







- 新建SSC文件,参考EtherCAT Slave Desi Quick Guide 和 《ETG2000_S_R_V1i0i6_EtherCATSlaveInformationSpecification.pdf》
- SSC配置参考博主博文SSC从站
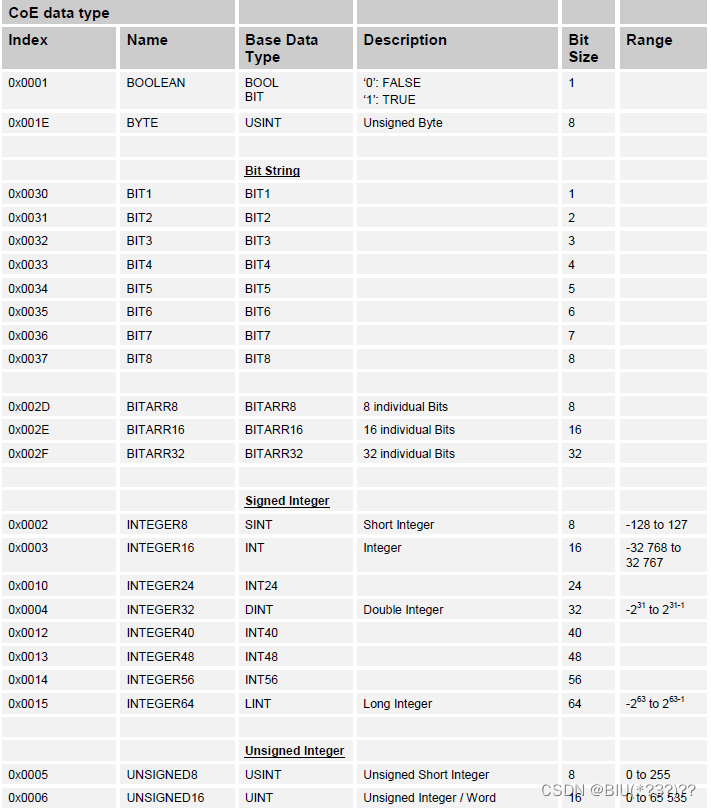
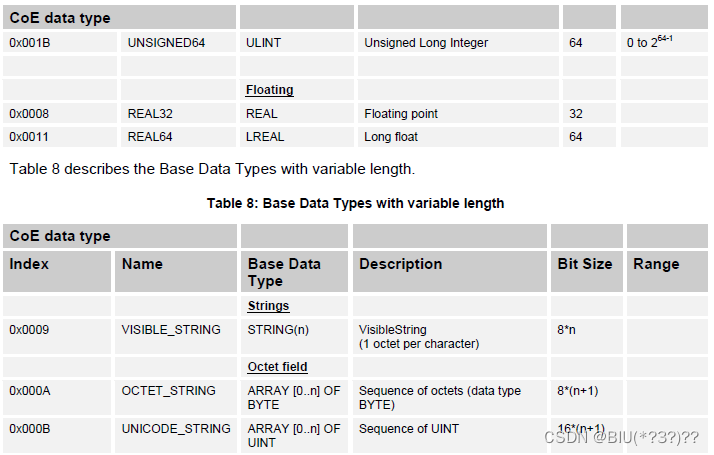
- EtherCAT基本数据类型

SSC生成代码
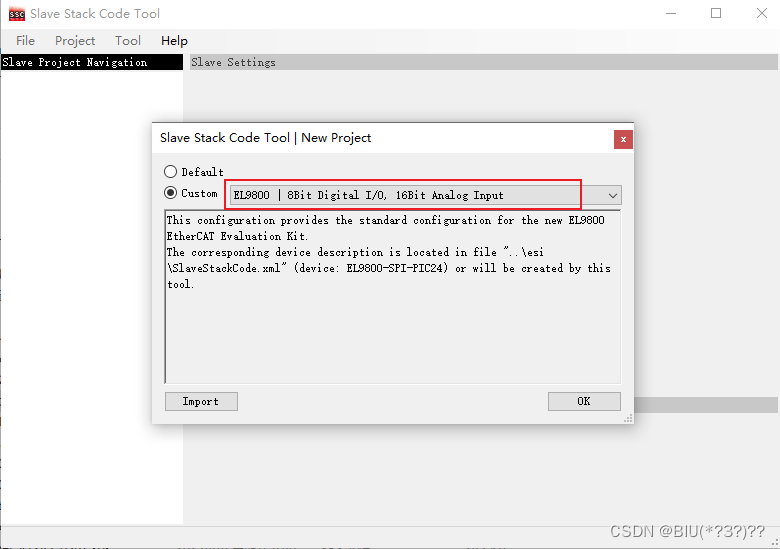
