







中断管理:
在STM32中,中断优先级是通过中断优先级配置寄存器的高4位 [7:4] 来配置的。因此STM32支持最多16级中断优先级,其中数值越小表示优先级越高,即更紧急的中断。(FreeRTOS任务调度的任务优先级相反,是数值越大越优先)
FreeRTOS可以与STM32原生的中断机制结合使用,但它提供了自己的中断管理机制,主要是为了提供更强大和灵活的任务调度和管理功能。
FreeRTOS中,将PendSV和SysTick设置最低中断优先级(数值最大,15),保证系统任务切换不会阻塞系统其他中断的响应。
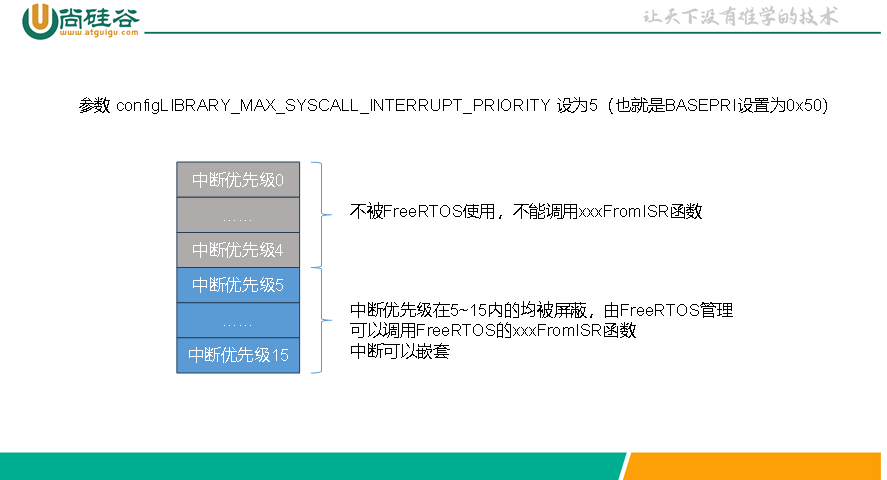
FreeRTOS利用BASEPRI寄存器实现中断管理,屏蔽优先级低于某一个阈值的中断。比如: BASEPRI设置为0x50(只看高四位,也就是5),代表中断优先级在5~15内的均被屏蔽,0~4的中断优先级正常执行。
在中断服务函数中调用FreeRTOS的API函数需注意:
- 中断服务函数的优先级需在FreeRTOS所管理的范围内,阈值由configMAX_SYSCALL_INTERRUPT_PRIORITY指定。
- 建议将所有优先级位指定为抢占优先级位,方便FreeRTOS管理。
- 在中断服务函数里边需调用FreeRTOS的API函数,必须使用带“FromISR”后缀的函数。
实验目标:
学会FreeRTOS中断管理:
- 设置管理的优先级范围:5~15。
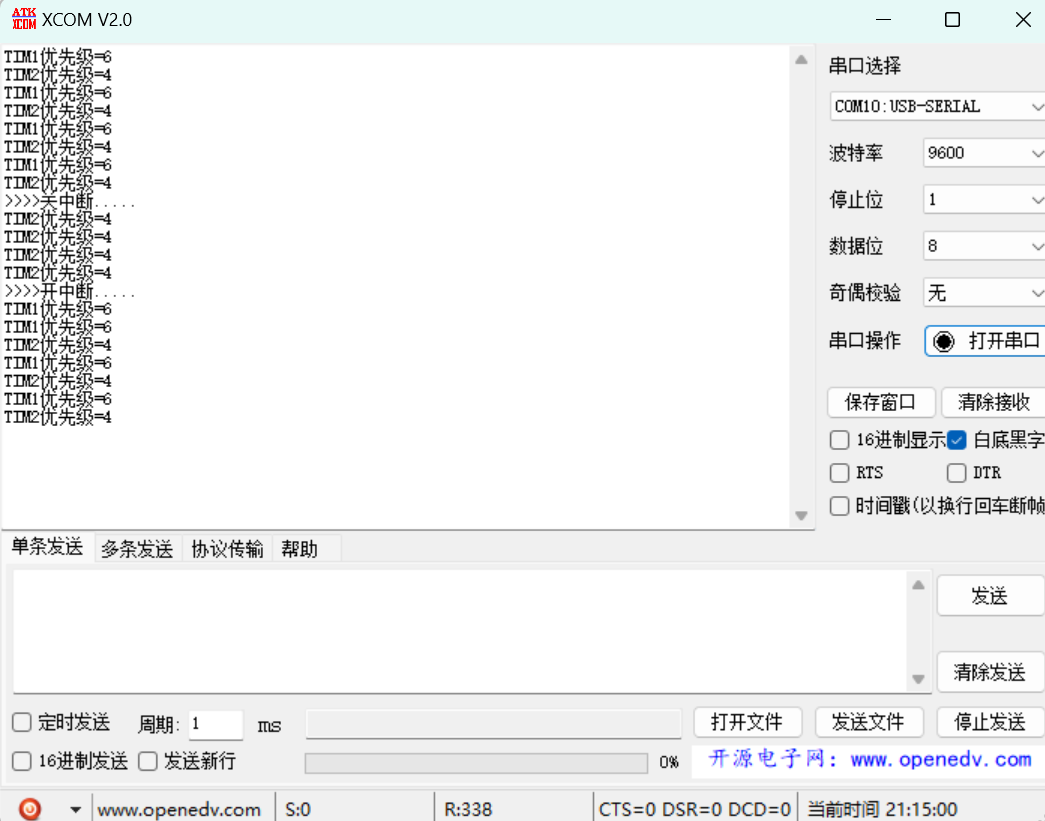
- 使用两个定时器,一个优先级为4,一个优先级为6。
- 两个定时器每1s,打印一段字符串。
- task1:按下KEY1,关中断,按下KEY2,开中断。
观察两个定时器的打印情况。
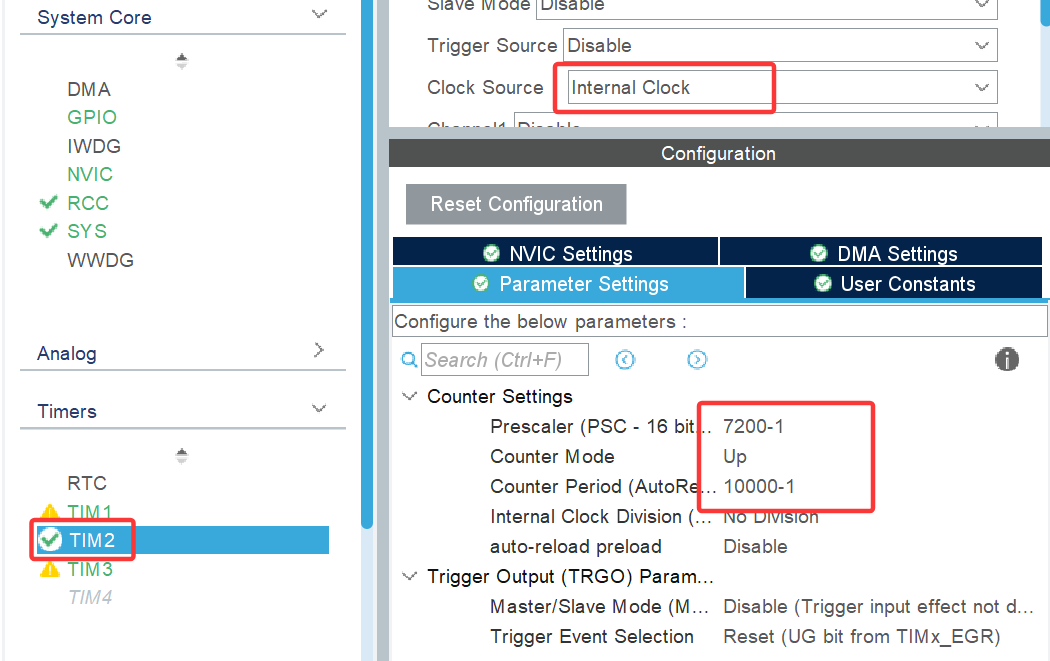
CubeMX两个定时器:
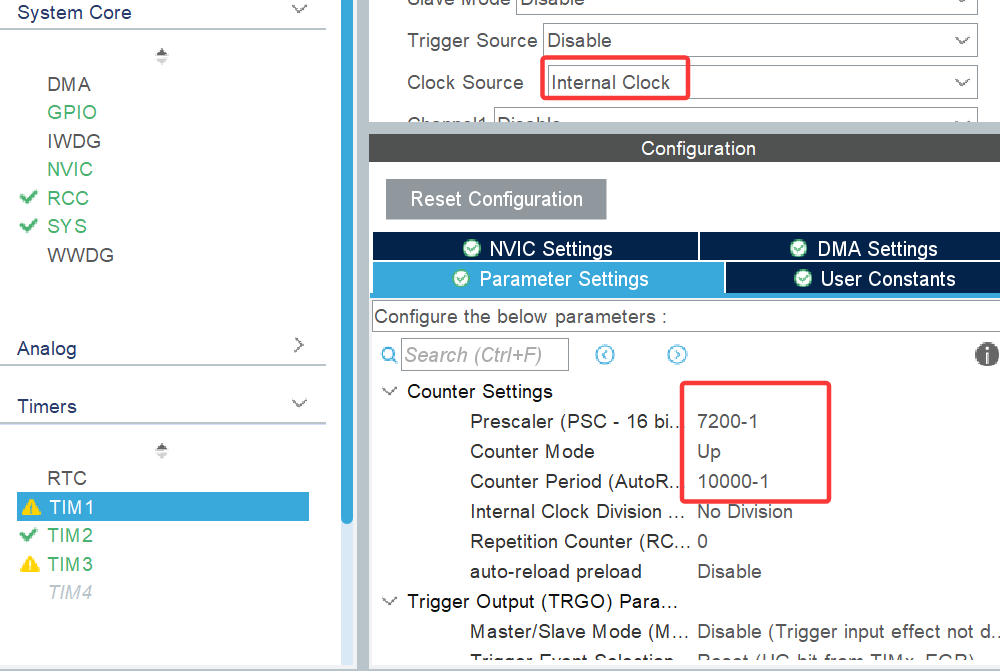
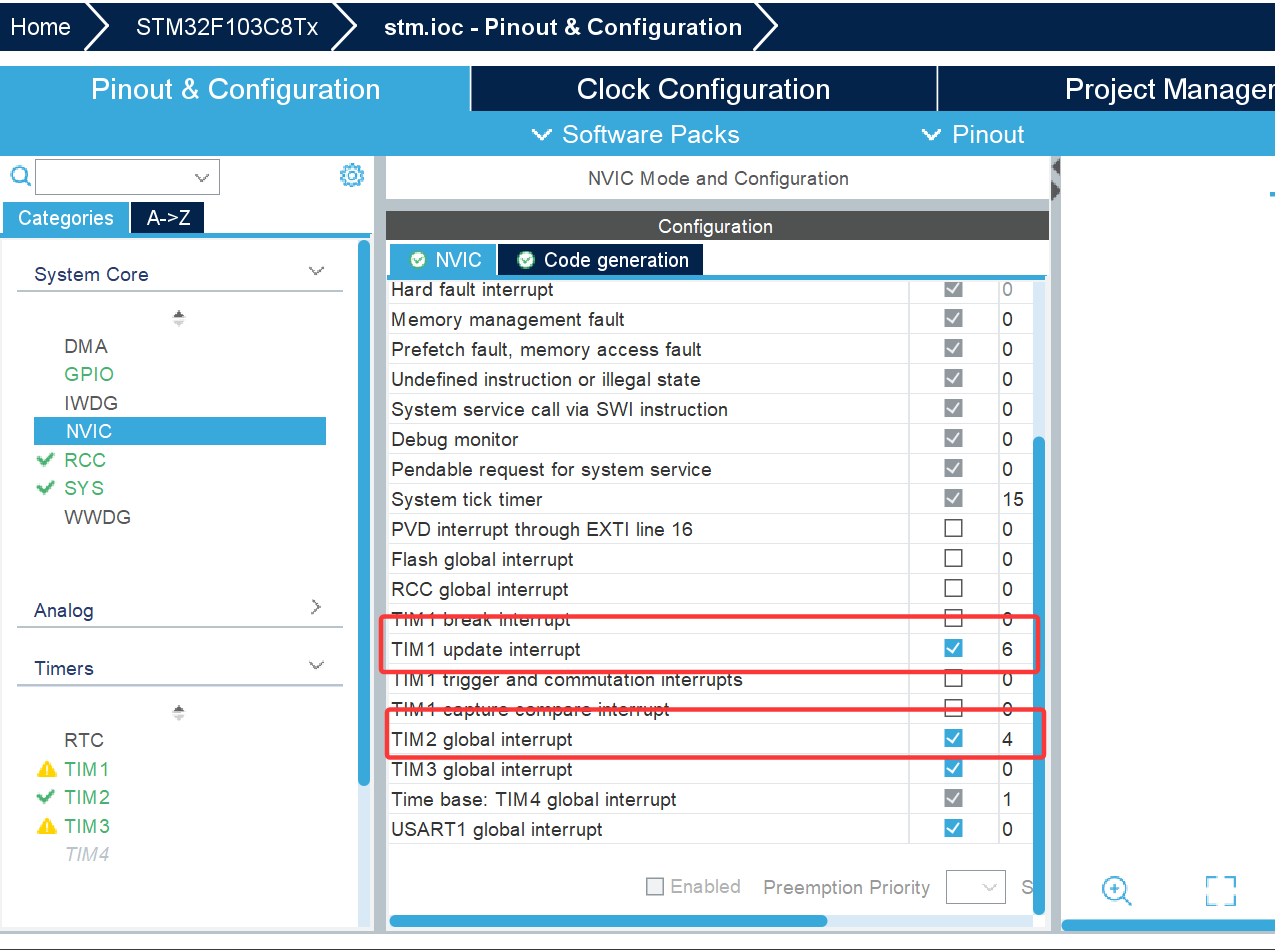
定时器TIM1设置为1s定时,中断优先级为6
定时器TIM2设置为1s定时,中断优先级为4
中断管理宏定义:
/*3. 中断嵌套行为相关配置 cm3内核:我们要求4个优先级位全部为抢占优先级位
最高优先级是 0
最低优先级是 15
*/
/* 设置 RTOS 内核自身使用的中断优先级。 一般设置为最低优先级, 不至于屏蔽其他优先级程序*/
#define configKERNEL_INTERRUPT_PRIORITY (15 << 4)
/* 设置了 调用中断安全的 FreeRTOS API 函数的最高中断优先级。 FreeRTOS 的管理的最高优先级 */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY (5 << 4)
/* 同上. 仅用于新版移植。 这两者是等效的。 */
