






一、首先建一个包
工作空间catkin_ws事先建好了,路径是/root/catkin_ws
然后运行以下命令在src文件夹下建立test包
$ cd ~/catkin_ws/src
$ catkin_create_pkg test roscpp
注意在包的名字后加上一些基本的依赖,比如roscpp和rospy这样就可以直接调用C++和python节点了,这将会在CMakeLists.txt中出现
find_package(catkin REQUIRED COMPONENTS roscpp)/*test1.cpp
*创建时间:2018.3.1
* 作者:向建平
*/
#include "ros/ros.h"
//ros/ros.h是一个实用的头文件,它引用了ROS系统中大部分常用的头文件
#include "std_msgs/String.h"
//std_msgs/String存放在std_msgs package里,由String.msg文件自动生成的头文件
#include <control_msgs/FollowJointTrajectoryAction.h>
#include <control_msgs/FollowJointTrajectoryActionGoal.h>
#include <control_msgs/FollowJointTrajectoryGoal.h>
#include <trajectory_msgs/JointTrajectory.h>
#include <trajectory_msgs/JointTrajectoryPoint.h>
//回调函数,当message topic消息到达后会调用此函数 control_msgs/FollowJointTrajectoryActionGoal
void execute(const control_msgs::FollowJointTrajectoryActionGoal::ConstPtr& msg)
{
std::cout << "points[0]: "
<< "[" << msg->goal.trajectory.points[0].positions[0]
<< "," << msg->goal.trajectory.points[0].positions[1]
<< "," << msg->goal.trajectory.points[0].positions[2]
<< "," << msg->goal.trajectory.points[0].positions[3]
<< "," << msg->goal.trajectory.points[0].positions[4]
<< "," << msg->goal.trajectory.points[0].positions[5]
<< "]" << std::endl ;
std::cout << "points[1]: "
<< "[" << msg->goal.trajectory.points[1].positions[0]
<< "," << msg->goal.trajectory.points[1].positions[1]
<< "," << msg->goal.trajectory.points[1].positions[2]
<< "," << msg->goal.trajectory.points[1].positions[3]
<< "," << msg->goal.trajectory.points[1].positions[4]
<< "," << msg->goal.trajectory.points[1].positions[5]
<< "]" << std::endl ;
std::cout << "points[2]: "
<< "[" << msg->goal.trajectory.points[2].positions[0]
<< "," << msg->goal.trajectory.points[2].positions[1]
<< "," << msg->goal.trajectory.points[2].positions[2]
<< "," << msg->goal.trajectory.points[2].positions[3]
<< "," << msg->goal.trajectory.points[2].positions[4]
<< "," << msg->goal.trajectory.points[2].positions[5]
<< "]" << std::endl ;
std::cout << "points[3]: "
<< "[" << msg->goal.trajectory.points[3].positions[0]
<< "," << msg->goal.trajectory.points[3].positions[1]
<< "," << msg->goal.trajectory.points[3].positions[2]
<< "," << msg->goal.trajectory.points[3].positions[3]
<< "," << msg->goal.trajectory.points[3].positions[4]
<< "," << msg->goal.trajectory.points[3].positions[5]
<< "]" << std::endl ;
std::cout << "points[4]: "
<< "[" << msg->goal.trajectory.points[4].positions[0]
<< "," << msg->goal.trajectory.points[4].positions[1]
<< "," << msg->goal.trajectory.points[4].positions[2]
<< "," << msg->goal.trajectory.points[4].positions[3]
<< "," << msg->goal.trajectory.points[4].positions[4]
<< "," << msg->goal.trajectory.points[4].positions[5]
<< "]" << std::endl ;
std::cout << "points[5]: "
<< "[" << msg->goal.trajectory.points[5].positions[0]
<< "," << msg->goal.trajectory.points[5].positions[1]
<< "," << msg->goal.trajectory.points[5].positions[2]
<< "," << msg->goal.trajectory.points[5].positions[3]
<< "," << msg->goal.trajectory.points[5].positions[4]
<< "," << msg->goal.trajectory.points[5].positions[5]
<< "]" << std::endl ;
std::cout << "points[6]: "
<< "[" << msg->goal.trajectory.points[6].positions[0]
<< "," << msg->goal.trajectory.points[6].positions[1]
<< "," << msg->goal.trajectory.points[6].positions[2]
<< "," << msg->goal.trajectory.points[6].positions[3]
<< "," << msg->goal.trajectory.points[6].positions[4]
<< "," << msg->goal.trajectory.points[6].positions[5]
<< "]" << std::endl ;
std::cout << "points[7]: "
<< "[" << msg->goal.trajectory.points[7].positions[0]
<< "," << msg->goal.trajectory.points[7].positions[1]
<< "," << msg->goal.trajectory.points[7].positions[2]
<< "," << msg->goal.trajectory.points[7].positions[3]
<< "," << msg->goal.trajectory.points[7].positions[4]
<< "," << msg->goal.trajectory.points[7].positions[5]
<< "]" << std::endl ;
std::cout << "points[8]: "
<< "[" << msg->goal.trajectory.points[8].positions[0]
<< "," << msg->goal.trajectory.points[8].positions[1]
<< "," << msg->goal.trajectory.points[8].positions[2]
<< "," << msg->goal.trajectory.points[8].positions[3]
<< "," << msg->goal.trajectory.points[8].positions[4]
<< "," << msg->goal.trajectory.points[8].positions[5]
<< "]" << std::endl ;
std::cout << "points[9]: "
<< "[" << msg->goal.trajectory.points[9].positions[0]
<< "," << msg->goal.trajectory.points[9].positions[1]
<< "," << msg->goal.trajectory.points[9].positions[2]
<< "," << msg->goal.trajectory.points[9].positions[3]
<< "," << msg->goal.trajectory.points[9].positions[4]
<< "," << msg->goal.trajectory.points[9].positions[5]
<< "]" << std::endl ;
}
int main(int argc, char **argv)
{
//初始化ROS,注意:名称必须唯一
ros::init(argc, argv, "test1");
//监听/arm_controller/follow_joint_trajectory/goal话题发布的消息
//设置节点进程句柄
ros::NodeHandle n;
//参数一为订阅的话题名称(/arm_controller/follow_joint_trajectory/goal);
//参数二是消息缓存队列,这里设置为1000,即缓存了1000个消息后,如果由新的消息到达,则开始丢弃先前接收的消息;
//参数三为当收到消息后调用的函数名称(execute)
ros::Subscriber sub = n.subscribe("/arm_controller/follow_joint_trajectory/goal", 1000, execute);
//ros::spin()进入自循环,可以尽可能快的调用消息回调函数
ros::spin();
return 0;
} 注意:这个cpp输出的是弧度制的角度,如果需要角度值需要转换,用下面的cpp
/*test1.cpp
*创建时间:2018.3.1
* 作者:向建平
*/
#include "ros/ros.h"
//ros/ros.h是一个实用的头文件,它引用了ROS系统中大部分常用的头文件
#include "std_msgs/String.h"
#include <angles/angles.h> //角度转换的头文件
#include <cmath>
//std_msgs/String存放在std_msgs package里,由String.msg文件自动生成的头文件