- 新建SSC文件(建议使用SSC 5.12版本,相对5.11版本需要修改内容更少一点)
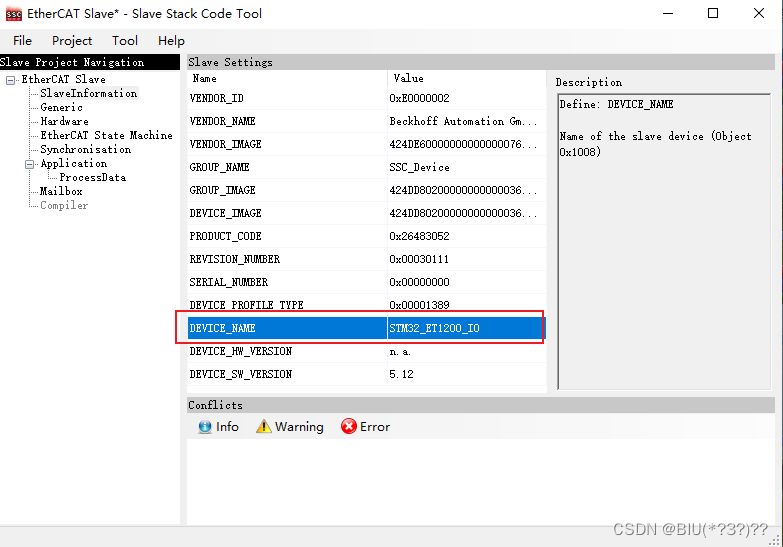
- SlaveInformation 修改
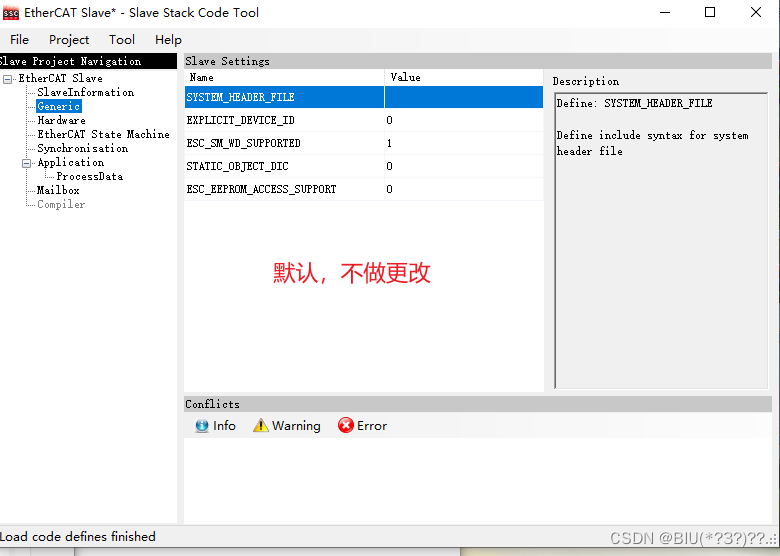
- Generic保持不变
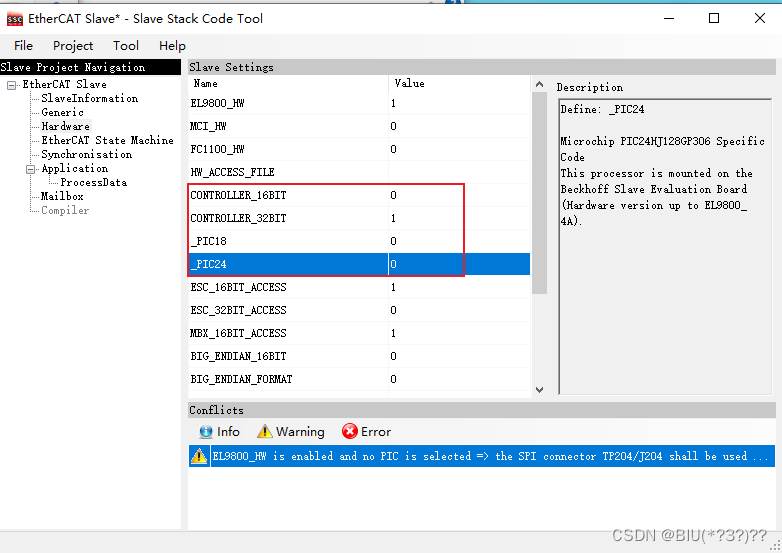
- HardWare修改,适配STM32
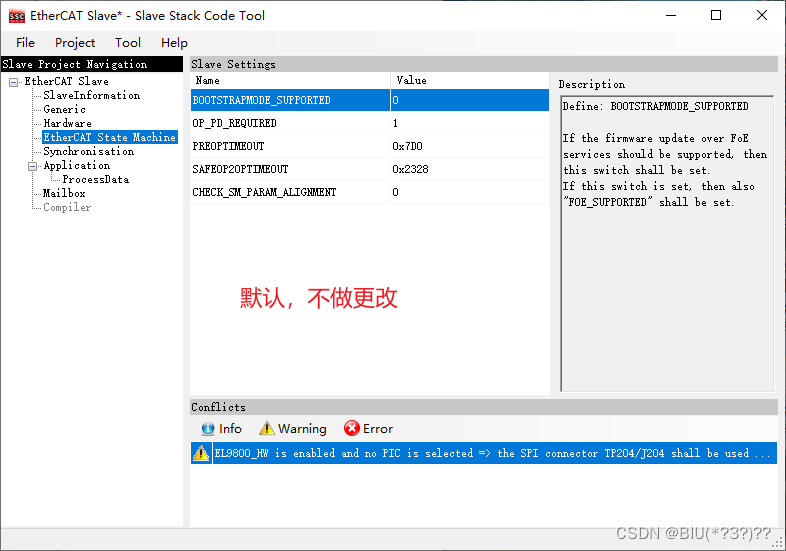
