






UR机器人官方提供两个方式来运行URSim,第一种是直接用虚拟机打开他们提供的Offline URSim 虚拟环境,大概长下图这个样,其中上方红色的NON LINUX就是UR基于Ubuntu14开发的示教器系统,如果只想使用仿真而不需要额外功能的开发,那么下载好,拿虚拟机直接打开这个就行,进去之后桌面有对应系列机器人的URSim软件,直接打开就行。
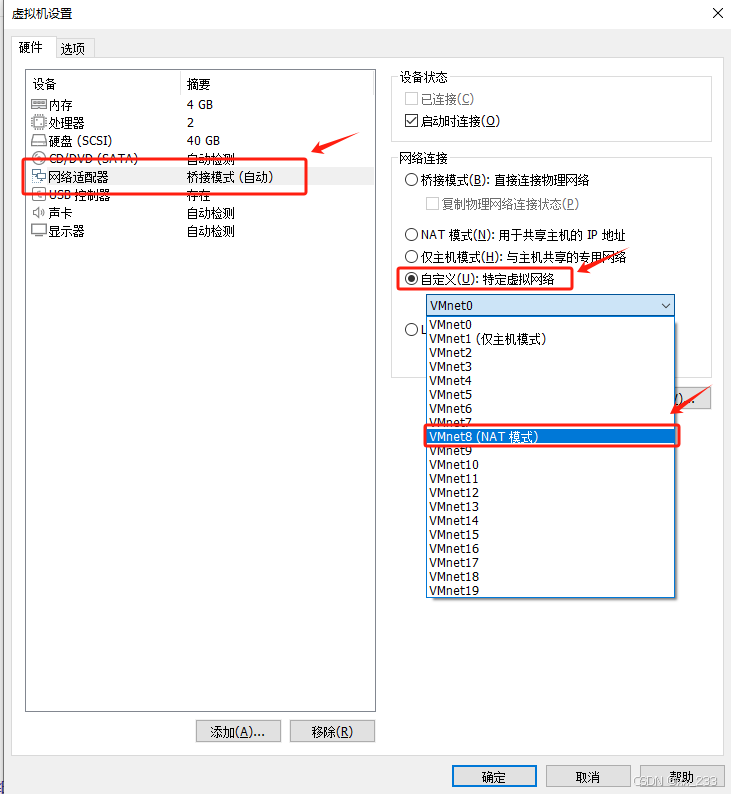
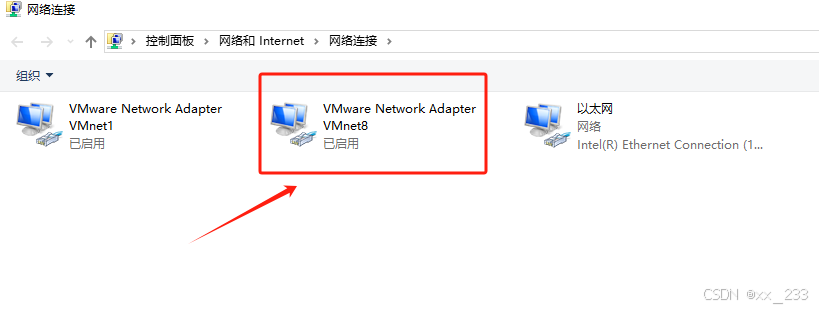
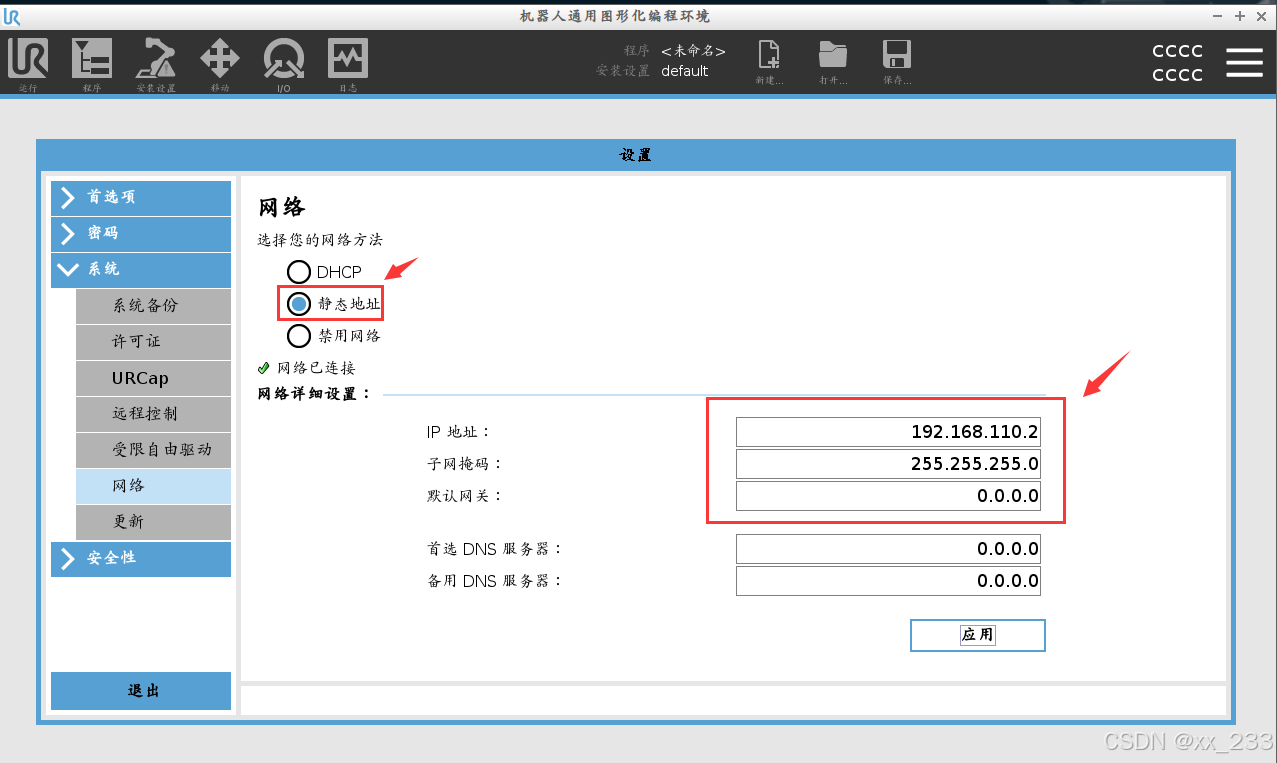
 如果需要与自己电脑上的软件或代码进行通讯,首先需要把防火墙全都关掉,在虚拟机这儿设置,按照下图的方式,假设你电脑的IP地址为192.168.1.1,那么在网络那儿找到类似VMware net8名称的虚拟网卡,将它的地址同样设置成192.168.1.1,然后在URSim中的网络设置中,将机器人的IP地址设置成同网段的地址,比如192.168.1.2,观察上面的网络连接是否正常。当然可以ping一下看看,这里我使用的是110的网段,这样机器人就能跟你这台电脑上的软件通讯了。
