






Depth Map Prediction
Depth Map Prediction from a Single Image using a Multi-Scale Deep Network
利用多尺度深度网络预测单个图片的深度图。所谓多尺度,其实是一个粗粒度和一个细粒度。这两个尺度分别对应了神经网络结构的两个部分,如下图。首先由粗粒度网络预测除整体的景深,然后通过细粒度网络对局部进行精细。
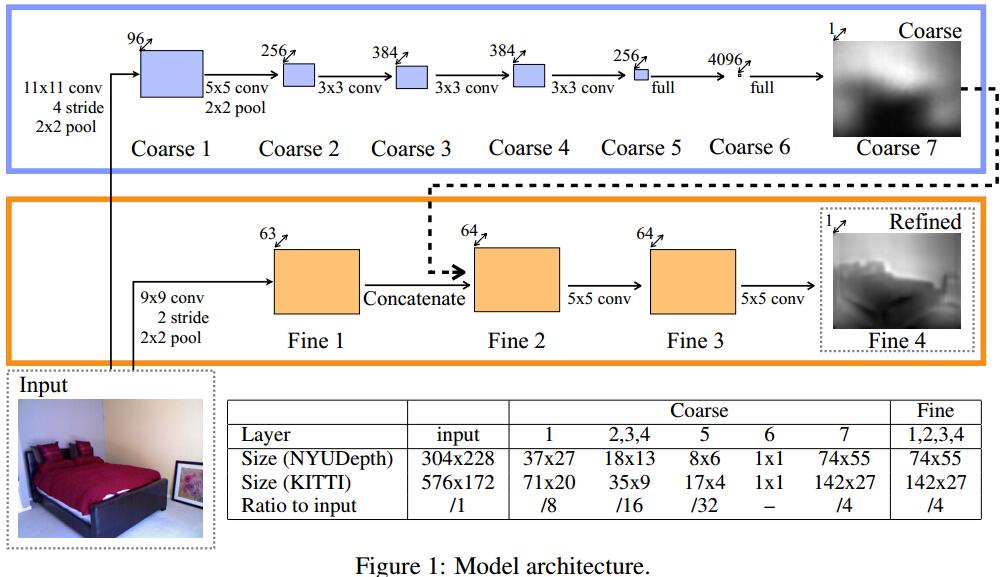
Coarse网络中除了最后一层是线性输出以外,其它层都使用了ReLu激活单元。在Coarse 6引入了droupout,防止过拟合。Fine为全卷积层。
定义了scale-invariant mean squared error 如下。
预测深度图
y
,以及ground truth->
可以看出 α 表示平均误差。在回过来看 D(y,y∗) ,其第一项为每个像素的误差,第二项为平均误差,同时满足了单个像素误差和平均像素误差,那为什么不给第二项加个因子 β∈[0,1] ?所有是 y 像素倍数的像素都有相同错误,因此认为这类像素都具有尺度不变性(原文:All scalar multiples of y have the same error, hence the scale invariance.)。
设
Training loss
