







重点概念
1. 矩阵指数与状态空间方程的解
状态空间方程的解可以用矩阵指数来描述。矩阵指数形如:
x
(
t
)
=
e
A
(
t
−
t
0
)
x
0
x\left( t \right) =e^{A\left( t-t_0 \right)}x_0
x(t)=eA(t−t0)x0
矩阵指数的展开式为幂级数:
e
A
t
=
I
+
A
t
+
1
2
!
A
2
t
2
+
.
.
.
+
1
k
!
A
k
t
k
e^{At}=\boldsymbol{I}+\boldsymbol{A}t+\frac{1}{2!}\boldsymbol{A}^2t^2+...+\frac{1}{k!}\boldsymbol{A}^kt^k
eAt=I+At+2!1A2t2+...+k!1Aktk
矩阵指数的意义:只要指导了矩阵指数,给定初值和时间,可以求解计算得到所有的状态值。因此矩阵指数描述了状态的转移特征。
矩阵指数的计算方法: 定义法、特征值法、拉普拉斯变换法。
状态转移矩阵也经常写成:
Φ
(
t
)
=
e
A
t
\varPhi \left( t \right) =e^{\boldsymbol{A}t}
Φ(t)=eAt
关键应用:
通过对矩阵A进行非奇异变换,予以对角化,从而为求解状态转移矩阵提供了便利。(证明方法:矩阵指数的幂级数定义法)
T
−
1
A
T
=
Λ
e
A
t
=
T
[
e
λ
1
t
.
.
.
e
λ
2
t
]
T
−
1
\boldsymbol{T}^{-1}\boldsymbol{AT}=\boldsymbol{\varLambda } \\ \boldsymbol{e}^{\boldsymbol{A}t}=\boldsymbol{T}\left[ \begin{matrix} e^{\lambda _1t}& & \\ & ...& \\ & & e^{\lambda _2t}\\ \end{matrix} \right] \boldsymbol{T}^{-1}
T−1AT=ΛeAt=T
eλ1t...eλ2t
T−1
因此该方法时现代控制理论中非常重要的方法,涉及矩阵指数的定义、特征根的计算、特征向量的计算。
例:采用特征值方法计算矩阵指数。
设:
A
=
[
0
1
−
2
−
3
]
A=\left[ \begin{matrix} 0& 1\\ -2& -3\\ \end{matrix} \right]
A=[0−21−3]
计算如下:
根据:
∣
λ
I
−
A
∣
=
0
得
:
∣
λ
−
1
2
λ
+
3
∣
=
0
即:
λ
(
λ
+
3
)
+
2
=
0
得到:
λ
1
=
−
1
,
λ
2
=
−
2
当
λ
1
=
−
1
,
−
2
计算特征向量:
[
0
1
−
2
−
3
]
[
1
p
1
]
=
−
1
[
1
p
1
]
⟹
p
1
=
−
1
[
0
1
−
2
−
3
]
[
1
p
2
]
=
−
2
[
1
p
2
]
⟹
p
2
=
−
2
因此特征向量:
T
1
=
[
1
1
−
1
−
2
]
,
T
1
−
1
=
[
2
1
−
1
−
1
]
因此可得矩阵指数为:
Φ
(
t
)
=
[
1
1
−
1
−
2
]
[
e
−
t
0
0
e
−
2
t
]
[
2
1
−
1
−
1
]
Φ
(
t
)
=
[
e
−
t
e
−
2
t
−
e
−
t
−
2
e
−
2
t
]
[
2
1
−
1
−
1
]
Φ
(
t
)
=
[
2
e
−
t
−
e
−
2
t
e
−
t
−
e
−
2
t
−
2
e
−
t
+
2
e
−
2
t
−
e
−
t
+
2
e
−
2
t
]
虽然特征向量不同,但是计算得到得状态转移矩阵相同。
\text{根据:}|\lambda I-A|=0 \\ \text{得}:\left| \begin{matrix} \lambda& -1\\ 2& \lambda +3\\ \end{matrix} \right|=0 \\ \text{即:}\lambda \left( \lambda +3 \right) +2=0 \\ \text{得到:}\lambda _1=-1\text{,}\lambda _2=-2 \\ \text{当}\lambda _1=-1\text{,}-2 \text{计算特征向量:} \\ \left[ \begin{matrix} 0& 1\\ -2& -3\\ \end{matrix} \right] \left[ \begin{array}{c} 1\\ p_1\\ \end{array} \right] =-1\left[ \begin{array}{c} 1\\ p_1\\ \end{array} \right] \Longrightarrow p_1=-1 \\ \left[ \begin{matrix} 0& 1\\ -2& -3\\ \end{matrix} \right] \left[ \begin{array}{c} 1\\ p_2\\ \end{array} \right] =-2\left[ \begin{array}{c} 1\\ p_2\\ \end{array} \right] \Longrightarrow p_2=-2 \\ \text{因此特征向量:} \\ T_1=\left[ \begin{matrix} 1& 1\\ -1& -2\\ \end{matrix} \right] \text{,}T_{1}^{-1}=\left[ \begin{matrix} 2& 1\\ -1& -1\\ \end{matrix} \right] \\ \text{因此可得矩阵指数为:} \\ \varPhi \left( t \right) =\left[ \begin{matrix} 1& 1\\ -1& -2\\ \end{matrix} \right] \left[ \begin{matrix} e^{-t}& 0\\ 0& e^{-2t}\\ \end{matrix} \right] \left[ \begin{matrix} 2& 1\\ -1& -1\\ \end{matrix} \right] \\ \varPhi \left( t \right) =\left[ \begin{matrix} e^{-t}& e^{-2t}\\ -e^{-t}& -2e^{-2t}\\ \end{matrix} \right] \left[ \begin{matrix} 2& 1\\ -1& -1\\ \end{matrix} \right] \\ \varPhi \left( t \right) =\left[ \begin{matrix} 2e^{-t}-e^{-2t}& e^{-t}-e^{-2t}\\ -2e^{-t}+2e^{-2t}& -e^{-t}+2e^{-2t}\\ \end{matrix} \right] \\ \text{虽然特征向量不同,但是计算得到得状态转移矩阵相同。}
根据:∣λI−A∣=0得:
λ2−1λ+3
=0即:λ(λ+3)+2=0得到:λ1=−1,λ2=−2当λ1=−1,−2计算特征向量:[0−21−3][1p1]=−1[1p1]⟹p1=−1[0−21−3][1p2]=−2[1p2]⟹p2=−2因此特征向量:T1=[1−11−2],T1−1=[2−11−1]因此可得矩阵指数为:Φ(t)=[1−11−2][e−t00e−2t][2−11−1]Φ(t)=[e−t−e−te−2t−2e−2t][2−11−1]Φ(t)=[2e−t−e−2t−2e−t+2e−2te−t−e−2t−e−t+2e−2t]虽然特征向量不同,但是计算得到得状态转移矩阵相同。
通过上述例子复习了矩阵特征值、特征向量、矩阵指数的计算。
2. 线性定常非齐次微分方程的解
理论公式:
x
(
t
)
=
e
A
t
x
(
0
)
+
∫
0
t
e
A
(
t
−
τ
)
B
u
(
τ
)
d
τ
\boldsymbol{x}\left( t \right) =e^{\boldsymbol{A}t}\boldsymbol{x}\left( 0 \right) +\int_0^t{e^{\boldsymbol{A}\left( t-\tau \right)}}\boldsymbol{Bu}\left( \tau \right) d\tau
x(t)=eAtx(0)+∫0teA(t−τ)Bu(τ)dτ
以下式为例,练习线性定常非齐次微分方程的解:
x
˙
=
[
0
1
−
2
−
3
]
x
+
[
0
1
]
u
,计算状态方程的解
x
(
t
)
=
[
2
e
−
t
−
e
−
2
t
e
−
t
−
e
−
2
t
−
2
e
−
t
+
2
e
−
2
t
−
e
−
t
+
2
e
−
2
t
]
x
(
0
)
+
∫
0
t
[
e
−
(
t
−
τ
)
−
e
−
2
(
t
−
τ
)
−
e
−
(
t
−
τ
)
+
2
e
−
2
(
t
−
τ
)
]
d
τ
第一项计算略
,
上式第二项计算:
∫
0
t
[
e
−
(
t
−
τ
)
−
e
−
2
(
t
−
τ
)
−
e
−
(
t
−
τ
)
+
2
e
−
2
(
t
−
τ
)
]
d
τ
=
[
∫
0
t
e
−
(
t
−
τ
)
−
e
−
2
(
t
−
τ
)
d
τ
∫
0
t
−
e
−
(
t
−
τ
)
+
2
e
−
2
(
t
−
τ
)
d
τ
]
=
[
1
2
e
−
2
t
−
e
−
t
+
1
2
e
−
t
−
e
−
2
t
]