- EtherCAT State Machine 保持不变
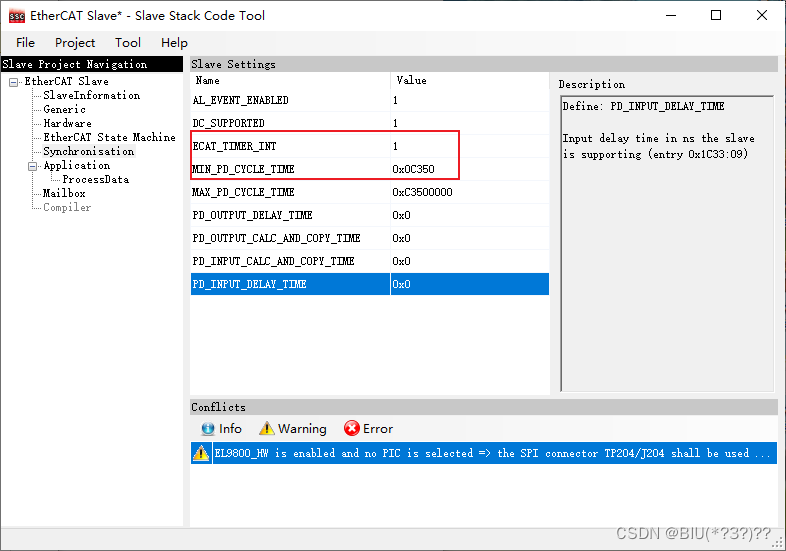
- Synchronisation 修改:增加1ms定时器,用于EtherCAT看门狗
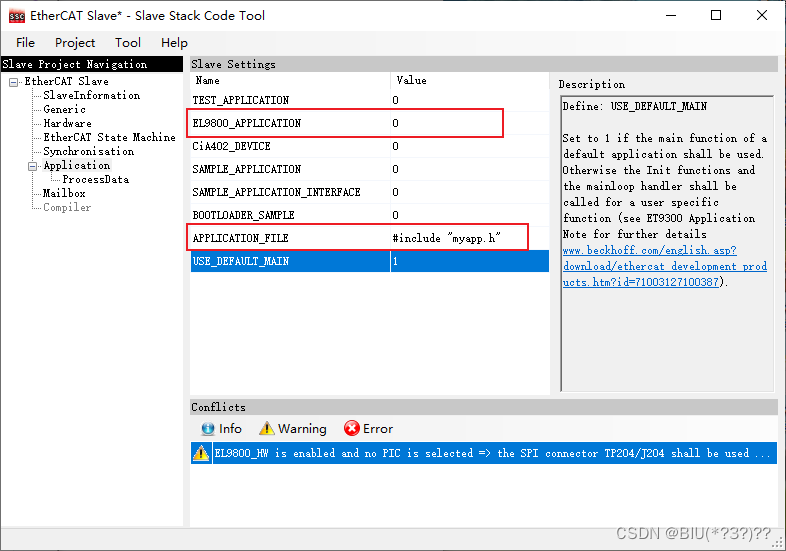
- Application 修改:不使用el9800app,c,增加头文件包含。(保存后再打开该项会变少)
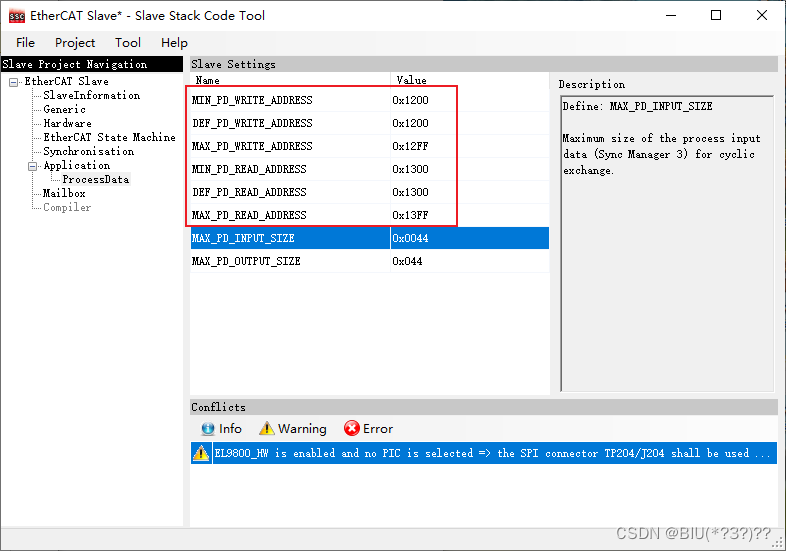
