







机器人算法SLAM
小狼@http://blog.csdn.net/xiaolangyangyang
openslam_gmapping源码分析
代码整体流程
openslam_gmapping核心函数是processScan(),其中主要包括drawFromMotion()、scanMatch()和resample()三个操作。
问题
1、为什么加入drawFromMotion()函数:
gmapping采用粒子滤波器算法,drawFromMotion()函数将所有粒子在odom坐标的基础上加入高斯白噪声,即所谓的放狗过程。
2、scanMatch()做了什么:
scanMatch()函数采用NDT算法对当前坐标的激光束和每个粒子各自维护的map进行匹配,对粒子坐标进行前后左右左转右转微调,再给出匹配得分。
3、resample()是怎么进行重采样的:
resample()选出NDT算法匹配得分满足要求的粒子,将所有粒子坐标全部移动到这部分粒子上。
4、全局地图是如何生成的:
gmapping把粒子历史坐标和历史激光数据保存在TNode构成的树形结构中,该树形结构的每一层的节点都是NDT算法匹配满足要求的节点(高匹配权重),选择最末端最优粒子(匹配权重最高)相应的TNode节点,逐级向上获取坐标信息和激光信息,生成全局地图。
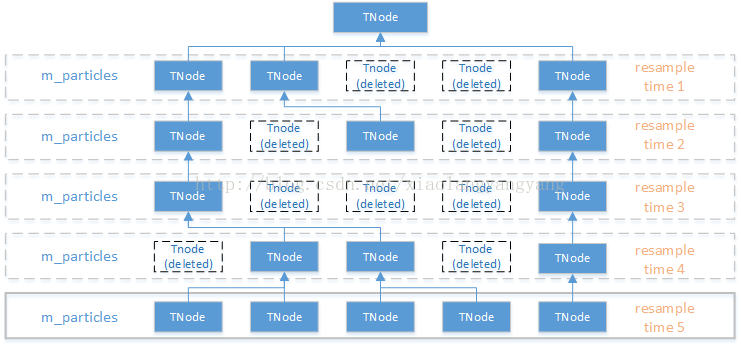
TNode树形结构图

resample()构建TNode过程

processScan()处理过程(红色为粒子二位空间分布)

















 3611
3611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