如果需要与自己电脑上的软件或代码进行通讯,首先需要把防火墙全都关掉,在虚拟机这儿设置,按照下图的方式,假设你电脑的IP地址为192.168.1.1,那么在网络那儿找到类似VMware net8名称的虚拟网卡,将它的地址同样设置成192.168.1.1,然后在URSim中的网络设置中,将机器人的IP地址设置成同网段的地址,比如192.168.1.2,观察上面的网络连接是否正常。当然可以ping一下看看,这里我使用的是110的网段,这样机器人就能跟你这台电脑上的软件通讯了。
 此刻最无语的事儿发生了,就是我在调试并查阅UR script手册的过程中发现,默认情况下UR机器人无法作为服务端来进行TCP/IP通讯,当然这里我在官网发帖,也咨询了UR官方人员的。鉴于我目前的项目是一定需要机器人作为服务端的,因此只能使用URCaps SDK对PolyScope进行二次开发的,更无语的是,可能是我太菜了,我怎么搞都不能在上面那个NON Linux虚拟环境中进行文件挂载与传输的,因此SDK包死活都整不进去,只能尝试着再去建一个Linux的虚拟机环境并在这个环境中安装一开始的图中黄色框的软件部分。这一整,安装过程中报了一大堆error,难受。下面给大伙整理一下细节。
此刻最无语的事儿发生了,就是我在调试并查阅UR script手册的过程中发现,默认情况下UR机器人无法作为服务端来进行TCP/IP通讯,当然这里我在官网发帖,也咨询了UR官方人员的。鉴于我目前的项目是一定需要机器人作为服务端的,因此只能使用URCaps SDK对PolyScope进行二次开发的,更无语的是,可能是我太菜了,我怎么搞都不能在上面那个NON Linux虚拟环境中进行文件挂载与传输的,因此SDK包死活都整不进去,只能尝试着再去建一个Linux的虚拟机环境并在这个环境中安装一开始的图中黄色框的软件部分。这一整,安装过程中报了一大堆error,难受。下面给大伙整理一下细节。
首先仔细观察官网安装的版本的过程,比如我这次安装的是最新的版本,官网上是这么写的:
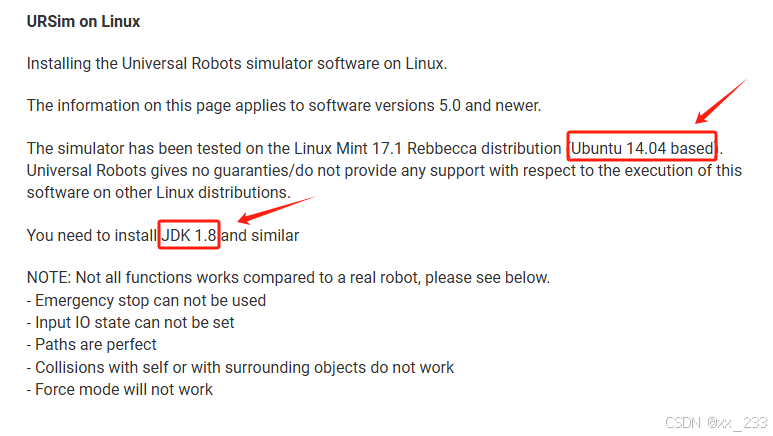
