式。与练习4相比,界标位置现在是状态向量的一部分。这必须反映在雅可比算术中
Validation:验证
- 运行
test/validateMeasurementFunction.m函数
插入代码
function [h, H_x] = measurementFunction(x, idxLandmark)
% [h, H_x] = measurementFunction(x, idxLandmark) returns the predicted measurement
% given a state x and a single map entry with index idxLandmark. H_x denotes the Jacobian of the
% measurement function with respect to the state evaluated at the state
% provided.
% Map entry and state are defined according to the book pp. 337-338
%Extract individual landmark from the state vector
m = x(3+2*(idxLandmark-1)+1:3+2*(idxLandmark));
if x(1,1) == 0 || x(2,1) == 0
h = [0;0];
H_x = zeros(2,length(x));
return
end
h = [m(1) - x(3); m(2) - (x(1,1)*cos(m(1))+x(2,1)*sin(m(1)))];
H_x = zeros(2,length(x));
H_x(1:2,1:3) = [0 0 -1; -cos(m(1)) -sin(m(1)) 0];
%Do not correct first two landmarks as they remain fixed
if (idxLandmark>2)
H_x(1,3 + (idxLandmark-1)*2+1) = 1;
H_x(2,3 + (idxLandmark-1)*2+1) = x(1)*sin(m(1))-x(2)*cos(m(1));
H_x(1,3 + (idxLandmark)*2) = 0;
H_x(2,3 + (idxLandmark)*2) = 1;
end
[h(1), h(2), isRNegated] = normalizeLineParameters(h(1), h(2));
if isRNegated
H_x(2, :) = - H_x(2, :);
end
运行validateMeasurementFunction.m函数(将help_函数都包含上,省的排查)
>> validateMeasurementFunction
measurement function appears to be correct!
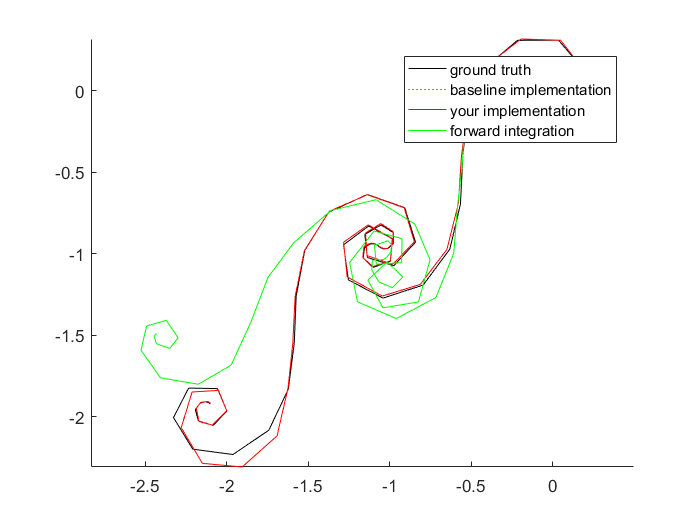
2.3 Validation of Complete EKF SLAM System
随着状态传播和测量更新的进行,现在是时候验证完整的EKF SLAM设置了。
- 运行
test/validateFilter.m.函数,这将评估过滤器是否将提供与基准实施相同的输出
>> validateFilter
State transition function appears to be correct!
