






永磁同步电机(pmsm,全速度切换无位置传感器控制(高速可以是超螺旋滑模)
低速可以是脉振高频方波注入,量产方案,仿真模型。
切换有加权切换和双坐标切换。
高速反电动势无感
量产方案
标题:永磁同步电机的全速度切换无位置传感器控制技术研究
摘要:本文针对永磁同步电机 (Permanent Magnet Synchronous Motor,简称PMSM) 这一先进电机技术,探讨了其全速度切换无位置传感器控制技术。通过深入分析其原理及应用场景,提出了一种基于高速超螺旋滑模及低速脉振高频方波注入的量产方案。文章通过建立仿真模型,验证了该方案的可行性和稳定性。同时,对于切换方式,本文提出了加权切换和双坐标切换两种方法,为实际应用提供了多种选择。
第一章 引言
1.1 研究背景
永磁同步电机作为一种高效、高性能的电机技术,在工业领域得到了广泛应用。然而,其传统的位置传感器控制方案存在成本高、可靠性差等问题,限制了其在一些特殊场景的应用。因此,全速度切换无位置传感器控制技术的研究具有重要意义。
1.2 文章结构
本文主要围绕全速度切换无位置传感器控制技术展开研究。首先,介绍了永磁同步电机及其在工业领域的应用。接着,详细分析了全速度切换无位置传感器控制技术的原理和特点。然后,提出了一种基于高速超螺旋滑模与低速脉振高频方波注入的量产方案,并建立了仿真模型进行验证。最后,对切换方式进行了探讨,并总结了本文的研究成果。