- ProcessData 修改:修改PDO数据传输地址
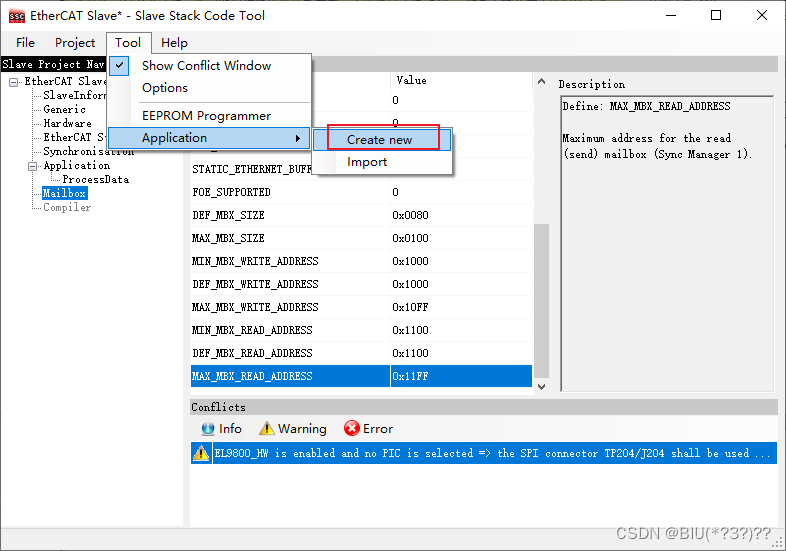
- MailBox 修改:修改SM传输地址
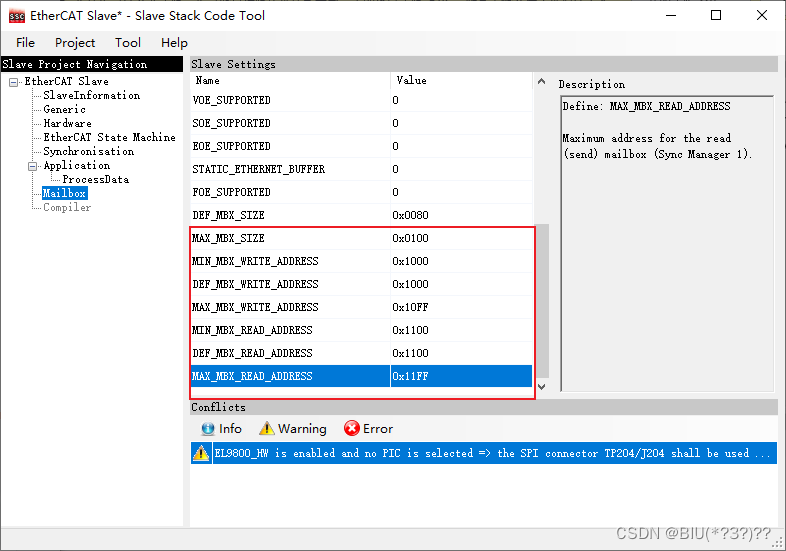
ET1200只有1K内存,范围0x1000~0x1400;0x1000~0x11FF 分配给邮箱,0x1200~0x13FF分配给PDO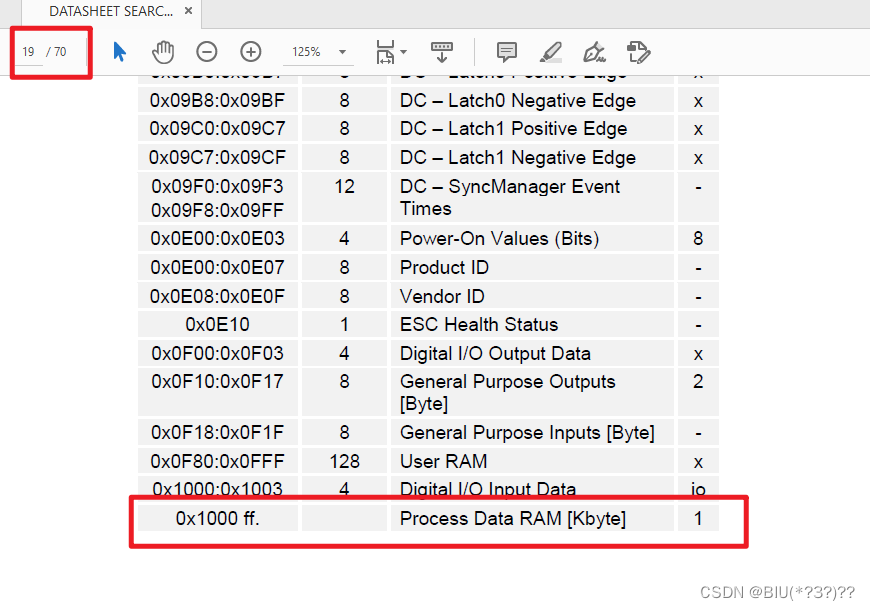
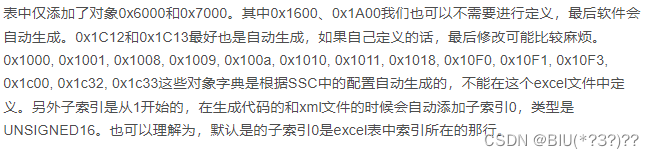