\dot{x}=\left[ \begin{matrix} 0& 1\\ -2& -3\\ \end{matrix} \right] x+\left[ \begin{array}{c} 0\\ 1\\ \end{array} \right] u\text{,计算状态方程的解} \\ \boldsymbol{x}\left( t \right) =\left[ \begin{matrix} 2e^{-t}-e^{-2t}& e^{-t}-e^{-2t}\\ -2e^{-t}+2e^{-2t}& -e^{-t}+2e^{-2t}\\ \end{matrix} \right] \boldsymbol{x}\left( 0 \right) +\int_0^t{\left[ \begin{array}{c} e^{-\left( t-\tau \right)}-e^{-2\left( t-\tau \right)}\\ -e^{-\left( t-\tau \right)}+2e^{-2\left( t-\tau \right)}\\ \end{array} \right]}d\tau \\ \text{第一项计算略},\text{上式第二项计算:} \\ \int_0^t{\left[ \begin{array}{c} e^{-\left( t-\tau \right)}-e^{-2\left( t-\tau \right)}\\ -e^{-\left( t-\tau \right)}+2e^{-2\left( t-\tau \right)}\\ \end{array} \right]}d\tau =\left[ \begin{array}{c} \int_0^t{e^{-\left( t-\tau \right)}-e^{-2\left( t-\tau \right)}d\tau}\\ \int_0^t{-e^{-\left( t-\tau \right)}+2e^{-2\left( t-\tau \right)}d\tau}\\ \end{array} \right] =\left[ \begin{array}{c} \frac{1}{2}e^{-2t}-e^{-t}+\frac{1}{2}\\ e^{-t}-e^{-2t}\\ \end{array} \right]
x˙=[0−21−3]x+[01]u,计算状态方程的解x(t)=[2e−t−e−2t−2e−t+2e−2te−t−e−2t−e−t+2e−2t]x(0)+∫0t[e−(t−τ)−e−2(t−τ)−e−(t−τ)+2e−2(t−τ)]dτ第一项计算略,上式第二项计算:∫0t[e−(t−τ)−e−2(t−τ)−e−(t−τ)+2e−2(t−τ)]dτ=[∫0te−(t−τ)−e−2(t−τ)dτ∫0t−e−(t−τ)+2e−2(t−τ)dτ]=[21e−2t−e−t+21e−t−e−2t]
3. 能控性和能观性
能控性定义: 如果存在一个分段连续的输入u(t),能在有限时间区间内,时系统由某一个初始状态x(t0),转移到任一终端状态,则称此状态是能控的。若系统的所有状态都是能控的,则称系统为状态完全能控的。
能控性的理解:1. 标量微分方程的理解方式,如果标量微分方程包含输入u(t)项,则该状态受输入控制,否则该状态不受控;2. 在状态平面内,受控状态变量表现为状态子空间的形式;3. 在系统状态框图中,受控状态与输入有所练习;
能控性与什么有关:与系统矩阵的形式有关、与输入的作用点(输入矩阵B)有关。
对角标准型:当系统状态描述为对角标准型时,若输入矩阵有一项为0,则该项对应的状态不受控,表现为,该状态的自由衰减响应,同时不受其他状态变量的影响;
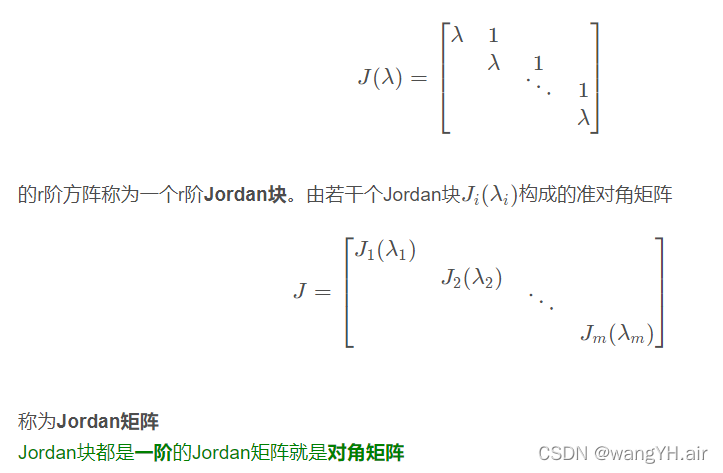
约当标准型:当系统为约当标准型时,系统的状态总是受下一个状态影响,因此只要最后一项状态受输入控制,则所有的状态都可以受控;约当标准型形如:
第二种判断方法:直接通过AB阵判断
以下的能控性矩阵满秩: M = ( b A b A 2 b A 3 b , . . . , A n − 1 b ) M=\left( b\,\,Ab\,\,A^2b\,\,A^3b,... ,A^{n-1}b \right) M=(bAbA2bA3b,...,An−1b)
4. 连续时间线性时不变系统的离散化
参考:线性系统理论(第2版)-郑大钟 p122页;
x
˙
=
A
x
+
B
u
y
=
C
x
+
D
u
表示为离散化形式:
{
x
(
k
+
1
)
=
G
x
(
k
)
+
H
u
(
k
)
y
(
k
)
=
C
x
(
k
)
+
D
u
(
k
)
G
=
e
A
T
H
=
(
∫
0
T
e
A
T
d
t
)
B
\dot{x}=Ax+Bu \\ y=Cx+Du \\表示为离散化形式: \begin{cases} x\left( k+1 \right) =Gx\left( k \right) +Hu\left( k \right)\\ y\left( k \right) =Cx\left( k \right) +Du\left( k \right)\\ \end{cases} \\ G=e^{AT} \\ H=\left( \int_0^T{e^{AT}dt} \right) B
x˙=Ax+Buy=Cx+Du表示为离散化形式:{x(k+1)=Gx(k)+Hu(k)y(k)=Cx(k)+Du(k)G=eATH=(∫0TeATdt)B
5. 状态变量分析法
参考:状态变量法及其应用-陈屏
传递函数法,又称端部法。
查漏补缺
- 矩阵指数展开为幂级数的证明
- 离散时间状态空间方程的求解方法
- 线性变换不改变系统的能控性原因















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