第二章 永磁同步电机及其应用
2.1 永磁同步电机的基本原理
永磁同步电机是一种通过电磁场与永磁场相互作用产生转矩的电机。本节主要介绍了其基本原理和工作方式,为后续的研究提供了基础。
2.2 永磁同步电机在工业领域的应用
永磁同步电机因其高效能、高性能等特点,广泛应用于工业领域。本节主要介绍了其在电动汽车、机床、风力发电等领域的应用情况,并分析了其面临的问题和挑战。
第三章 全速度切换无位置传感器控制技术
3.1 传统控制方案存在的问题
传统的位置传感器控制方案存在成本高、可靠性差等问题,限制了永磁同步电机的应用。因此,开发一种全速度切换无位置传感器控制技术迫在眉睫。
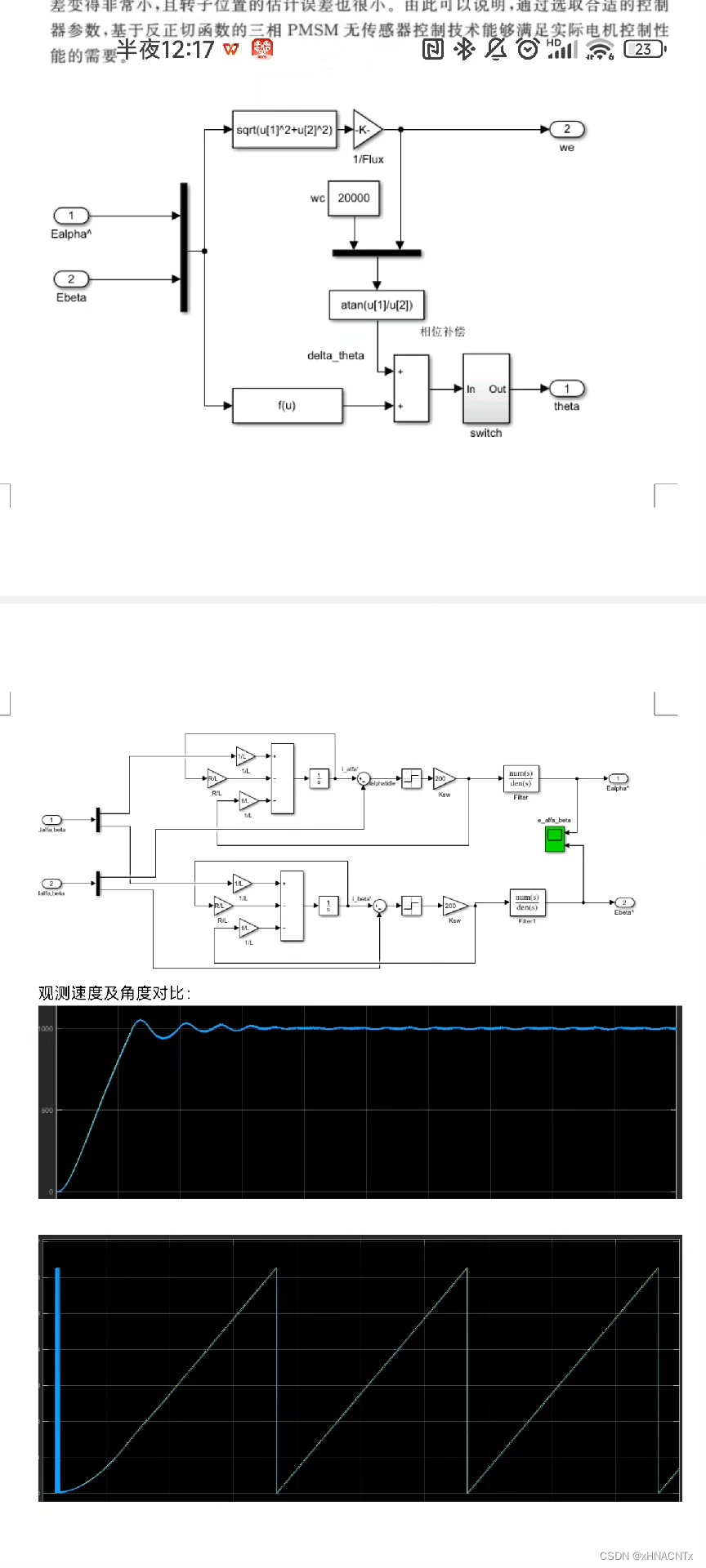
3.2 全速度切换无位置传感器控制技术原理
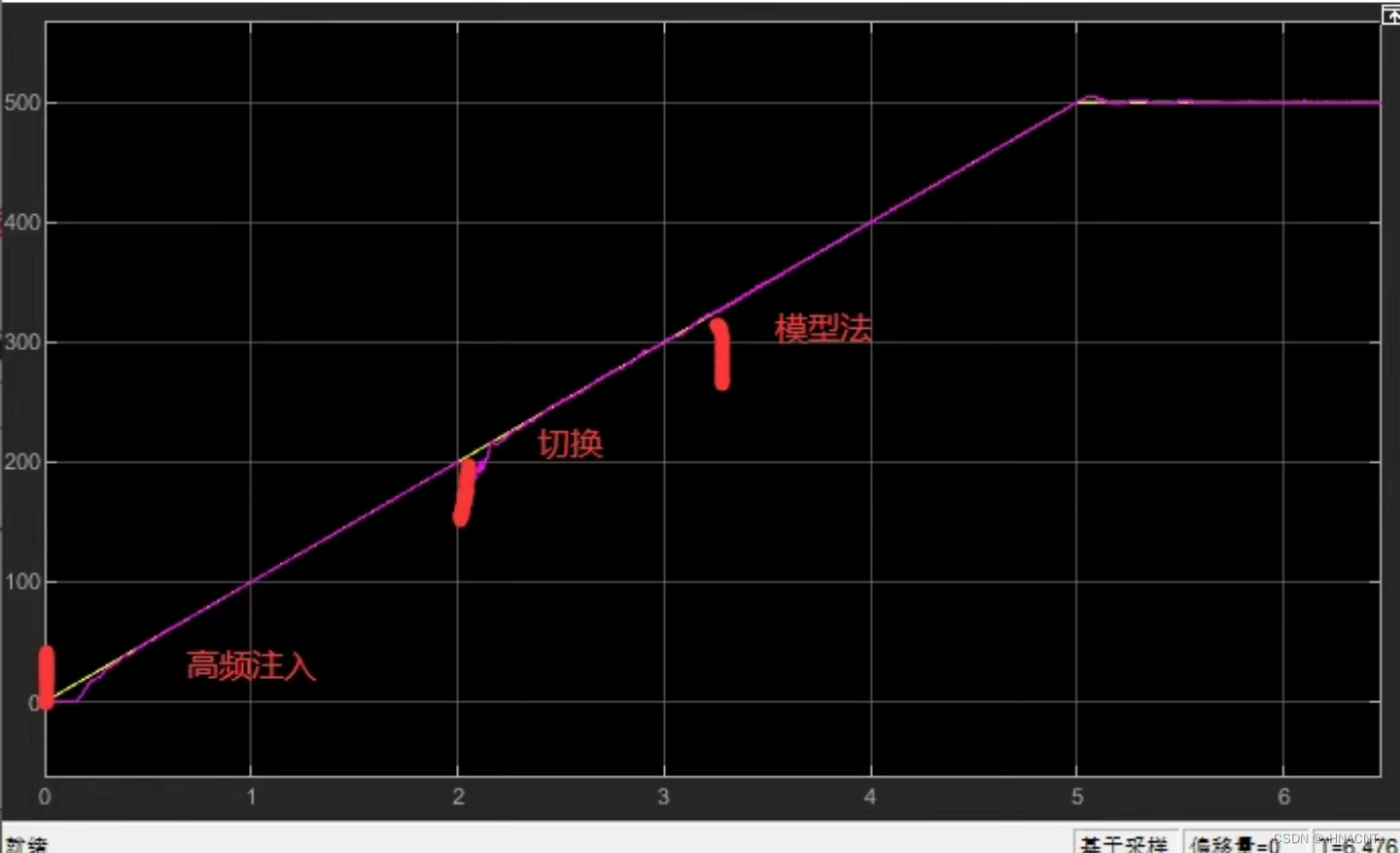
本节详细介绍了全速度切换无位置传感器控制技术的原理和工作方式。通过采用高速超螺旋滑模和低速脉振高频方波注入技术,实现了对永磁同步电机全速度范围的无位置传感器控制。
第四章 量产方案及仿真模型验证
4.1 量产方案设计
基于前述的全速度切换无位置传感器控制技术原理,本节提出一种针对量产的方案设计。通过详细介绍方案的具体参数和实施细节,为实际应用提供了指导。
