






 该博客介绍了使用N次多项式连接多个点进行轨迹生成的方法,重点探讨了最小冲量(Minimum Jerk 和 Minimum Snap)的概念。通过构建代价函数和约束条件,将问题转化为二次规划(QP)问题,然后利用MATLAB求解。代码示例展示了从输入点计算轨迹的完整流程,包括计算时间间隔、构造成本函数、微分约束和连续性约束,最终生成平滑轨迹。
该博客介绍了使用N次多项式连接多个点进行轨迹生成的方法,重点探讨了最小冲量(Minimum Jerk 和 Minimum Snap)的概念。通过构建代价函数和约束条件,将问题转化为二次规划(QP)问题,然后利用MATLAB求解。代码示例展示了从输入点计算轨迹的完整流程,包括计算时间间隔、构造成本函数、微分约束和连续性约束,最终生成平滑轨迹。
1、简介
使用N次多项式连接(M+1)个点完成轨迹生成。
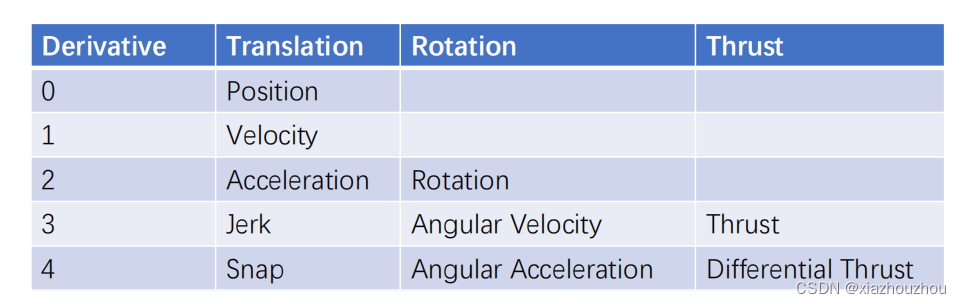
Minimum Jerk:N=5 ;Minimum Snap:N=7
多项式的形式:
其 k 阶微分:
构建起的所有cost function和约束都和上面两个密切相关。
2、QP问题
waypoints数:M+1
segment数:M
每个segment多项式阶数:N
每个segment多项式未知数个数:N+1
每个segment的时间段:
Snap阶数:K=4
1)、cost function
Minimum Snap:
定义欧式距离:
对于每一段的代价函数:
写成矩阵乘法:
其中:Pj为size(N+1,1) Qj为size(N+1,N+1)
对于所有段的代价函数:
其中:
注: 分块矩阵matlab命令为:blkdiag
2)、Derivate Constraint
包括:整个轨迹首、末两点的 0阶到 k-1阶 微分必须等于给定的值 和
每段轨迹 首、末两点的 0 阶微分必须等于waypoints的值。 (0阶即为位置)
实现方法:
一般约束:
对于每一段:
额外的约束:
对于第一段:0时刻满足当前点的K阶微分约束
对于最后一段:T时刻满足当前点的K阶微分约束
上述两个约束很容易合写为:
其中:
3)、Continuity Constraint
中间点(即每段的连接点)需要满足 K-1 阶微分的连续
即:
写成矩阵形式为:
总的约束矩阵为:
其中:B为上三角阶梯矩阵:其形式如下:
4)、典型的QP问题
综上:
合并为:
matlab 解决QP问题:help quadprog
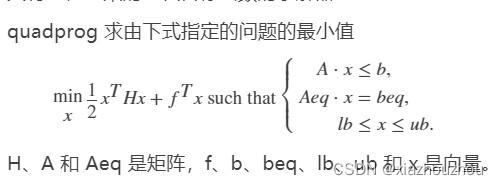
即可求解。
3、MATLAB代码
框架如下:运行MiniSnap即可,ginput鼠标左键选取数个点后回车即可运行。
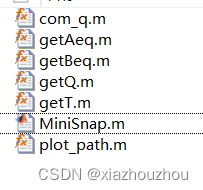
1、MiniSnap.m主函数
clear;close all;clc;
path=ginput()*100;
close all;
figure;
plot(path(:,1),path(:,2),"r*");
hold on
plot(path(:,1),path(:,2),"b");
axis([0 100 0 100]);
hold on
pathX=path(:,1);
pathY=path(:,2);
M=length(path)-1; % m+1个waypoints m段
N=7; %7阶多项式
K=4; %minimum snap的阶数
P=M*(N+1) %未知数个数
N_derivate=M*K*2 %微分约束方程个数:行数
N_continuy=(M-1)*K %连续约束方程个数:行数
T=getT(path,M); %算总时间
T_factor=max(T);
T=T/T_factor;
qX=com_q(N,K,T,M,pathX);
qY=com_q(N,K,T,M,pathY);
plot_path(qX,qY,M,T,N)2、getQ.m 获取Q矩阵
function Q=getQ(N,K,T,M)
% T=size(M,1)
% blkdiag 分块对角矩阵
Q_bais=zeros(N+1);
for j=1:M
for i=1:N+1
for l=1:N+1
if i<K+1 || l<K+1
Q_bais(l,i)=0;
else
Q_bais(l,i)=i*(i-1)*(i-2)*(i-3)*l*(l-1)*(l-2)*(l-3)/(i+l-7)*T(j)^(i+l-7);
end
end
Q_extend(:,:,j)=Q_bais;
end
end
Q=zeros((N+1)*M);
% 分块对角矩阵
index=0;
for j=1:M
for i=1:N+1
for l=1:N+1
Q(i+index,l+index)=Q_extend(i,l,j);
end
end
index=index+N+1;
end
Q(isnan(Q))=0;
3、getT.m 获取T向量
使用梯形速度获取大致的每段时间。
function T=getT(path,M)
% 梯形加速
T=zeros(M,1);
V_max=10;
a_max=10;
x_max=a_max*(V_max/a_max)^2;
t_slip=(V_max/a_max)*2;
for j=1:M
L=sqrt((path(j,1)-path(j+1,1))^2+(path(j,2)-path(j+1,2))^2); %sqrt(dx^2+dy^2)
if L>=x_max
T(j)=t_slip+(L-x_max)/V_max;
else
T(j)=sqrt(L/a_max);
end
end
4、getAeq.m
得到Derivate Constraint矩阵
function [A,Aeq]=getAeq(path,K,N,M,T)
