







1. 从find_package(xxx REQUIRED)说起,如何引用其他package(包)
查看包的安装位置和include路径详细文件列表
例如,xxx包名为pluginlib
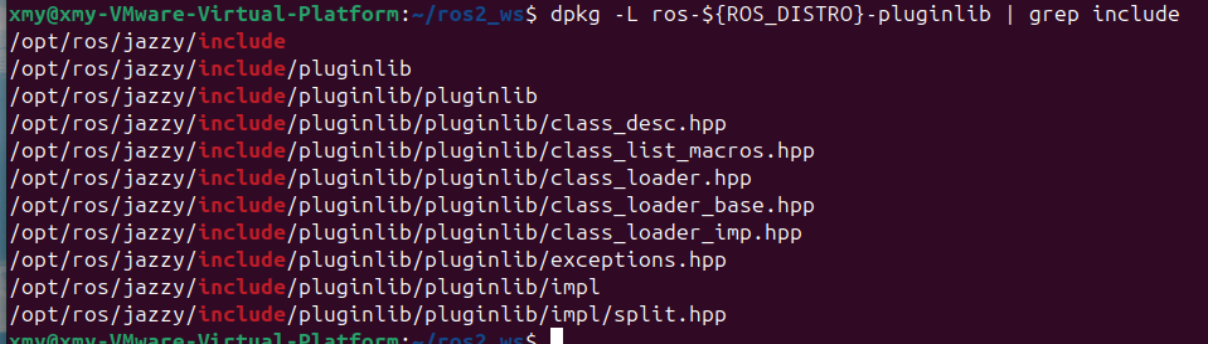
# 查看 pluginlib 的安装位置
dpkg -L ros-${ROS_DISTRO}-pluginlib | grep include这条指令的目的是查找ros-${ROS_DISTRO}-pluginlib包中包含include的路径,通常是为了找到与pluginlib相关的头文件路径。这对于开发ROS程序时,需要包含特定的头文件时非常有用。运行结果如下
1)确保package.xml中包含依赖
在package.xml中添加
<depend>pluginlib</depend> 2)更新 CMakeLists.txt
在 CMakeLists.txt 中确保有:
find_package(pluginlib REQUIRED)
ament_target_dependencies(area_node rclcpp pluginlib)3)完整编译流程
cd ~/ros2_ws
colcon build --packages-select polygon_base
source install/setup.bash

















 570
570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









