






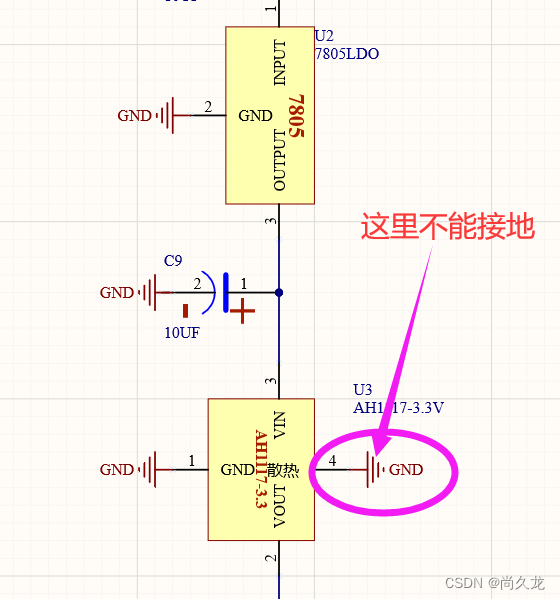
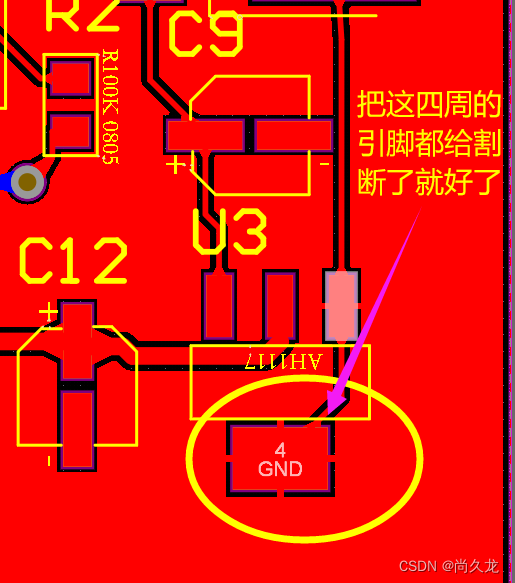
今天在新做好的电路板上测试电源时发现一个问题,那就是散热端不能接地,接地了就好像短路一样,芯片会热的厉害,当我把该引脚与地的所有连接都切断后,短路现象消失,特此记录一下,防止自己下次再犯同样的错误。
今天在新做好的电路板上测试电源时发现一个问题,那就是散热端不能接地,接地了就好像短路一样,芯片会热的厉害,当我把该引脚与地的所有连接都切断后,短路现象消失,特此记录一下,防止自己下次再犯同样的错误。
 2万+
464
621
2万+
464
621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























