







 点云注册涉及粗注册、精细注册(如ICP)和全局注册,旨在通过重叠部分信息将不同位置点云变换到同一坐标系。粗注册利用标记点或无标记点策略;精细注册常采用ICP,尤其适用于已粗注册的点云;全局注册则用于减少累积误差。文章介绍了ICP的基本流程和特征点匹配的重要性。
点云注册涉及粗注册、精细注册(如ICP)和全局注册,旨在通过重叠部分信息将不同位置点云变换到同一坐标系。粗注册利用标记点或无标记点策略;精细注册常采用ICP,尤其适用于已粗注册的点云;全局注册则用于减少累积误差。文章介绍了ICP的基本流程和特征点匹配的重要性。
在论文中经常看到点云注册,他和我们经常说的点云拼接,点云配准其实是一个意思,都是把不同位置的点云通过重叠部分的信息,变换到同一个位置。下面我们就用注册这个名词来描述这个过程。
点云注册一般分为三类:粗注册,精细注册,全局注册。
粗注册:
一般用于注册两个位置相差很大的点云,比如两帧位于相机坐标系的点云。粗注册方法大致分为两类:有标记点粗注册和无标记点粗注册。标记点可以是用户手动标记的,也可以是物体扫描时贴的标记点。无标记点注册更加方便一些,但是对于一些比较对称或者重合部分很少的情况,可能会有一些失误的。另外还有一些根据设备的参数来计算粗注册变换的方法。
精细注册:
这里一般指ICP注册方法。主要用于已经粗注册好的点云,需要提升注册精度的情况。ICP可以加入标记点信息。因为众所周知,一些滑动情况会导致ICP注册失败,但是如果数据本身有标记点的话,可以加入标记点信息来提升注册的成功率。
全局注册:
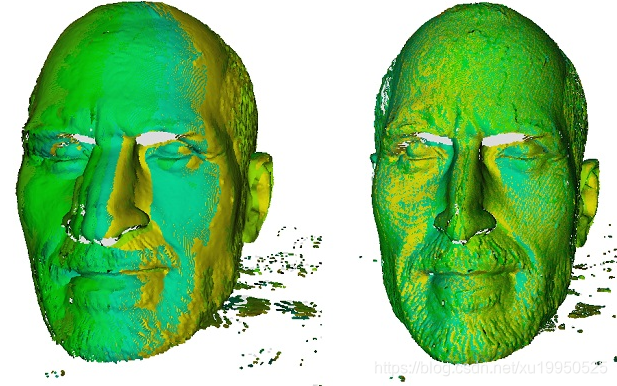
逐帧注册的点云数据,往往有累积误差。全局注册可以把累积误差分散到每一帧中去,从而减少整体的注册误差。另外,有些时候所有点云已经有了粗注册了,可以应用全局注册一次性把所有点云注册好。如下图所示。全局注册属于点云的精细注册,点云需要初始对齐好。它和ICP注册的区别在于,它是多个点云同时注册,点云个数一般大于2。
参考文献:http://geometryhu
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包