#define configMAX_API_CALL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITYfreertos_demo.c
/*
* @Author: random
* @Date: 2025-05-10 01:23:40
* @Last Modified by: random
* @Last Modified time: Do not Edit
*/
#include "freertos_demo.h"
/* freertos相关的头文件,必须的 */
#include "FreeRTOS.h"
#include "task.h"
/* 需要用到的其他头文件 */
#include "fun.h"
/* 启动任务的配置 */
#define START_TASK_STACK 128
#define START_TASK_PRIORITY 1
TaskHandle_t start_task_handle;
StackType_t start_task_stack[START_TASK_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t start_task_tcb; // 静态任务的tcb结构体类型
void start_task(void *pvParameters);
/* 任务1的配置 */
#define TASK1_STACK 128
#define TASK1_PRIORITY 2
TaskHandle_t task1_handle;
StackType_t task1_stack[TASK1_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task1_tcb; // 静态任务的tcb结构体类型
void task1(void *pvParameters);
/* ==================== 静态创建方式,需要手动指定2个特殊任务的资源======================= */
/* 空闲任务的配置 */
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE]; // 静态任务的任务栈,以数组形式存储
StaticTask_t idle_task_tcb; // 静态任务的tcb结构体类型
/* 软件定时器任务的配置 */
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH]; // 静态任务的任务栈,以数组形式存储
StaticTask_t timer_task_tcb; // 静态任务的tcb结构体类型
/* 分配空闲任务的资源 */
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize)
{