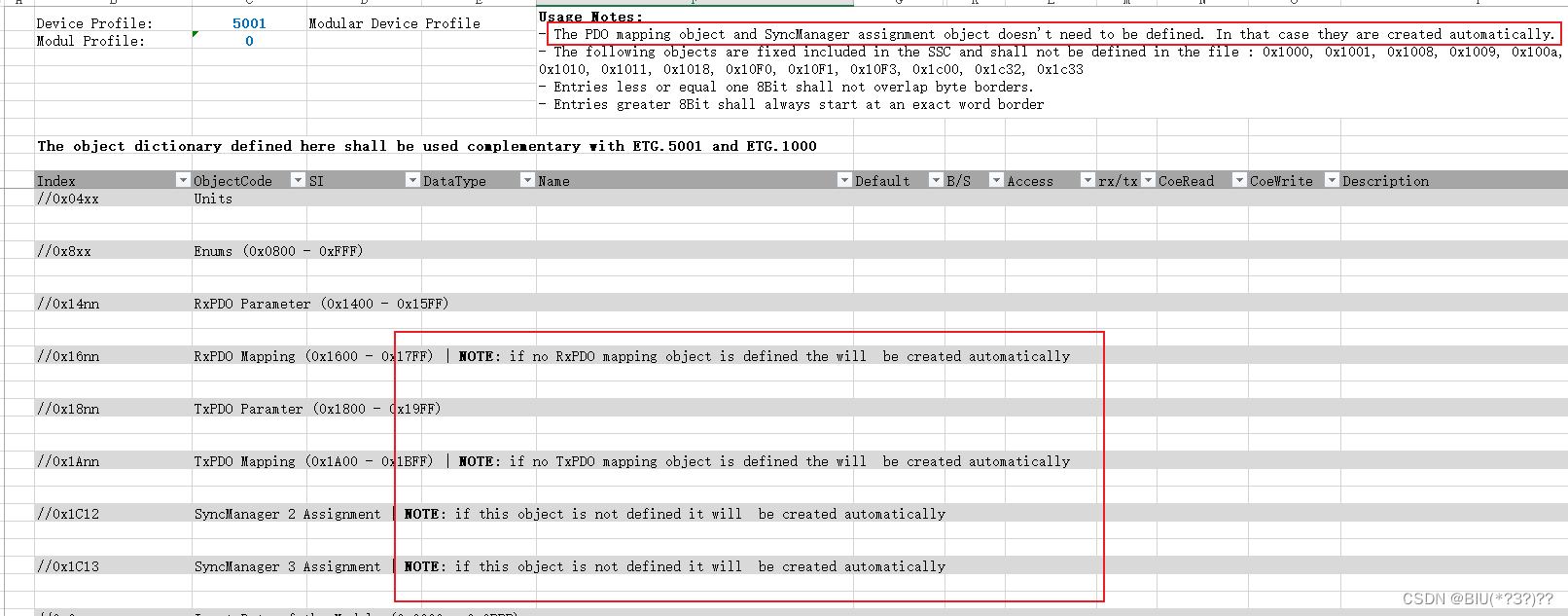
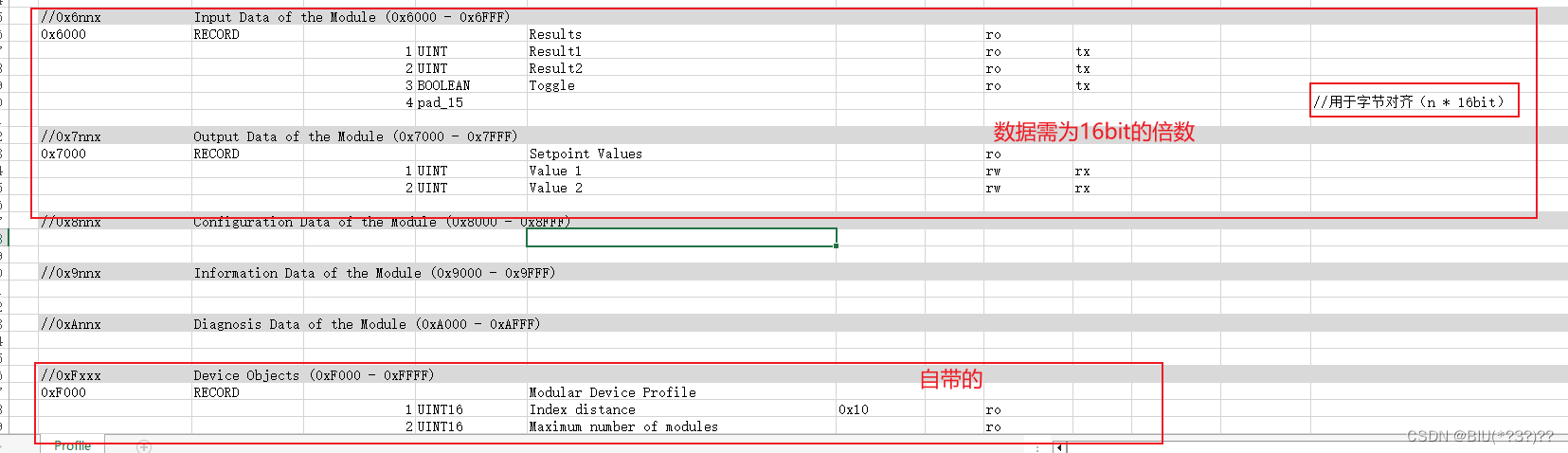
- 添加PDO变量
- 在打开的Excel表格中添加要传输的PDO变量
- 映射部分地址会自动生成,无需添加,只需要添加0x6000和0x7000的PDO就行
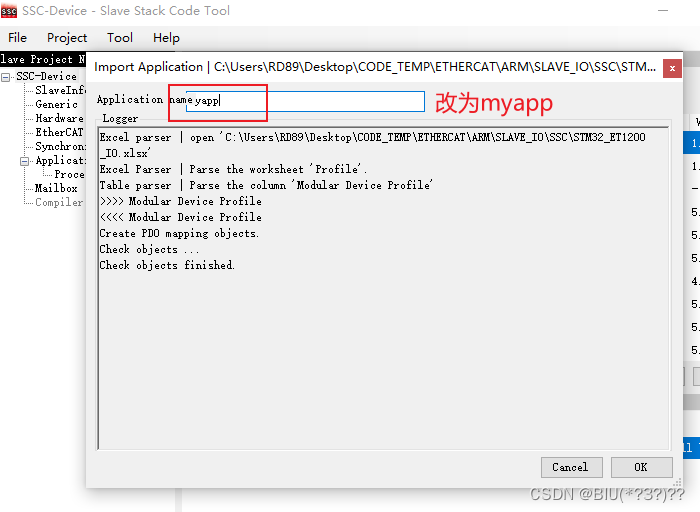
- 保存并改名为myapp
- 生成EtherCAT代码