- 运行
test/validateCompleteEKFLoop.m函数,使用随机生成的输入值评估过滤器
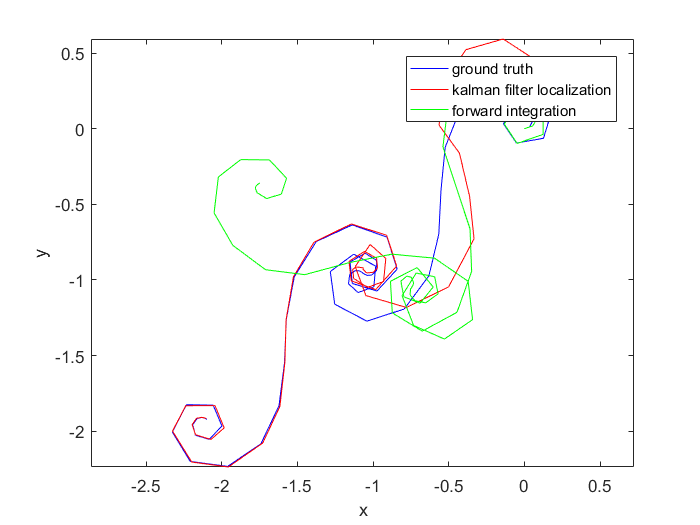
可见CompleteEKF算法的跟踪精度非常精确
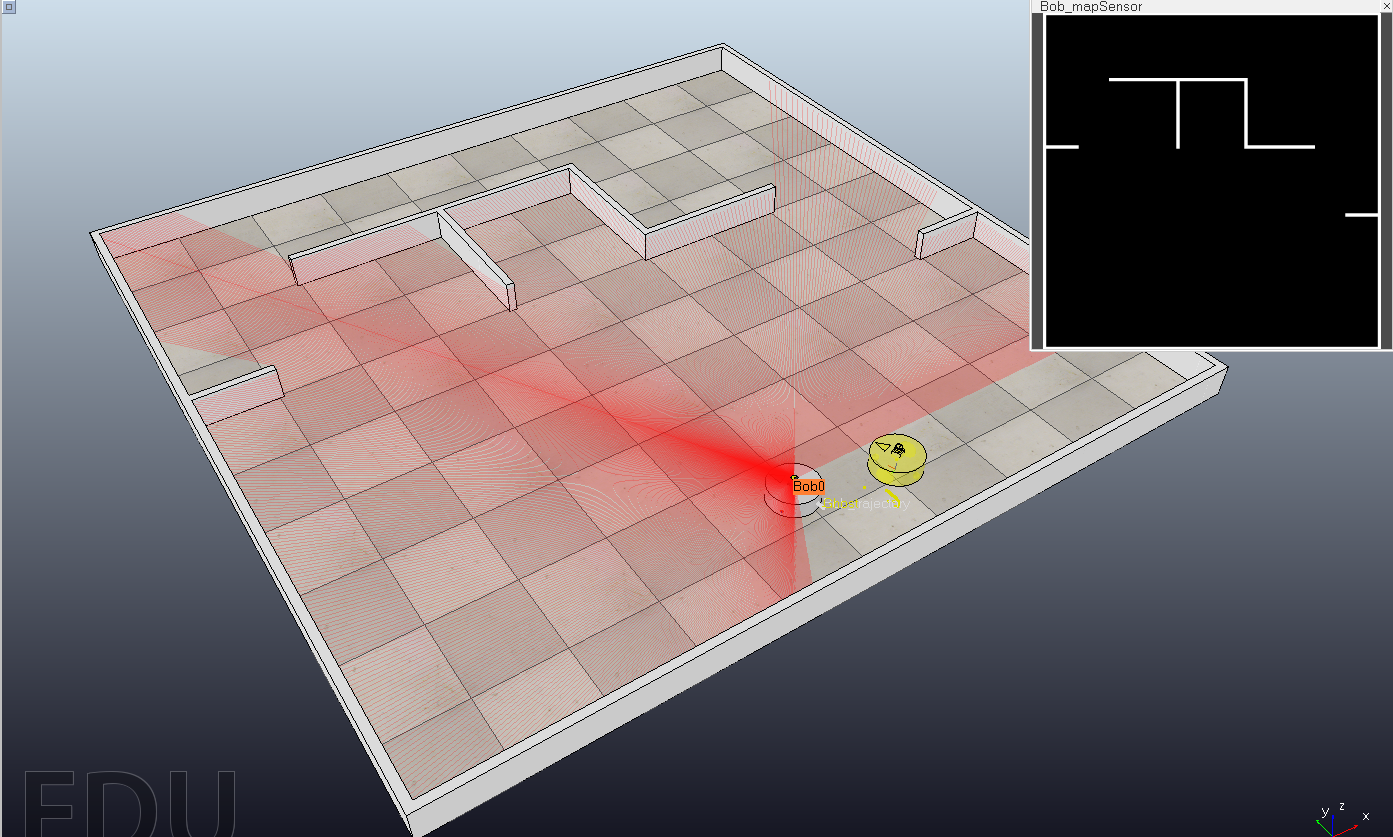
3 V-REP Experiment
Task:任务
至此,EKF localization and mapping都已经通过0测试,接下来在VREP中测试一下整体功能
Validation:验证