% waypoints 的 [1-th ... (k-1)-th] 连续
% 0的阶乘为1
% B的维度为 (m-1)*m
% j的尾和j+1的首
A_j_0=zeros(K,N+1); % K阶最小snap,则 0th-(K-1)th总共K个已知或连续
A_j_Tj=zeros(K,N+1); % K个数
Aeq=[ ];
A=[ ];
m_index=0; %行
n_index=0; %列
A=zeros(K*M,(N+1)*M); % A的维度
for j=1:M
%初始化
Aeq_bais_0=zeros(K,1); %up :segment的首
Aeq_bais_Tj=zeros(K,1); %down :segment的尾
Aeq_bais_0(1)=path(j); %首点0阶 t=0
Aeq_bais_Tj(1)=path(j+1); %尾点0阶 t=Tj
Aeq=[Aeq;Aeq_bais_0;Aeq_bais_Tj];
T_end=T(j);
T_begin=0;
%初始化
A_j_0=zeros(K,N+1);
A_j_Tj=zeros(K,N+1);
% j段的首
if j==1
for m=0:K-1 % m阶连续/相等 k
for n=m:N % n阶对应的系数 i
A_j_0(m+1,n+1)=factorial(n)/factorial(n-m)*T_begin^(n-m);
end
end
else
m=0;
for n=m:N % n阶对应的系数 i
A_j_0(m+1,n+1)=factorial(n)/factorial(n-m)*T_begin^(n-m);
end
end
% j段的尾
if j==M
for m=0:K-1 % m阶连续/相等 k
for n=m:N % n阶对应的系数 i
A_j_Tj(m+1,n+1)=factorial(n)/factorial(n-m)*T_end^(n-m);
end
end
else
m=0;
for n=m:N % n阶对应的系数 i
A_j_Tj(m+1,n+1)=factorial(n)/factorial(n-m)*T_end^(n-m);
end
end
% A=diag([Aj])
for m=1:K
for n=1:N+1
A(m+m_index,n+n_index)=A_j_0(m,n);
A(m+m_index+K,n+n_index)=A_j_Tj(m,n);
end
end
m_index=m_index+2*K;
n_index=n_index+N+1;
end
5、getBeq.m
Continuity Constraint矩阵
function [B,Beq]=getBeq(K,N,M,T)
% waypoints 的 [1-th ... (k-1)-th] 连续
% 0的阶乘为1
% B的维度为 (m-1)*m
% j的尾和j+1的首
A_j1_0=zeros(K,N+1); % K阶最小snap,则 0th-(K-1)th总共K个已知或连续
A_j_Tj=zeros(K,N+1); % K个数
Aeq=[ ];
A=[ ];
m_index=0; %行
n_index=0; %列
A=zeros(K*(M-1),(N+1)*M); % A的维度
for j=1:M-1
%初始化
Aeq_bais_0=zeros(K,1); %up :segment的首
Aeq=[Aeq;Aeq_bais_0];
T_end=T(j);
T_begin=0;
%初始化
A_j1_0=zeros(K,N+1);
A_j_Tj=zeros(K,N+1);
% j段的尾
for m=0:K-1 % m阶连续/相等 k
for n=m:N % n阶对应的系数 i
A_j_Tj(m+1,n+1)=factorial(n)/factorial(n-m)*T_end^(n-m);
end
end
% j+1段的首
for m=0:K-1 % m阶连续/相等 k
for n=m:N % n阶对应的系数 i
A_j1_0(m+1,n+1)=factorial(n)/factorial(n-m)*T_begin^(n-m);
end
end
for m=1:K
for n=1:N+1
A(m+m_index,n+n_index)=A_j_Tj(m,n);
A(m+m_index,n+n_index+N+1)=-A_j1_0(m,n);
end
end
m_index=m_index+K;
n_index=n_index+N+1;
end
B=A;
Beq=Aeq;6、com_q.m
x,y两个维度独立求解各自的qp问题
function q=com_q(N,K,T,M,pathX)
Q=getQ(N,K,T,M);
[A,Aeq]=getAeq(pathX,K,N,M,T);
[B,Beq]=getBeq(K,N,M,T);
A_total=[A;B];
Deq_total=[Aeq;Beq];
q=quadprog(Q,[],[],[],A_total,Deq_total);7、plot_path.m
画图函数
function plot_path(qX,qY,M,T,N)
Roll=N+1;
qX=reshape(qX,Roll,M); %每一列代表一段的qX
qY=reshape(qY,Roll,M); %每一列代表一段的qX
%figure
hold on
for j=1:M
qXj=qX(:,j);
qYj=qY(:,j);
Tj=T(j);
index=0;
for t=0:0.001:Tj
index=index+1;
time(index)=t;
t_exp=zeros(N+1,1);
for n=0:N
t_exp(n+1)=t^(n);
end
x(index)=qXj'*t_exp;
y(index)=qYj'*t_exp;
end
plot(x,y,"r.")