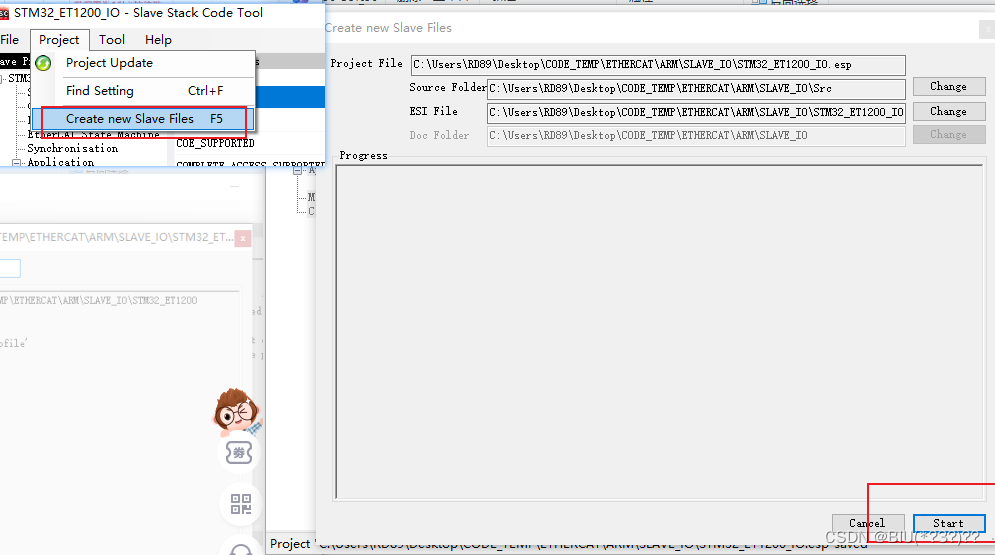
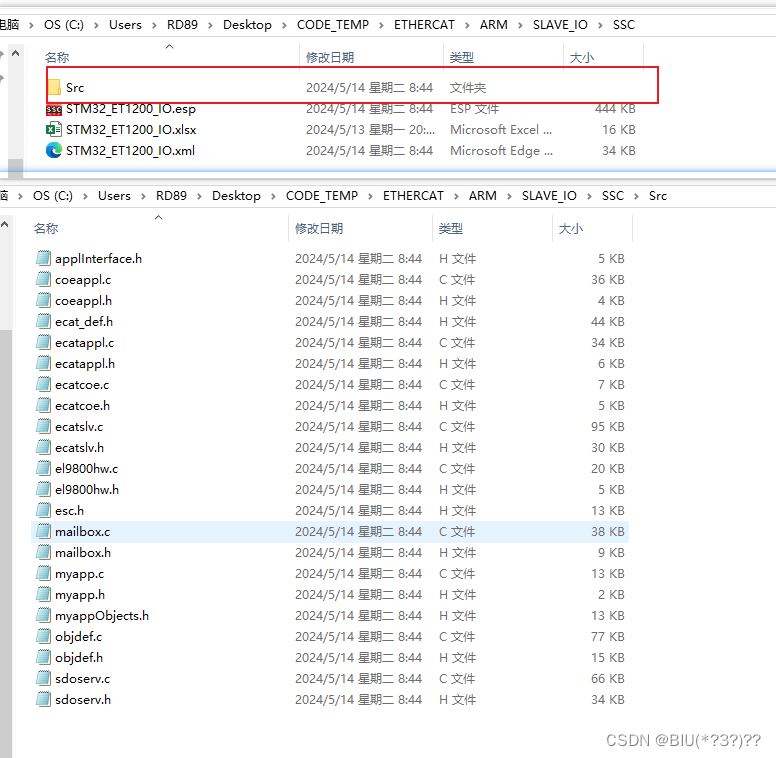
- 生成代码及位置如下所示
从站操作,修改STM32相应程序
将生成的代码文件导入项目中,项目列表如下图。主函数在myapp.c的最底部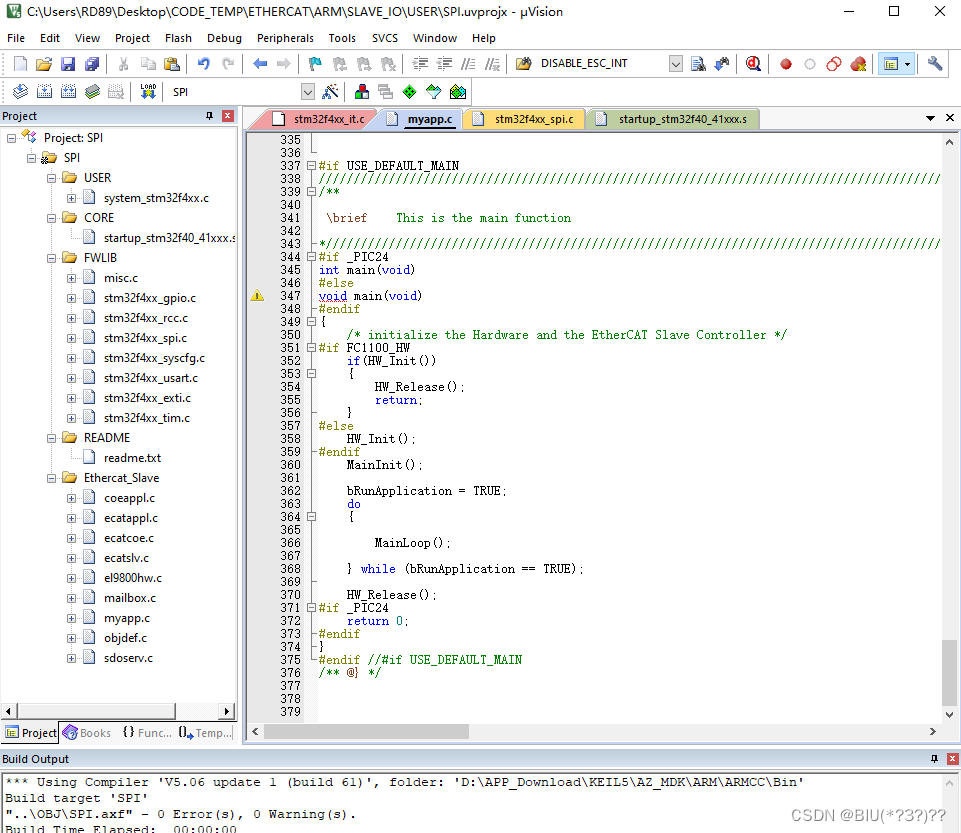 修改el9800hw.c文件:
修改el9800hw.c文件:
- 根据报错去添加define(由于没有用到SYNC1,所以SYNC1的定义不做任何处理)
- 添加spi、timer和exit初始化函数
- 修改RxTxSpiData函数,改成SPI先发送后接收函数
- 增加定时器中断处理函数
/*
* This source file is part of the EtherCAT Slave Stack Code licensed by Beckhoff Automation GmbH & Co KG, 33415 Verl, Germany.
* The corresponding license agreement applies. This hint shall not be removed.