意思是软件是在Ubuntu系统14.04上进行测试的,不保证在其它版本的系统中运行的一毛一样,其实感觉要求不是很严格,我自己用的18.04。但是你必须得使用JDK 1.8来部署环境。我第一次安装的时候没注意,报错 error :缺少j3d-core部件,安装了新版本的Java还是一样,后面注意到这个就跑去安装了JDK1.8,安装的话其实CSDN上有很多教程,我随便贴一个,大抵过程就是,去官网下载JDK8,要注意下载的架构是否跟你安装的虚拟机一样,一般Linux都是amd64的吧,这个注意一下,然后在用户文件夹新建文件夹,把下载的JDK传输并命令行解压,用sudo gedit /etc/profile 命令按教程修改一下环境配置,保存再使用source /etc/profile来更新一下。最后使用java -version来看一下版本对不对。教程就看这个吧:Java环境配置(linux安装jdk8、手动安装、命令行安装)_java-1.8.0-openjdk-devel-CSDN博客
这样URSim就能正常安装了,把URSim解压在随便哪个文件夹,最好别用中文嗷。然后cd进入到有install.sh的路径,然后在这打开终端。
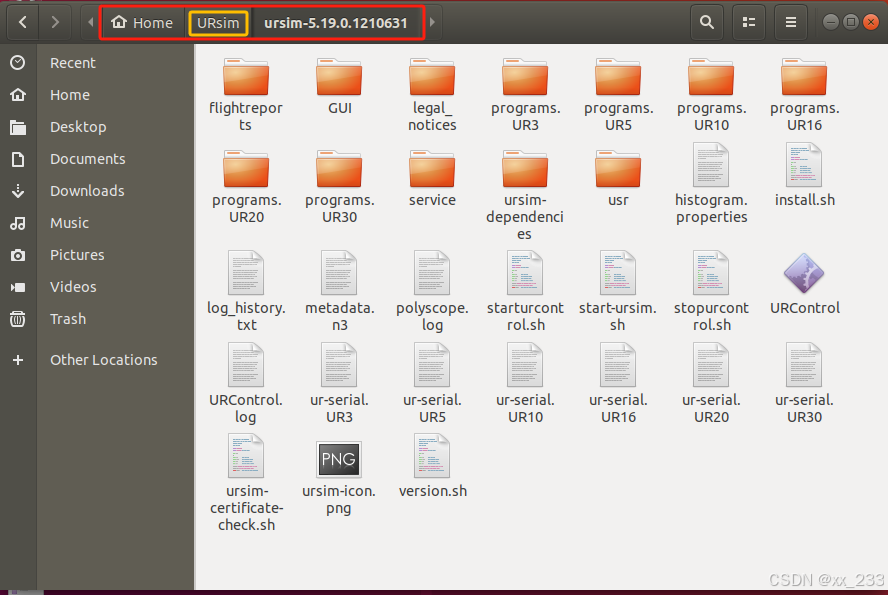
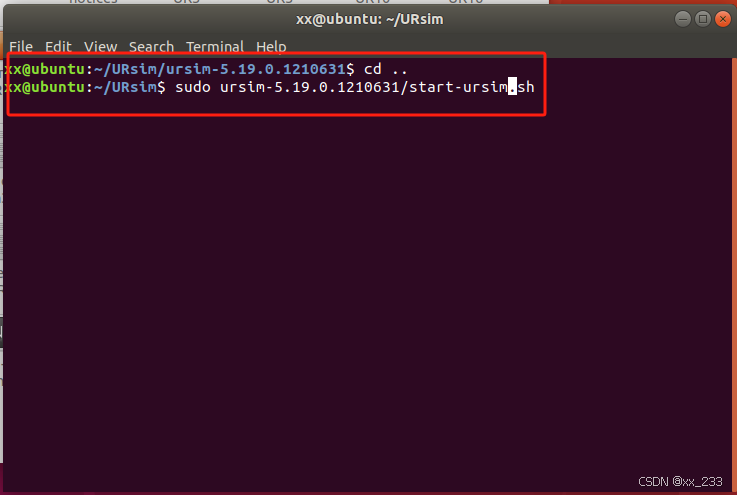
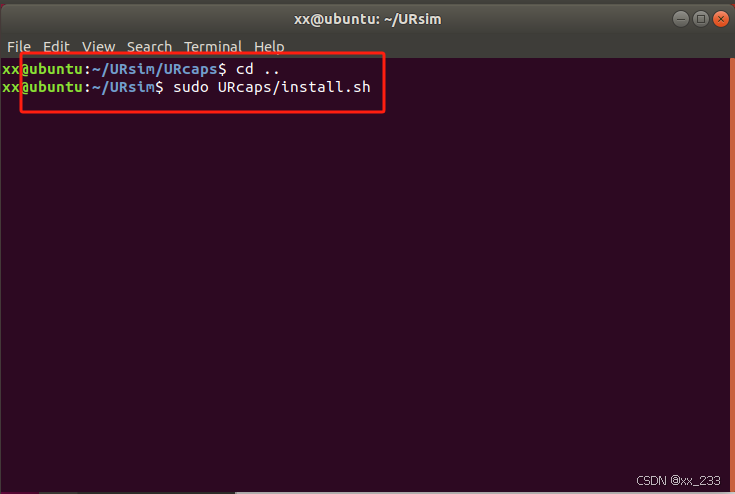
可能是保证运行路径,官方设置的是必须在install.sh外面的路径来运行命令。比如我建立的是URsim文件夹,然后把URsim软件解压在这个ursim-5.19....的文件夹里,因此我需要按照下面这样回到上一层目录。然后使用管理权限去这样运行。如果上面一切顺利,那么这里应该能安装完成。打开的话,同样在这个路径下运行start-ursim.sh。这里不能使用sudo,不然会报错。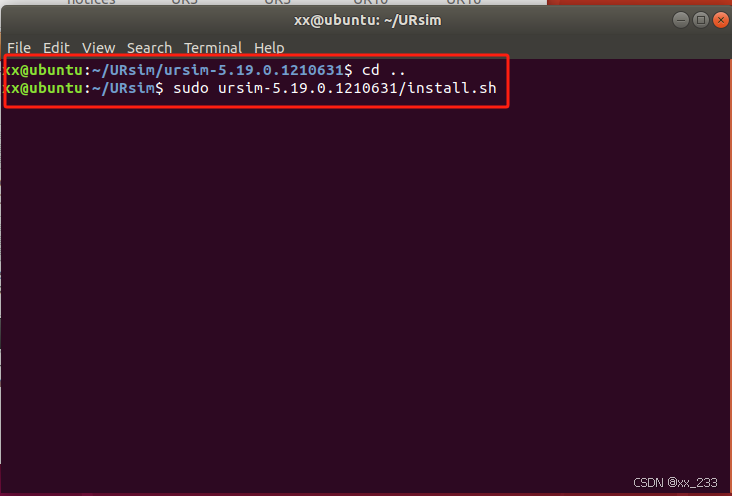
安装好之后,需要部署URcap SDK了,同样的我们观察一下官网的说明:
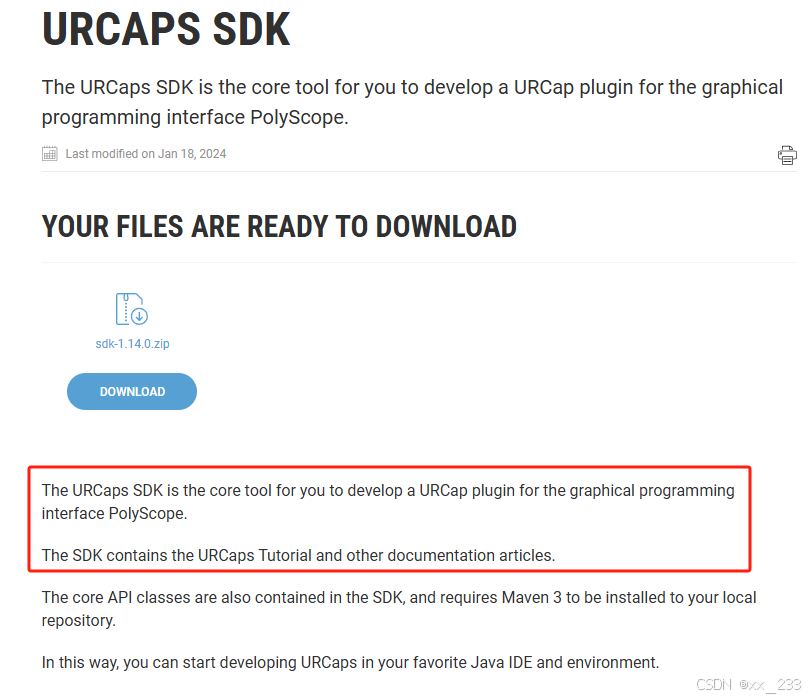