*ppxIdleTaskTCBBuffer = &idle_task_tcb;
*ppxIdleTaskStackBuffer = idle_task_stack;
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/* 分配软件定时器任务的资源 */
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize)
{
*ppxTimerTaskTCBBuffer = &timer_task_tcb;
*ppxTimerTaskStackBuffer = timer_task_stack;
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
/**
* @description: 启动FreeRTOS
* @return {*}
*/
void freertos_start(void)
{
/* 1.创建一个启动任务 */
start_task_handle = xTaskCreateStatic(
(TaskFunction_t)start_task, // 任务函数的地址
(char *)"start_task", // 任务名字符串
(uint32_t)START_TASK_STACK, // 任务栈大小,默认最小128,单位4字节
(void *)NULL, // 传递给任务的参数
(UBaseType_t)START_TASK_PRIORITY, // 任务的优先级
(StackType_t *)start_task_stack, // 任务栈的地址
(StaticTask_t *)&start_task_tcb); // tcb的地址
/* 2.启动调度器:会自动创建空闲任务和空闲任务(如果开启),静态创建的方式需要去实现2个分配资源的接口函数 */
vTaskStartScheduler();
}
/**
* @description: 启动任务:用来创建其他Task
* @param {void} *pvParameters
* @return {*}
*/
void start_task(void *pvParameters)
{
/* 进入临界区:保护临界区里的代码不会被打断 */
taskENTER_CRITICAL();
/* 使用静态创建1个任务 */
task1_handle = xTaskCreateStatic(
(TaskFunction_t)task1,
(char *)"task1",
(configSTACK_DEPTH_TYPE)TASK1_STACK,
(void *)NULL,
(UBaseType_t)TASK1_PRIORITY,
(StackType_t *)task1_stack, // 任务栈的地址
(StaticTask_t *)&task1_tcb); // tcb的地址
/* 启动任务只需要执行一次即可,用完就删除自己 */