- Start V-REP, load scene scene/mooc_exercises.ttt,运行仿真
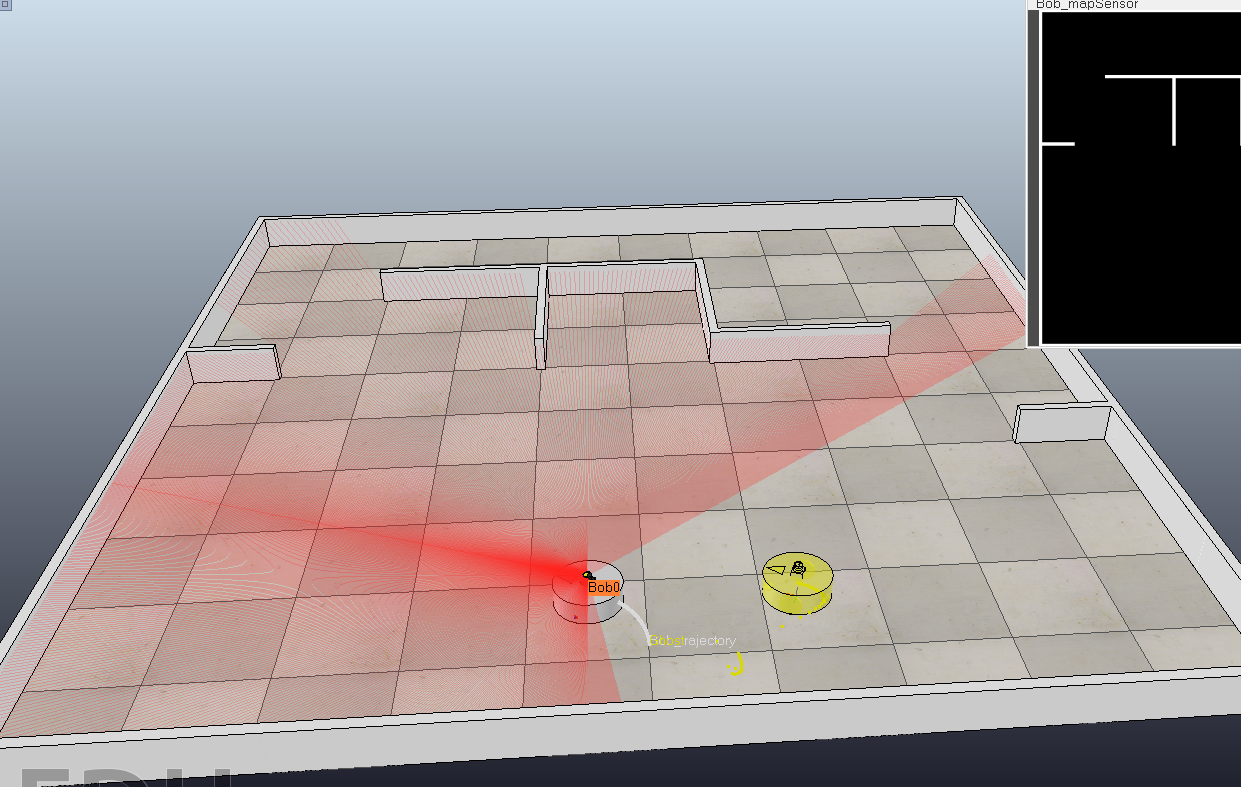
- 打开matlab,运行
vrep/vrepSimulation.m - 在实际的机器人旁边,会看到一个黄色的“鬼影”,该图形可以根据本地化情况估算出姿势。如果一切操作正确,将在机器人的姿势之后看到黄色的鬼影















 3026
3026











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