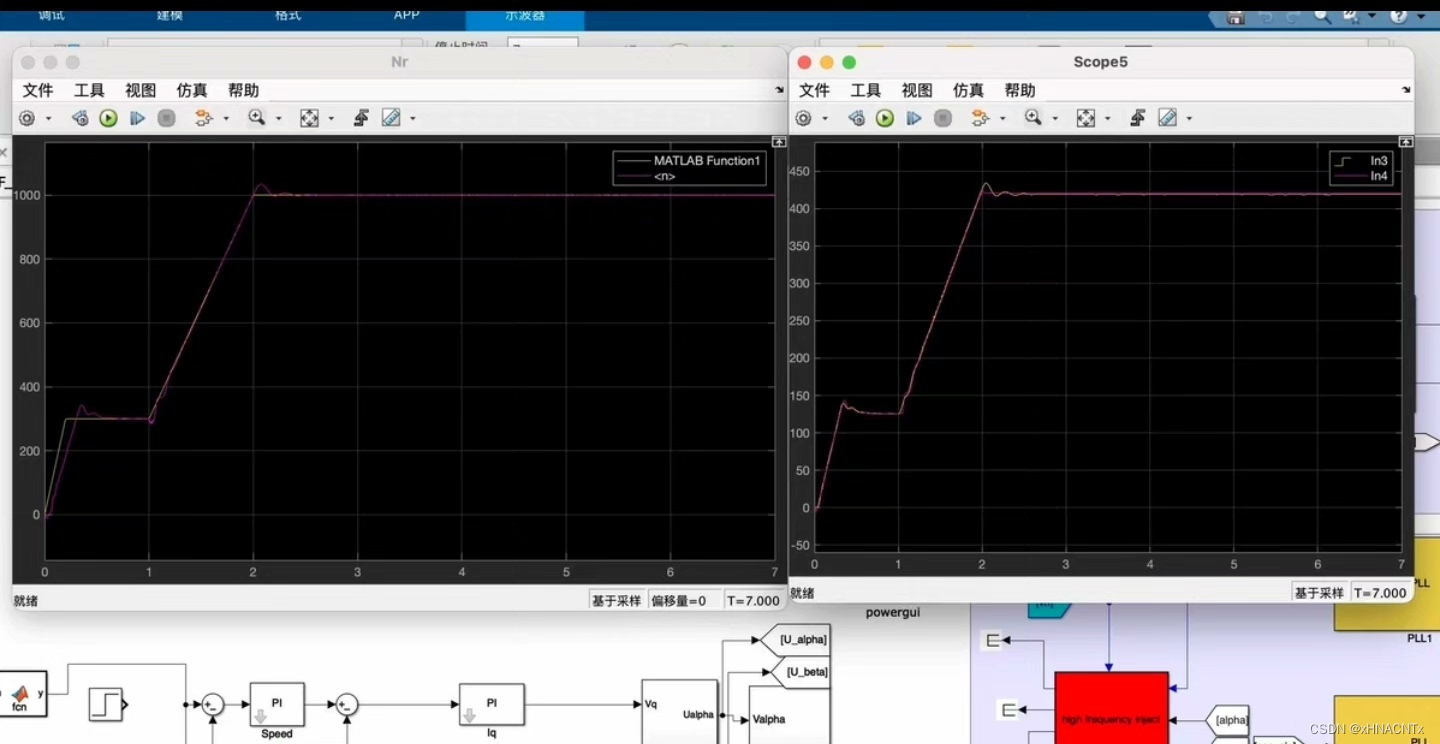
4.2 仿真模型建立与验证
为验证量产方案的可行性和稳定性,本文采用仿真模型进行系统性能的评估。通过对模型的搭建和仿真分析,验证了该方案在不同工况下的性能表现。
第五章 切换方式探讨
5.1 加权切换方法
本节介绍了加权切换方法的原理和应用情况。通过分析该方法的优缺点,为实际应用提供了参考。
5.2 双坐标切换方法
本节详细介绍了双坐标切换方法的工作原理和实施步骤。通过模拟实验,验证了该方法的可行性和有效性。
第六章 结论与展望
6.1 结论总结
通过对永磁同步电机全速度切换无位置传感器控制技术的研究,本文提出了一种基于高速超螺旋滑模与低速脉振高频方波注入的量产方案。通过仿真模型验证,证明了该方案的可行性和稳定性。
6.2 展望未来
针对目前存在的问题和挑战,本文对全速度切换无位置传感器控制技术的未来发展进行了展望,并提出了一些可能的改进方向和研究方向。
相关代码,程序地址:http://imgcs.cn/lanzoun/709616590209.html















 1512
1512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









