






lsusb
查看设备

找到ID 后面的idProduct与idVendor
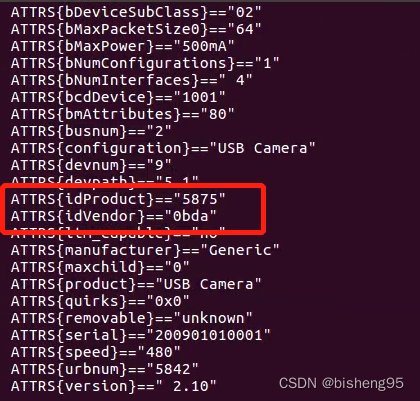
udevadm info --attribute-walk --name=/dev/video0
查看设备详细信息,idProduct与idVendor与第一步找打的一致
sudo gedit /etc/udev/rules.d/usb.rules 进行绑定
KERNEL=="video*", ATTRS{idVendor}=="0bda", ATTRS{idProduct}=="5875", MODE:="0777", ATTRS{devpath}=="5.1", SYMLINK+="people_video"

4.输入指令生效:
sudo udevadm control --reload-rules
sudo udevadm trigger
-
查看效果:
ls -l /dev |grep video















 3249
3249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









