







论文题目:DLL: Direct LIDAR Localization. A map-based localization approach for aerial robots
代码连接:https://github.com/robotics-upo/dll
期刊:arXiv
来源:巴勃罗·德·奥拉维德大学机器人实验室
摘要:
本文提出了一种直接基于地图的三维激光雷达定位技术DLL,并将其应用于航空机器人。DLL实现了基于点与地图的非线性优化距离的点云地图配准,因此不需要特性,也不需要点对应。该方法在给定初始姿态的情况下,通过对测程法预测的姿态进行改进,可以跟踪机器人的姿态。通过使用真实数据集和模拟的基准测试,我们展示了该方法如何比MonteCarlo定位方法表现得更好,并实现了与其他基于优化的方法相当的精度,但运行速度更快一个数量级。该方法在里程表误差下也具有鲁棒性。该方法已经在机器人操作系统(ROS)下实现,并且是公开的。
引言中的细节:
使用特征点进行激光雷达帧在点云地图中的定位的不可行之处在于:3D地图上的点密度要比激光雷达传感器读数高得多。这迫使在激光雷达和地图中使用不同的方法进行特征检测。同时,基于特征的方法在没有特殊区域的场景中可能会遇到困难。
使用ICP方法进行激光雷达帧在点云地图中的定位缺点在于:它们需要大量的计算来处理3D大点云。最近点搜索是ICP方法的主要计算瓶颈。
使用NDT方法进行激光雷达帧在点云地图中的定位,以概率的方式表征点云形状,可以使用格网编号代替最近邻搜索,从而不幸的是,数值解计算使得在考虑大点云的情况下,逼近算法难以实时计算(相对而言)。
所提方法的优势在于:DLL不需要计算最近邻,从而省去大量的时间,通过使用非线性优化最小化点到地图的距离来估计将输入点云和地图对齐的转换。虽然这种优化需要计算,但DLL利用本地化设置(在这种设置中,您需要一个环境的先验映射)来预先计算一个Distance Field (DF)映射,从而促进优化过程。
相关工作中的细节:
最新的3D LiDAR在点云地图中的定位方法可见:M. Elhousni and X. Huang, “A survey on 3d lidar localization for autonomous vehicles,” in 2020 IEEE Intelligent Vehicles Symposium (IV). IEEE, pp. 1879–1884.
在[18]中提出了一种基于三维蒙特卡罗定位并使用原始点云作为观测的姿态跟踪方法。三维距离场(DF)用于表示地图。采用粒子滤波器跟踪无人机的姿态。每个扫描的似然函数是从DF导出的,不需要点对应。在[19]中考虑了类似的方法,其中一个有效的3D DF表示被提出来计算那些可能性。此外,该方法还考虑了潜在的未映射测量,以提高定位。
本文提出了一种新的基于非线性优化而不是滤波的直接方法。在2D[20]中,这显示了相对于基于滤波器的本地化方法的优势。该方法利用三维距离场和有效的优化公式,对地图上的测程预测位置进行修正。
核心思想:
根据ICP配准代价函数:
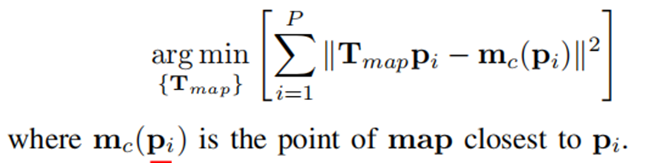
DLL遵循NDT的关键思想,将配准过程建模为非线性优化过程,但将点云建模为一个距离场。不是单独的点,DLL构建被调用映射的距离字段表示DF (x)。同理得到基于距离场的点云配准的代价函数:
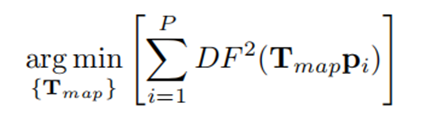
DF(X)描述的是LiDAR的X点距离地图的最近距离。
这是一种有趣的表征方式,不需要进行最近邻搜索和计算,便可直接得到最近距离,需要付出的代价是:距离函数从3D地图计算,并存储为一个固定分辨率的3D网格,网格的大小由三维点的空间分布决定,每个网格单元包含到该单元的3D映射的最近点的距离,三维网格是通过系统计算到所有单元中最近的地图点的距离来构建的,可以使用KD-tree加速计算,这个过程的计算代价很高,但它是在机器人定位之前离线执行的。
当计算LiDAR点位到某个网格的距离时,使用三线性插值参数快速计算,公式如下:

其他的细节请参考其他优秀的博客:
https://new.qq.com/rain/a/20211128A011BY00
https://blog.csdn.net/qq_46480130/article/details/121602926















 894
894











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