vTaskDelete(NULL);
/* 退出临界区 */
taskEXIT_CRITICAL();
}
/**
* @description: 任务一:判断按键KEY1是否按下,按下则删掉task1
* @param {void} *pvParameters
* @return {*}
*/
struct keys key[3] = {0}; // 定义按键结构体
void task1(void *pvParameters)
{
while (1)
{
if (key[0].short_flag == 1)
{
/* 关中断 */
printf(">>>>关中断.....\r\n");
portDISABLE_INTERRUPTS();
key[0].short_flag = 0;
}
else if (key[1].short_flag == 1)
{
/* 开中断 */
printf(">>>>开中断.....\r\n");
portENABLE_INTERRUPTS();
key[1].short_flag = 0;
}
// HAL_Delay(500); //这种delay不会让任务进入阻塞态,不会让出cpu使用权
/* 为了观察实验现象,不要调用freertos的延时函数,底层会去开关中断,影响现象 */
// vTaskDelay(500);
/* 使用HAL_Delay前提:HAL时钟修改成其他定时器,并且中断优先级高于freertos的管理范围 */
}
}
freertos_demo.h
/*
* @Author: random
* @Date: 2025-05-10 01:23:57
* @Last Modified by: random
* @Last Modified time: Do not Edit
*/
#ifndef __FREERTOS_DEMO_H
#define __FREERTOS_DEMO_H
#include "main.h"
struct keys
{
uchar key_judge;
uchar key_sta;
uint key_time;
uchar short_flag;
uchar long_flag;
};
extern struct keys key[];
void freertos_start(void);
#endif
中断回调函数void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
if (htim->Instance == TIM1)
{
printf("TIM1优先级=6 \r\n");
}
if (htim->Instance == TIM2)
{
printf("TIM2优先级=4 \r\n");
}
/* USER CODE END Callback 0 */
if (htim->Instance == TIM4)
{