大抵意思是说,URCaps是用来开发URCap插件来提供PolyScope的可视化接口。核心的接口与教程在这个SDK包里。重点是下面有一句,这个SDK必须使用Maven 3来进行部署。没用过Java,整这个花了好久,先把SDK下载好了,同样在Linux随便的文件夹中解压。然后安装Maven 3,我安装的是3.3.9,同样的这里跟JDK安装步骤几乎一样,最后也要在环境中进行更新。这里也贴一个教程:Linux环境安装Maven(详细图文)_linux安装maven-CSDN博客
Maven安装完了,我们就差两步就能运行URCap插件了。打开SDK中的教程,是这个文件:
在第9页里,第四章中描述了如何安装SDK、编译URCap文件。
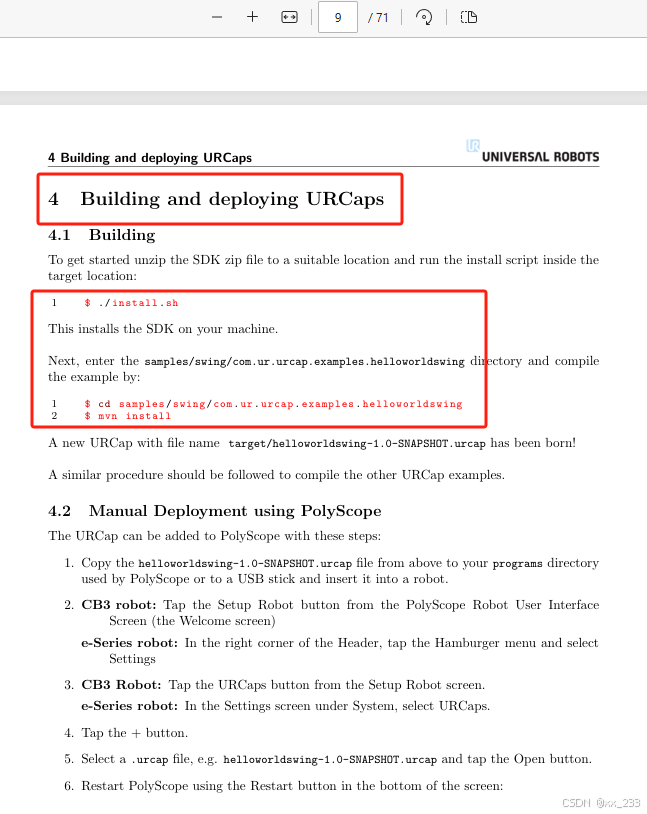
第一步安装SDK,需要我们在URCaps解压完的文件夹中,同样找到install.sh文件,然后在上一层目录进行安装,别忘了sudo。安装需要把UR官网的插件自动进行下载,然后才能编译,因此这里需要联网,可能速度很慢,如果报超时就多试几次。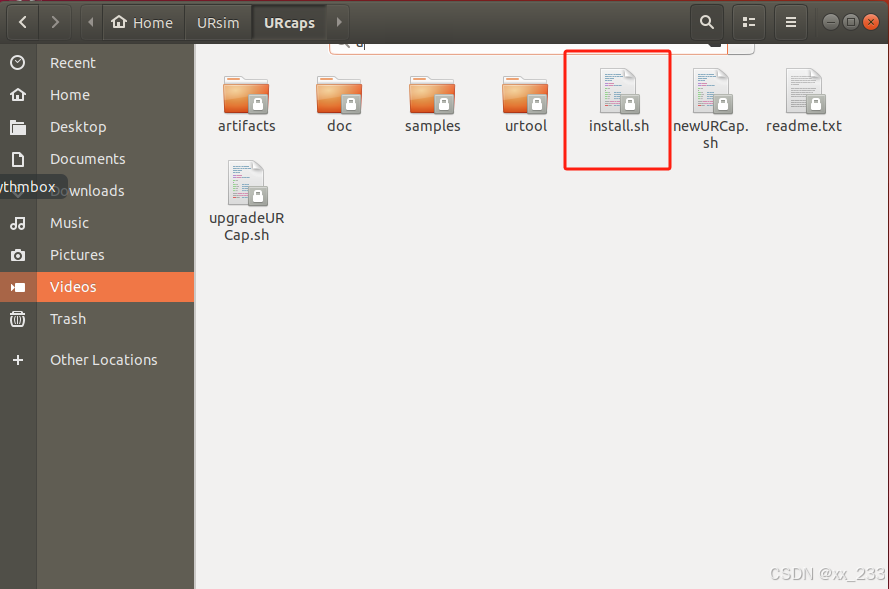
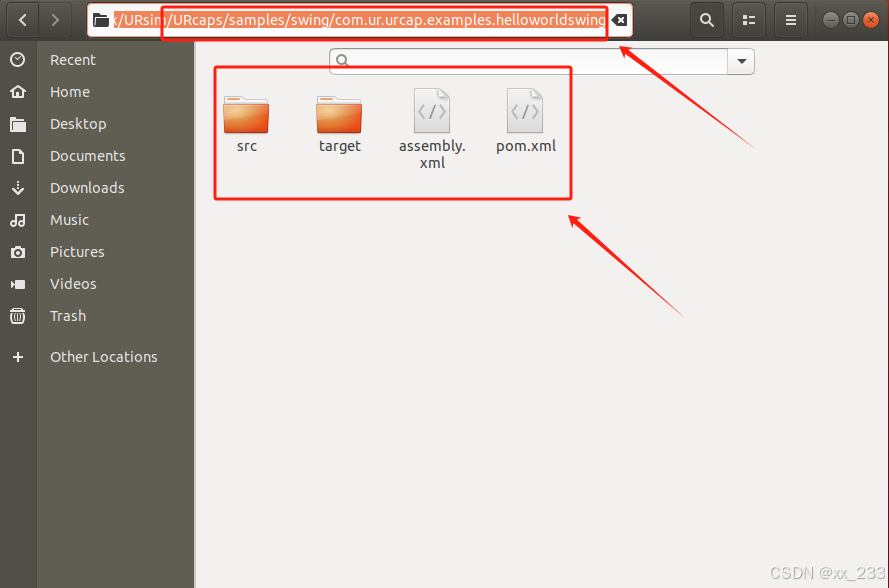