#include <control_msgs/FollowJointTrajectoryAction.h>
#include <control_msgs/FollowJointTrajectoryActionGoal.h>
#include <control_msgs/FollowJointTrajectoryGoal.h>
#include <trajectory_msgs/JointTrajectory.h>
#include <trajectory_msgs/JointTrajectoryPoint.h>
//回调函数,当message topic消息到达后会调用此函数 control_msgs/FollowJointTrajectoryActionGoal
void execute(const control_msgs::FollowJointTrajectoryActionGoal::ConstPtr& msg)
{
std::cout << "points[0]: "
<< "[" << (msg->goal.trajectory.points[0].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[0].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[0].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[0].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[0].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[0].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[1]: "
<< "[" << (msg->goal.trajectory.points[1].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[1].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[1].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[1].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[1].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[1].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[2]: "
<< "[" << (msg->goal.trajectory.points[2].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[2].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[2].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[2].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[2].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[2].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[3]: "
<< "[" << (msg->goal.trajectory.points[3].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[3].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[3].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[3].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[3].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[3].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[4]: "
<< "[" << (msg->goal.trajectory.points[4].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[4].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[4].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[4].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[4].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[4].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[5]: "
<< "[" << (msg->goal.trajectory.points[5].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[5].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[5].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[5].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[5].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[5].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[6]: "
<< "[" << (msg->goal.trajectory.points[6].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[6].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[6].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[6].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[6].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[6].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[7]: "
<< "[" << (msg->goal.trajectory.points[7].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[7].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[7].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[7].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[7].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[7].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[8]: "
<< "[" << (msg->goal.trajectory.points[8].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[8].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[8].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[8].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[8].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[8].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
std::cout << "points[9]: "
<< "[" << (msg->goal.trajectory.points[9].positions[0]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[9].positions[1]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[9].positions[2]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[9].positions[3]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[9].positions[4]) * 180.0 / M_PI
<< "," << (msg->goal.trajectory.points[9].positions[5]) * 180.0 / M_PI
<< "]" << std::endl ;
}
int main(int argc, char **argv)
{
//初始化ROS,注意:名称必须唯一
ros::init(argc, argv, "test1");
//监听/arm_controller/follow_joint_trajectory/goal话题发布的消息
//设置节点进程句柄
ros::NodeHandle n;
//参数一为订阅的话题名称(/arm_controller/follow_joint_trajectory/goal);
//参数二是消息缓存队列,这里设置为1000,即缓存了1000个消息后,如果由新的消息到达,则开始丢弃先前接收的消息;
//参数三为当收到消息后调用的函数名称(execute)
ros::Subscriber sub = n.subscribe("/arm_controller/follow_joint_trajectory/goal", 1000, execute);
//ros::spin()进入自循环,可以尽可能快的调用消息回调函数
ros::spin();
return 0;
} 三、编写CMakeLists.txt文件
这里仅仅在自动生成的CMakeLists.txt文件后面加了以下两句话,并没有额外添加什么依赖
add_executable(test1 src/test1.cpp)
target_link_libraries(test1 ${catkin_LIBRARIES})四、编译
$ cd ~/catkin_ws
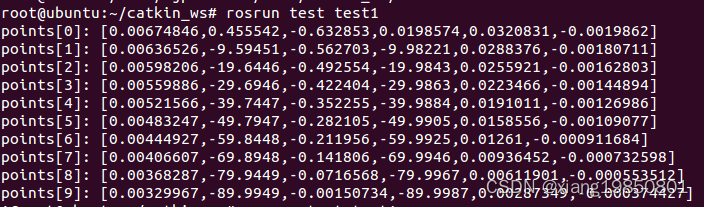
$ catkin_make --pkg test执行编译完成后运行该节点就行了
$ rosrun test test1当在rviz中用moveit设置一个目标姿态,然后plan and execute的时候,/arm_controller/follow_joint_trajectory/goal这个地方就有路径数据出来了,我们编写的这个test1节点就可以截获到数据了。















 3356
3356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