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
if (htim->Instance == KEY_T)
{
key[0].key_sta = HAL_GPIO_ReadPin(KEY1_G, KEY1_P);
key[1].key_sta = HAL_GPIO_ReadPin(KEY2_G, KEY2_P);
key[2].key_sta = HAL_GPIO_ReadPin(KEY3_G, KEY3_P);
for (int i = 0; i < 4; i++)
{
switch (key[i].key_judge)
{
case 0: // 检测按键
{
if (key[i].key_sta == 0)
{
key[i].key_judge = 1;
key[i].key_time = 0;
}
}
break;
case 1: // 按键按下
{
if (key[i].key_sta == 0)
{
key[i].key_judge = 2;
key[i].key_time = 0;
}
else
{
key[i].key_judge = 0;
}
}
break;
case 2: // 按键松开
{
if (key[i].key_sta == 1)
{
if (key[i].key_time < 70)
{
key[i].short_flag = 1;
}
if (key[i].key_time > 70)
{
key[i].long_flag = 1;
}
key[i].key_judge = 0;
}
else
{
key[i].key_time++;
}
}
break;
}
}
}
}main初始化
/* 开启按键定时器TIM1-3 */
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_Base_Start_IT(&htim2);
/* 启动FreeRTOS */
freertos_start();
/* 注意:在进入freertos后面的代码,没机会执行 */测试结果:
时间片调度:
在FreeRTOS中,同等优先级的任务会轮流分享相同的CPU时间,这个时间被称为时间片。在这里,一个时间片的长度等同于SysTick中断的周期。
实验目标:
理解FreeRTOS的时间片调度:
- start_task:用来创建其他的2个任务。
- task1:通过串口打印task1的运行次数,设置任务优先级为2。
- task2:通过串口打印task2的运行次数,设置任务优先级为2。
为了更好观察现象,滴答定时器的中断频率设置为50ms中断一次(一个时间片)。
freertos.c
/* 任务1的配置 */
#define TASK1_STACK 128
#define TASK1_PRIORITY 2
TaskHandle_t task1_handle;
