







磁悬浮装置原理
大家可能都玩过这种磁悬浮玩具,它们的工作原理与此类似。

首先,让我们了解一下这个原理,其实非常简单。它主要依赖于磁力对悬浮物体的控制。基本原理如下:在浮子的正下方放置一个霍尔传感器。当传感器检测到浮子向左移动时,两边的线圈会分别产生吸引和排斥的力,从而将浮子推向右侧。相反,如果浮子向右移动,两个线圈的电流方向会同时反转,这样总共两组共四个线圈就能够将浮子限制在二维平面内。然而,线圈产生的力相对较小,因此只能推动浮子在水平面上移动。为了克服浮子的重力使其悬浮起来,需要在四个线圈下方增加一个大型环形磁铁来提供斥力。
为了实现浮子的稳定悬浮,我们使用了前后左右共四个线圈和两个霍尔传感器。

为了使悬浮更加稳定,我们采用了PID控制的平衡算法。了解PID算法有助于我们理解整个实验原理。以下是关于PID的一段介绍:
在工程实际中,PID控制是最广泛应用的调节器控制机制。PID控制中的P代表比例(Proportion),I代表积分(Integral),D代表微分(Differential)。因此,PID控制即比例-积分-微分控制。
当被控对象的结构和参数不完全已知,或者无法获得精确的数学模型时,其他控制方法难以采用。此时,控制器的结构和参数需要结合经验和现场调试来确定,采用PID调节最为方便。
首先,比例控制是最简单的控制方式,类似于胡克定律中的比例系数。当控制器的输出与输入信号成比例关系时,可以得到一个比例系数。
其次,积分控制是指控制器的输出与输入的误差信号的积分有关。就像电路中的电感元件,某个时刻的电压与电流的积分有关。有时,信号的输出需要综合考虑之前的输入,这种综合往往是求和关系,因此使用积分控制简单易行。
最后,微分控制是指控制器的输出与输入信号的微分有关。最简单的微分关系是速度是位矢的微分。在控制悬浮物的平衡时,仅知道悬浮物偏离平衡位置的位移并采用比例控制是不够的。对于同样的偏离位移,悬浮物可能有不同的速度,因此我们需要对悬浮物采取不同的处理方法。而速度恰好是位矢的微分,所以我们可以通过对位移输入数据进行微分操作,实现对悬浮物的精确实时控制。
可见,PID控制器是一种动态的控制机制。以上是实现下推式磁悬浮的基本原理。借助这些基本原理和一定的软件算法实现,我们可以对悬浮物进行动态控制。
如果你对这些理论不太理解,也没关系。简单来说,我们将霍尔元件的读数(即浮子的位置)作为输入变量输入到PID函数中,设定一个目标值(即浮子在中间位置时的读数值),然后将输出赋值给PWM驱动线圈。剩下的工作就是调整PID参数,让它自动控制浮子。
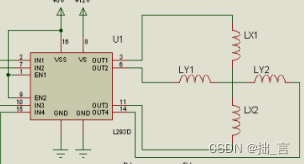
接下来是电路
这个其实电路并不复杂,回复中有人给了电路图了,这里再发一个简化一点的
最后的效果:

详细的文档和代码,资源下载:















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