Data Augmentation
- Scale
- Rotation
- Translation
- Color
- Flips
Predicting Depth, Surface Normals and Semantic Labels
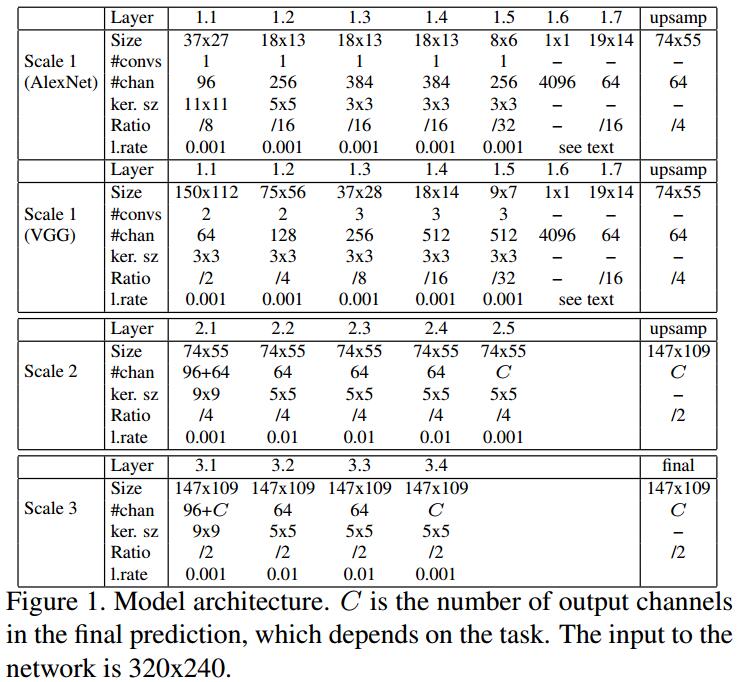
这篇文章是Depth Map Prediction from a Single Image using a Multi-Scale Deep Network 的升级版,首先增加了更多的卷积层(模型加深),其次增加了第三个尺度提高的分辨率(输出的szie为输入的0.5)。最后多通道的特征图代替了scale 1和2的输出。基于这个框架(下图),实现了用一个基础框架分别预测了深度图,曲面法线图和语义标注。
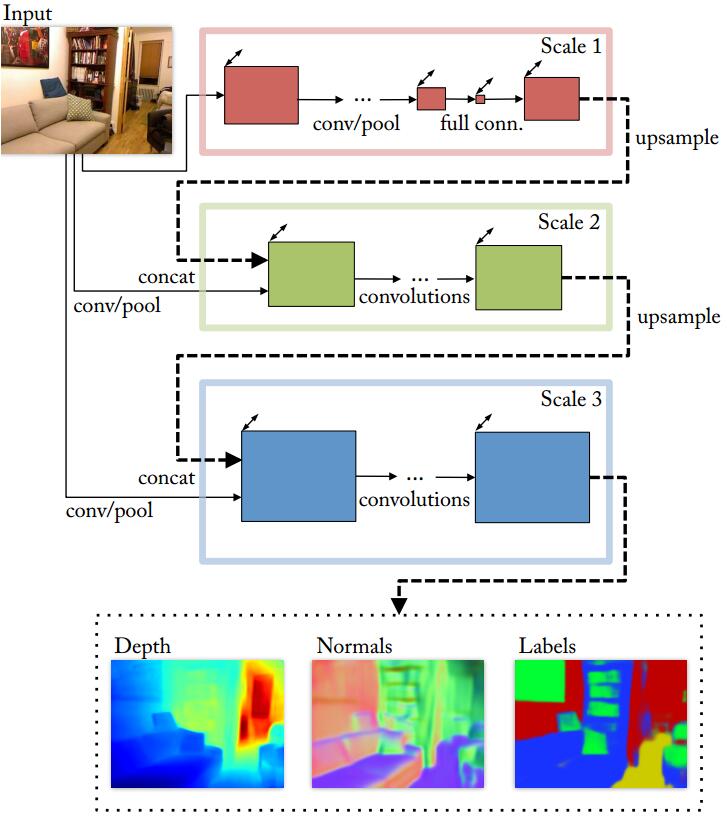
模型的训练(using SGD)分为两个部分。首先训练scales 1 和 2,然后上采用scale 2的输出,训练scale 3。
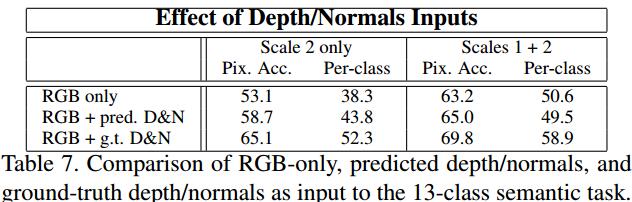
Coarse network(Scale 1)对提高像素准确率扮演者重要的角色。















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









