







 本文详细介绍Faster R-CNN算法原理,包括RPN网络结构、anchor机制及联合训练过程。RPN网络通过3*3卷积层生成候选区域,使用多尺度anchor提升检测精度。通过交替训练方式实现RPN与Fast-RCNN参数共享。
本文详细介绍Faster R-CNN算法原理,包括RPN网络结构、anchor机制及联合训练过程。RPN网络通过3*3卷积层生成候选区域,使用多尺度anchor提升检测精度。通过交替训练方式实现RPN与Fast-RCNN参数共享。
论文:《Faster R-CNN: Towards Real-Time ObjectDetection with Region Proposal Networks》
摘要:算法主要解决两个问题:
1、提出区域建议网络RPN,快速生成候选区域;
2、通过交替训练,使RPN和Fast-RCNN网络共享参数。
一、 RPN网络结构
RPN网络的作用是输入一张图像,输出一批矩形候选区域,类似于以往目标检测中的Selective Search一步。网络结构是基于卷积神经网络,但输出包含二类softmax和bbox回归的多任务模型。网络结果如下(以ZF网络为参考模型):
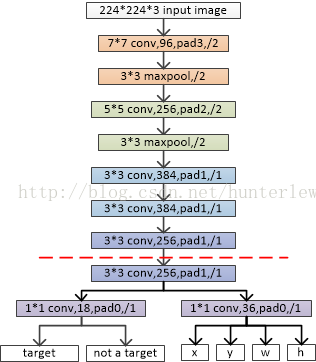
其中,虚线以上是ZF网络最后一层卷积层前的结构,虚线以下是RPN网络特有的结构。首先是3*3的卷积,然后通过1*1卷积输出分为两路,其中一路输出是目标和非目标的概率,另一路输出box相关的四个参数,包括box的中心坐标x和y,box宽w和长h。
(至于之前为什么要用3*3的卷积核,我觉得是和感受野大小相对应的。在原来的ZF模型中,3*3卷积核对应map比例是3/13,相当于在型如1000*600的图片中采用180左右的感受野。对于1000*600的图片中大部分目标而言,这个大小的感受野是比较合适的吧。)
从卷积运算本身而言,卷积相当于滑窗。假如输入图像是1000*600,则经过了几次stride后,map大小缩小了16倍,最后一层卷积层输出大约为60*40大小,那么相当于用3*3的窗口滑窗(注意有padding),对于左边一支路而言,输出18个通道,每个通道map大小仍为60*40,代表每个滑窗中心对应感受野内存在目标与否的概率。右支路同理。
二、 anchor机制
anchor是rpn网络的核心。刚刚说到,需要确定每个滑窗中心对应感受野内存在目标与否。由于目标大小和长宽比例不一,需要多个尺度的窗。Anchor即给出一个基准窗大小,按照倍数和长宽比例得到不同大小的窗。例如论文中基准窗大小为16,给了(8、16、32)三种倍数和(0.5、1、2)三种比例,这样能够得到一共9种尺度的anchor,如图(摘自http://blog.csdn.net/shenxiaolu1984/article/details/51152614)。
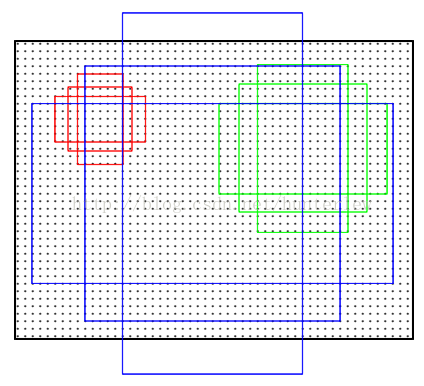
因此,在对60*40的map进行滑窗时,以中心像素为基点构造9种anchor映射到原来的1000*600图像中,映射比例为16倍。那么总共可以得到60*40*9大约2万个anchor。
三、 训练
RPN网络训练,那么就涉及ground truth和loss function的问题。对于左支路,ground truth为anchor是否为目标,用0/1表示。那么怎么判定一个anchor内是否有目标呢?论文中采用了这样的规则:1)假如某anchor与任一目标区域的IoU最大,则该anchor判定为有目标;2)假如某anchor与任一目标区域的IoU>0.7,则判定为有目标;3)假如某anchor与任一目标区域的IoU<0.3,则判定为背景。所谓IoU,就是预测box和真实box的覆盖率,其值等于两个box的交集除以两个box的并集。其它的anchor不参与训练。
于是,代价函数定义为:

代价函数分为两部分,对应着RPN两条支路,即目标与否的分类误差和bbox的回归误差,其中Leg(ti,ti*) = R(ti-ti*)采用在Fast-RCNN中提出的平滑L1函数,作者认为其比L2形式的误差更容易调节学习率。注意到回归误差中Leg与pi相乘,因此bbox回归只对包含目标的anchor计算误差。也就是说,如果anchor不包含目标,box输出位置无所谓。所以对于bbox的groundtruth,只考虑判定为有目标的anchor,并将其标注的坐标作为ground truth。此外,计算bbox误差时,不是比较四个角的坐标,而是tx,ty,tw,th,具体计算如下:

四、 联合训练
作者采用四步训练法:
1) 单独训练RPN网络,网络参数由预训练模型载入;
2) 单独训练Fast-RCNN网络,将第一步RPN的输出候选区域作为检测网络的输入。具体而言,RPN输出一个候选框,通过候选框截取原图像,并将截取后的图像通过几次conv-pool,然后再通过roi-pooling和fc再输出两条支路,一条是目标分类softmax,另一条是bbox回归。截止到现在,两个网络并没有共享参数,只是分开训练了;
3) 再次训练RPN,此时固定网络公共部分的参数,只更新RPN独有部分的参数;
4) 那RPN的结果再次微调Fast-RCNN网络,固定网络公共部分的参数,只更新Fast-RCNN独有部分的参数。
至此,网络训练结束,网络集检测-识别于一体,测试阶段流程图如下:

有一些实现细节,比如RPN网络得到的大约2万个anchor不是都直接给Fast-RCNN,因为有很多重叠的框。文章通过非极大值抑制的方法,设定IoU为0.7的阈值,即仅保留覆盖率不超过0.7的局部最大分数的box(粗筛)。最后留下大约2000个anchor,然后再取前N个box(比如300个)给Fast-RCNN。Fast-RCNN将输出300个判定类别及其box,对类别分数采用阈值为0.3的非极大值抑制(精筛),并仅取分数大于某个分数的目标结果(比如,只取分数60分以上的结果)。















 9651
9651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