*/
/**
\addtogroup EL9800_HW EL9800 Platform (Serial ESC Access)
@{
*/
/**
\file el9800hw.c
\author EthercatSSC@beckhoff.com
\brief Implementation
Hardware access implementation for EL9800 onboard PIC18/PIC24 connected via SPI to ESC
\version 5.12
<br>Changes to version V5.11:<br>
V5.12 EL9800 1: improve the SPI access<br>
<br>Changes to version V5.10:<br>
V5.11 ECAT10: change PROTO handling to prevent compiler errors<br>
V5.11 EL9800 2: change PDI access test to 32Bit ESC access and reset AL Event mask after test even if AL Event is not enabled<br>
<br>Changes to version V5.01:<br>
V5.10 ESC5: Add missing swapping<br>
V5.10 HW3: Sync1 Isr added<br>
V5.10 HW4: Add volatile directive for direct ESC DWORD/WORD/BYTE access<br>
Add missing swapping in mcihw.c<br>
Add "volatile" directive vor dummy variables in enable and disable SyncManger functions<br>
Add missing swapping in EL9800hw files<br>
<br>Changes to version V5.0:<br>
V5.01 HW1: Invalid ESC access function was used<br>
<br>Changes to version V4.40:<br>
V5.0 ESC4: Save SM disable/Enable. Operation may be pending due to frame handling.<br>
<br>Changes to version V4.30:<br>
V4.40 : File renamed from spihw.c to el9800hw.c<br>
<br>Changes to version V4.20:<br>
V4.30 ESM: if mailbox Syncmanger is disabled and bMbxRunning is true the SyncManger settings need to be revalidate<br>
V4.30 EL9800: EL9800_x hardware initialization is moved to el9800.c<br>
V4.30 SYNC: change synchronisation control function. Add usage of 0x1C32:12 [SM missed counter].<br>
Calculate bus cycle time (0x1C32:02 ; 0x1C33:02) CalcSMCycleTime()<br>
V4.30 PDO: rename PDO specific functions (COE_xxMapping -> PDO_xxMapping and COE_Application -> ECAT_Application)<br>
V4.30 ESC: change requested address in GetInterruptRegister() to prevent acknowledge events.<br>
(e.g. reading an SM config register acknowledge SM change event)<br>
GENERIC: renamed several variables to identify used SPI if multiple interfaces are available<br>
V4.20 MBX 1: Add Mailbox queue support<br>
V4.20 SPI 1: include SPI RxBuffer dummy read<br>
V4.20 DC 1: Add Sync0 Handling<br>
V4.20 PIC24: Add EL9800_4 (PIC24) required source code<br>
V4.08 ECAT 3: The AlStatusCode is changed as parameter of the function AL_ControlInd<br>
<br>Changes to version V4.02:<br>
V4.03 SPI 1: In ISR_GetInterruptRegister the NOP-command should be used.<br>
<br>Changes to version V4.01:<br>
V4.02 SPI 1: In HW_OutputMapping the variable u16OldTimer shall not be set,<br>
otherwise the watchdog might exceed too early.<br>
<br>Changes to version V4.00:<br>
V4.01 SPI 1: DI and DO were changed (DI is now an input for the uC, DO is now an output for the uC)<br>
V4.01 SPI 2: The SPI has to operate with Late-Sample = FALSE on the Eva-Board<br>
<br>Changes to version V3.20:<br>
V4.00 ECAT 1: The handling of the Sync Manager Parameter was included according to<br>
the EtherCAT Guidelines and Protocol Enhancements Specification<br>
V4.00 APPL 1: The watchdog checking should be done by a microcontroller<br>
timer because the watchdog trigger of the ESC will be reset too<br>
if only a part of the sync manager data is written<br>
V4.00 APPL 4: The EEPROM access through the ESC is added
*/
/*--------------------------------------------------------------------------------------
------
------ Includes
------
--------------------------------------------------------------------------------------*/
#include "ecat_def.h"
#include "ecatslv.h"
#define _EL9800HW_ 1
#include "el9800hw.h"
#undef _EL9800HW_
/*remove definition of _EL9800HW_ (#ifdef is used in el9800hw.h)*/
#include "ecatappl.h"
/*--------------------------------------------------------------------------------------
------
------ internal Types and Defines
------
--------------------------------------------------------------------------------------*/
typedef union
{
unsigned short Word;
unsigned char Byte[2];
} UBYTETOWORD;
typedef union
{
UINT8 Byte[2];
UINT16 Word;
}
UALEVENT;
#define EtherCAT_SPIx SPI1
#define SELECT_SPI GPIO_ResetBits(GPIOE, GPIO_Pin_1);
#define DESELECT_SPI GPIO_SetBits(GPIOE, GPIO_Pin_1);
#define ETHERCAT_SPI_INIT SPI1_Init()
#define EscIsr EXTI0_IRQHandler
#define Sync0Isr EXTI15_10_IRQHandler
#define Sync1Isr EXTI9_5_IRQHandler
#define TimerIsr TIM2_IRQHandler
#define ACK_TIMER_INT TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
#define INIT_ESC_INT Esc_Init();
#define INIT_SYNC0_INT SYNC0_Init();
#define INIT_SYNC1_INT
#define ENABLE_SYNC0_INT
#define ENABLE_SYNC1_INT
#define INIT_ECAT_TIMER TIM2_Init(1000-1,168-1)
#define START_ECAT_TIMER TIM_Cmd(TIM2, ENABLE)
#define ENABLE_GLOBAL_INT __enable_irq()
#define DISABLE_GLOBAL_INT __disable_irq()
#define ACK_ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1998
1998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