StackType_t task1_stack[TASK1_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task1_tcb; // 静态任务的tcb结构体类型
void task1(void *pvParameters);
/* 任务2的配置 */
#define TASK2_STACK 128
#define TASK2_PRIORITY 2
TaskHandle_t task2_handle;
StackType_t task2_stack[TASK2_STACK]; // 静态任务的任务栈,以数组形式存储
StaticTask_t task2_tcb; // 静态任务的tcb结构体类型
void task2(void *pvParameters);
/**
* @description: 任务一:打印任务1执行次数
* @param {void} *pvParameters
* @return {*}
*/
void task1(void *pvParameters)
{
uint16_t task1_count = 0;
while (1)
{
/* 临界区避免printf执行一半被打断 */
taskENTER_CRITICAL();
printf("task1运行次数=%d..\r\n", ++task1_count);
// vTaskDelay(500); //为了观察时间片调度,不使用freertos的延时函数
HAL_Delay(10); // 使用该延时的前提:HAL时钟修改成其他定时器,并且中断优先级较高
taskEXIT_CRITICAL();
}
}
/**
* @description: 任务二:打印任务2执行次数
* @param {void} *pvParameters
* @return {*}
*/
void task2(void *pvParameters)
{
uint16_t task2_count = 0;
while (1)
{
/* 临界区避免printf执行一半被打断 */
taskENTER_CRITICAL();
printf("task2运行次数=%d..\r\n", ++task2_count);
// vTaskDelay(500); //为了观察时间片调度,不使用freertos的延时函数
HAL_Delay(10); // 使用该延时的前提:HAL时钟修改成其他定时器,并且中断优先级较高
taskEXIT_CRITICAL();
}
}
更改任务的优先级都为2,修改任务
宏定义:
#define configUSE_TIME_SLICING 1
#define configTICK_RATE_HZ ( ( TickType_t ) 20 ) //1s/20=50ms一个tick
















 1361
1361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