hold on
end
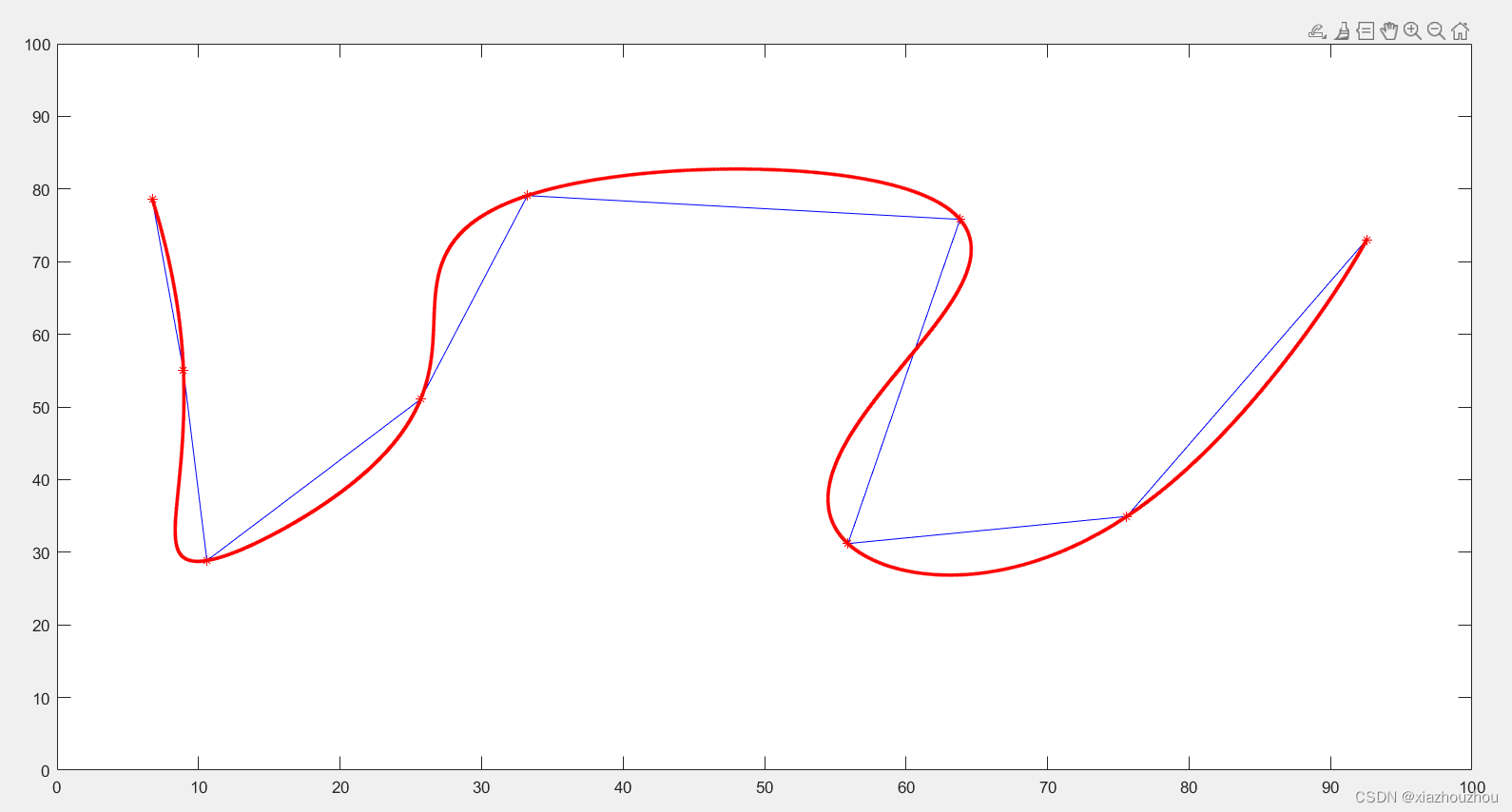
hold off8、运行结果:

















 775
775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