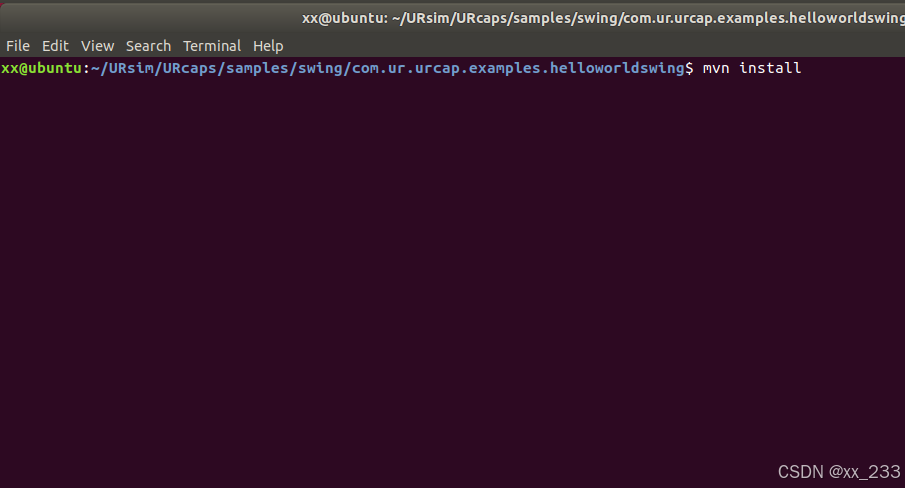
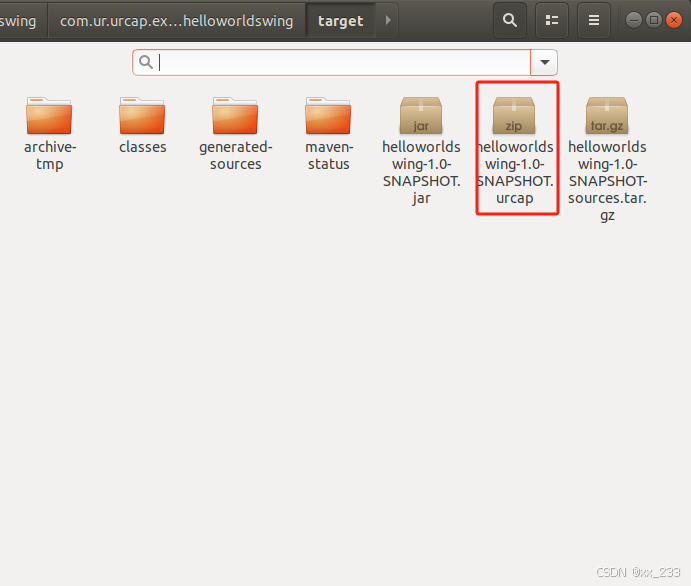
第二步就是进行URCap文件的编译,这里需要先找到你想运行的插件,比如最新手的helloworld文件,找到sample文件夹,然后进入到以下路径,在这里打开终端,运行mvn install。注意这里不需要进入到上一层目录,然后等待编译成功,最后会在target文件夹中出现编译完成的后缀为urcap的文件。
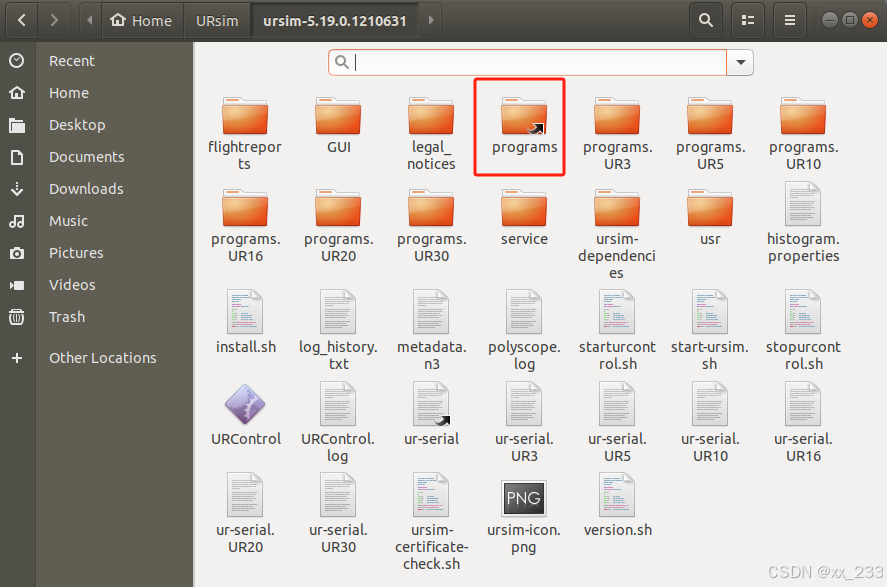
使用插件的话比较简单,找到之前URSim解压的根文件夹,第一层有个“programs”的文件夹,刚生成的后缀urcap文件放到这里,这里programs文件夹只有在URsim运行的时候才会显示。放进去之后,URsim软件里会进行显示。
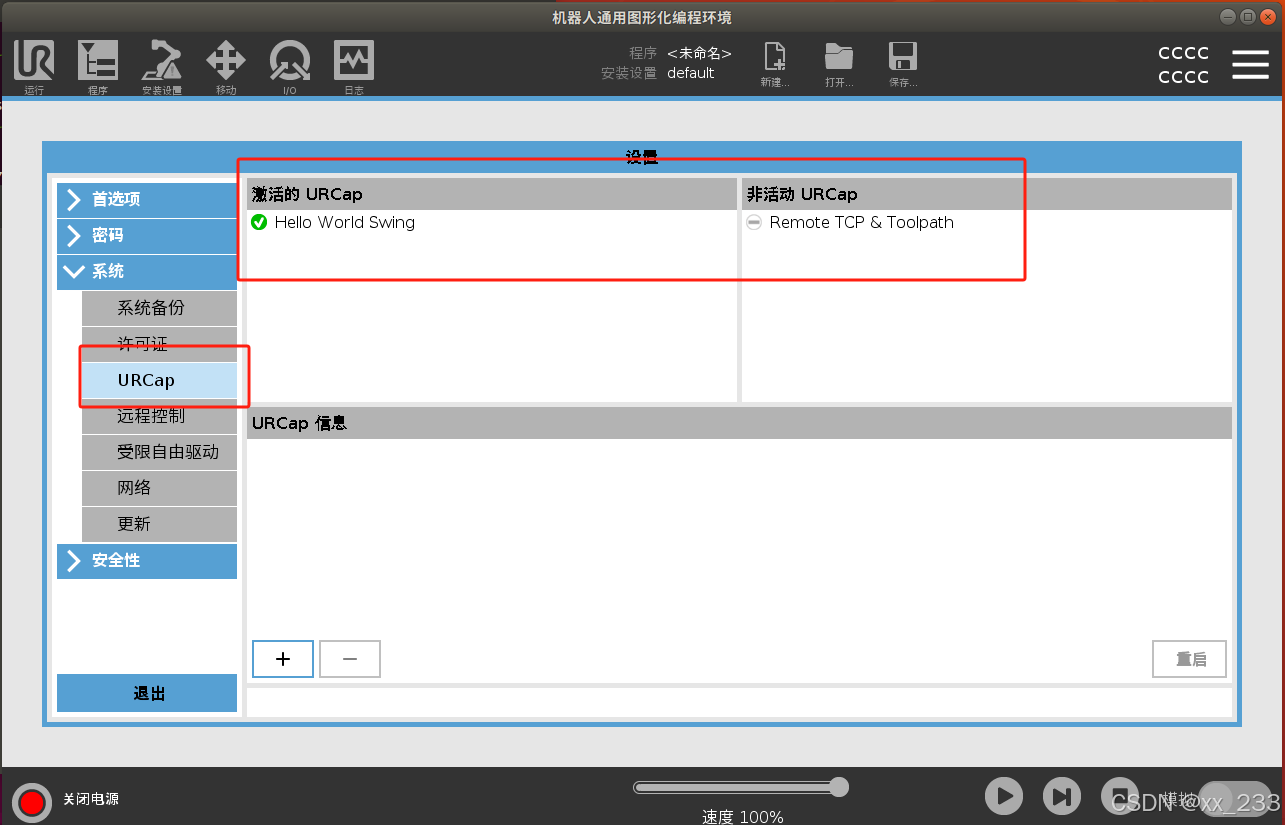
点击右上角的设置,然后在系统下拉中找到URCap,将其导入进去之后,进行重启。
重启后编程界面会多一个URCap,可以放在编辑步骤里,并运行。如下:

在右边加入你的名字,并使能机器人后,点击右下角的播放按键就可以运行程序了。

但是!但是!我对Java跟Swing框架一点不知道,也不知道这个开发要不要延期,等我把这个插件开发完了,再给大家分享代码啥的,毕竟这学习成本还是有一点的。当然更希望UR官方在新版本里能整个服务端的接口,这样我就不用自己开发了。如果大伙儿想偷懒,我就把自己的虚拟环境放这儿,可以自己下载使用。
虚拟环境链接:通过百度网盘分享的文件:URsim整体虚拟环境.zip
链接:https://pan.baidu.com/s/1SYLQq50b7_-7LIZ67sa5KQ?pwd=w2lj
提取码:w2lj
虚拟机密码是:1
JDK安装位置跟Maven安装位置可以用命令查看 sudo gedit /etc/profile。
URSIM跟URCaps安装位置则在home文件夹下的URsim中。

















 21万+
21万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









