







这个分享资源提供了两轮自平衡小车的全方位学习资料,包括详细的原理图、PCB设计文件、完整的程序源码以及物料清单(BOM)。内容涵盖了小车的机械结构设计、电子电路搭建、软件编程逻辑以及必要的组件列表。研究完后,可以从零开始构建自己的两轮自平衡小车。
小车采用STM32F103C8T6位控制器,MPU6050为姿态感应传感器
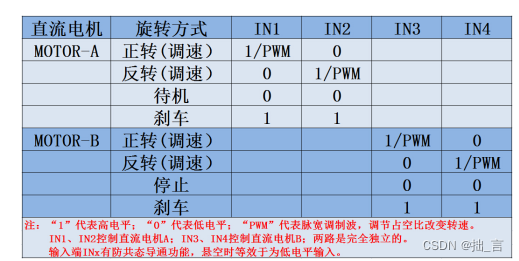
电驱2路直流电机驱动模块 正反转 PWM调速 双H桥 步进电机 迷你 完胜L298N
电机驱动模块非常适合在电池供电的智能小车、玩具小车、机器人等上面使用,供电电压2V~10V,可同时驱动两个直流电机或者1个4线2相式步进电机,可实现正反转和调速的功能,每路电流能到1.5A持续电流,峰值电流可达2.5A,有热保护并且能够自动恢复。
直流电机驱动逻辑真值表:
产品参数:
1.双路H桥电机驱动,可以同时驱动两路直流电机或者1个4线两相式步进电机;
2.模块供电电压2V-10V;
3.信号端输入电压1.8-7V;
4.单路工作电流1.5A,峰值电流可达2.5A,低待机电流 (小于 0.1uA);
5.内置防共态导通电路,输入端悬空时,电机不会误动作;
6.内置带迟滞效应的过热保护电路 (TSD),无需担心电机堵转;
7.产品尺寸: 24.7*21*5mm (长宽高),超小体积,适合组装和车载;
8.安装孔直径:2 mm。
9.重量:5g
部份代码:
#ifndef PID_H
#define PID_H
#include<stdint.h>
typedef struct PID
{
float target;
float integral;
float Kp; // 比例系数
float Ki; // 积分系数
float Kd; // 微分系数/Derivative
}pid_s, *pid_t;
void PID_Init(pid_t pid, float Kp, float Ki, float Kd);
int32_t PID_Cal(pid_s *p, float current, float differential);
#endif
/**********************************************HEAD FILES***************************************/
#include"BSP.H"
/************************************************************************************************
Name:main
Function:
main
Parameters:
void
Returns:
void
Description:
null
************************************************************************************************/
void SystemInit(){}//rewrite here
int main()
{
RCC_Configuration(); //initialize the system clock
USART_Configuration(); //initialize the usart
GPIO_Configuration();
NVIC_Configuration();
EXTI_Configuration();
PID_Init(&sPID, 300, 0, 0);
PWM_Motor_Configuration();
Cal_angle();
Heart_TIM();
InitMPU6050();
while(1)
{
}
}
#include "stm32f10x.h"
#include "delay.h"
//使用SysTick的普通计数模式对延迟进行管理
//修正了中断中调用出现死循环的错误
//防止延时不准确,采用do while结构!
static u8 fac_us=0;//us延时倍乘数
static u16 fac_ms=0;//ms延时倍乘数
/**********************************************************
** 函数名: delay_init
** 功能描述: 初始化延迟函数,SYSTICK的时钟固定为HCLK时钟的1/8
** 输入参数: SYSCLK(单位MHz)
** 输出参数: 无
** 调用方法:如果系统时钟被设为72MHz,则调用delay_init(72)
***********************************************************/
void delay_init(u8 SYSCLK)
{
SysTick->CTRL&=0xfffffffb;//bit2清空,选择外部时钟 HCLK/8
fac_us=SYSCLK/8;
fac_ms=(u16)fac_us*1000;
}
/**********************************************************
** 函数名: delay_us
** 功能描述: 延时nus,nus为要延时的us数.
** 输入参数: nus
** 输出参数: 无
***********************************************************/
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL=0x01; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
/**********************************************************
** 函数名: delay_ms
** 功能描述: 延时nms
** 输入参数: nms
** 输出参数: 无
** 说明:SysTick->LOAD为24位寄存器,所以,最大延时为:
nms<=0xffffff*8*1000/SYSCLK
SYSCLK单位为Hz,nms单位为ms
对72M条件下,nms<=1864
***********************************************************/
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
资料目录:
资源分享:
(佳作)两轮平衡小车(原理图、PCB、程序源码、BOM等)![]() https://download.csdn.net/download/xcltapestry/89413200
https://download.csdn.net/download/xcltapestry/89413200















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









