







现代控制理论基础总结(线性部分)
学习现代控制理论也有两个月的时间了,里面涉及的基础内容和公式十分之多,所以现在对各部分基础知识作一个总结。
1、控制系统的状态表达式
在现代控制理论中,状态空间这是基础,如何从日常生活中系统推导出状态空间表达式十分重要。
1.1、从实际系统建立状态空间方程
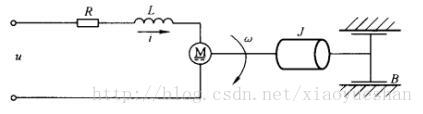
上图是一个直流电机的示意图,图中R,L为电枢回路的电阻和电感,J为旋转机械部分转动惯量,B为旋转部分粘性摩擦系数
建立状态方程首先要选取独立的系统变量,这里选取电流i和旋转速度w,即:

上述动力学方程是基于转矩平衡方程得出,
Jdwt
为电机转动力矩,
Bw
为负载力矩,
Kai
为电机输出力矩。
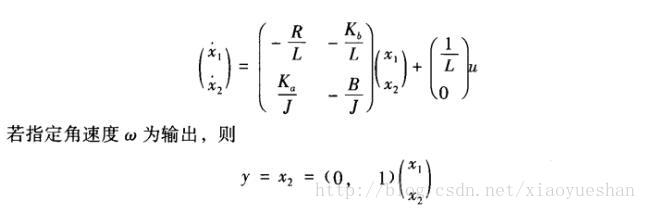
所以将
x1=i,x2=w
代入上式可得:
1.2、从n阶微分方程建立状态方程
引用现代控制理论中的公式:

我们知道状态方程的标准形式如下:

式1.19中
当
m<n
时,状态方程中
D=0
;
当
m=n
时,状态方程中
D=bm≠0
;
1.2.1、传递函数没有零点时的实现
例:对于下式微分方程
y...+6y¨+41y˙+7y=6u
选取独立变量 y/6 , y˙/6 , y¨/6 ,即 x1=y/6 , x2=y˙/6 , x3=y¨/6
因此有:
x˙1=y˙/6=x2
x˙2=y¨/6=x3
x˙3=y.../6=−7x1−41x2−6x3+u
可得矩阵方程:
⎡⎣⎢x˙1x˙2x˙3⎤⎦⎥=⎡⎣⎢00−710−4101−6⎤⎦⎥⎡⎣⎢x1x2x3⎤⎦⎥+⎡⎣⎢001⎤⎦⎥u
输出矩阵:
y=6x1=[600]⎡⎣⎢x1x2x3⎤⎦⎥
1.2、状态变量的线性变换(坐标变换)
对于原状态矢量
x
,总是可以找到非奇异矩阵
即:
将上式代入状态方程可得:

1.2.1、非奇异矩阵 T 求解
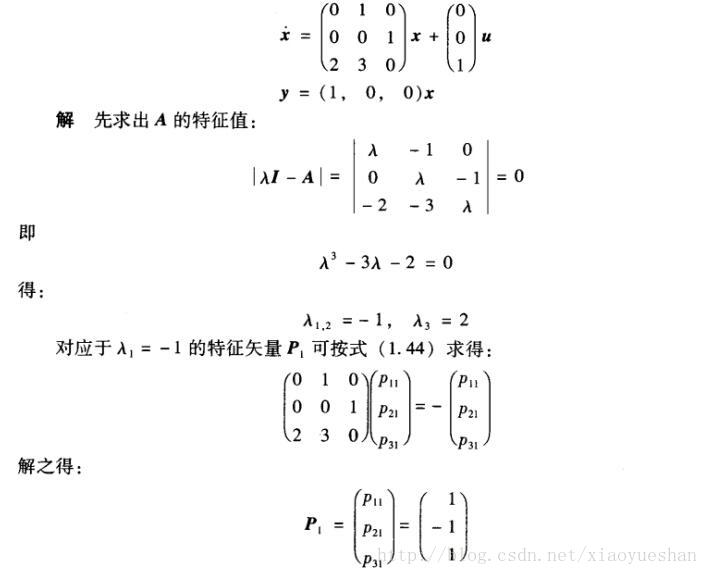
1、求系统特征值
对于系统
可知其特征方程:
存在特征矢量方程:
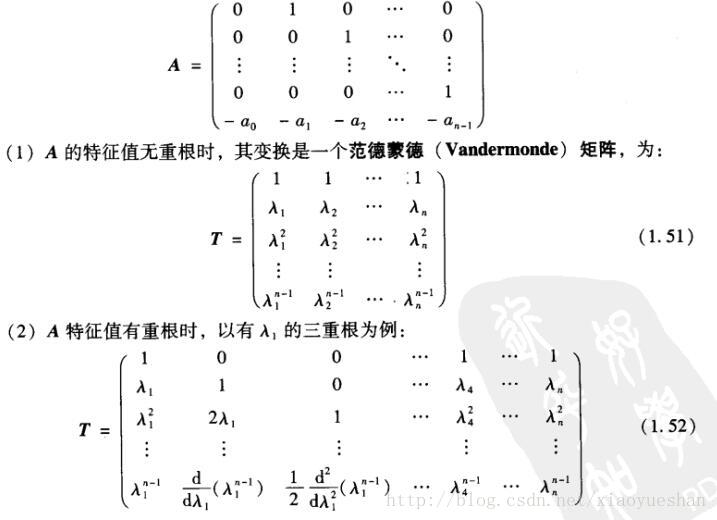
1)当特征值 λ 不存在重根时
λiPi=APi
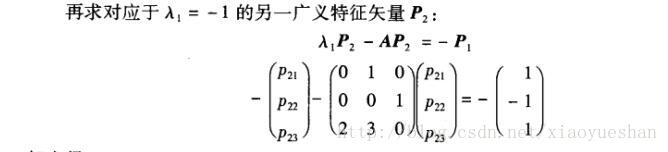
2)当特征值 λ 存在重根时
λi−1Pi−APi=−Pi−1
因此当A是3阶矩阵时得:
T=[P1P2P3]
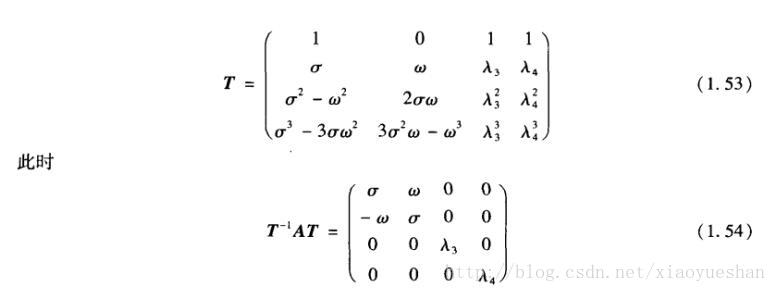
2、系统为约旦标准型

注意上式中J=A中A并非原状态方程A,存在等式:

即 J=T−1AT
例如以下例题:
P3 和 P1 求法相同,可得T:

自然约旦方程的各个系数就可以根据T求出。
3、系统A为标准型
















 576
576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









