









1.源代码获取
源代码的获取教程在我的另一篇博客中有提到,这里就不多赘述了,给个传送门
2.数据集获取
这里我提供了一个安全帽检测项目的数据集,大家可以自行下载,当然网上也有很多开源的数据集供大家下载尝试,这里给个安全帽数据集的传送门。
获取数据集后,将其解压到yolov5项目下的主目录中。
3.voc数据集转换为txt格式
由于voc数据集中的标签格式都是xml文件,不是项目所能读取的数据,因此我们需要先将其全部转成yolo能读懂的标签格式(txt格式)。
这里我们可以在我们项目的主目录下创建一个py文件,这里我命名为convert.py文件:
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
def convert(size, box):
x_center = (box[0] + box[1]) / 2.0
y_center = (box[2] + box[3]) / 2.0
x = x_center / size[0]
y = y_center / size[1]
w = (box[1] - box[0]) / size[0]
h = (box[3] - box[2]) / size[1]
return (x, y, w, h)
def convert_annotation(xml_files_path, save_txt_files_path, classes):
xml_files = os.listdir(xml_files_path)
print(xml_files)
for xml_name in xml_files:
print(xml_name)
xml_file = os.path.join(xml_files_path, xml_name)
out_txt_path = os.path.join(save_txt_files_path, xml_name.split('.')[0] + '.txt')
out_txt_f = open(out_txt_path, 'w')
tree = ET.parse(xml_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
# b=(xmin, xmax, ymin, ymax)
print(w, h, b)
bb = convert((w, h), b)
out_txt_f.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
if __name__ == "__main__":
# 需要转换的类别,需要一一对应
classes1 = ['hat', 'person']
# 2、voc格式的xml标签文件路径
xml_files1 = r'D:\detection\yolov5-5.0\yolov5-5.0\VOC2028\VOC2028\Annotations'
# 3、转化为yolo格式的txt标签文件存储路径
save_txt_files1 = r'D:\detection\yolov5-5.0\yolov5-5.0\dataset\annotations'
convert_annotation(xml_files1, save_txt_files1, classes1)
这里main函数中的路径需要根据实际情况进行修改,看你数据的存放的位置,输入绝对路径即可。这里我将voc的所有标签数据放到了主路径下的一个dataset文件中的annotation文件夹中,方便后面进一步划分训练集和验证集和测试集。这里我将所有的图片数据集也转移到了dataset下面的image文件夹中:
4.制作训练集、验证集等
这里用到一个实现数据抽取功能的函数,我将其命名为divide.py文件:
import os, random, shutil
def moveimg(fileDir, tarDir):
pathDir = os.listdir(fileDir) # 取图片的原始路径
filenumber = len(pathDir)
rate = 0.72 # 自定义抽取图片的比例,比方说100张抽10张,那就是0.1
picknumber = int(filenumber * rate) # 按照rate比例从文件夹中取一定数量图片
sample = random.sample(pathDir, picknumber) # 随机选取picknumber数量的样本图片
print(sample)
for name in sample:
shutil.move(fileDir + name, tarDir + "\\" + name)
return
def movelabel(file_list, file_label_train, file_label_val):
for i in file_list:
if i.endswith('.jpg'):
# filename = file_label_train + "\\" + i[:-4] + '.xml' # 可以改成xml文件将’.txt‘改成'.xml'就可以了
filename = file_label_train + "\\" + i[:-4] + '.txt' # 可以改成xml文件将’.txt‘改成'.xml'就可以了
if os.path.exists(filename):
shutil.move(filename, file_label_val)
print(i + "处理成功!")
if __name__ == '__main__':
fileDir = r"D:\detection\yolov5-5.0\yolov5-5.0\dataset\images" + "\\" # 源图片文件夹路径
tarDir = r'D:\detection\yolov5-5.0\yolov5-5.0\VOCdevkit\images\train' # 图片移动到新的文件夹路径
moveimg(fileDir, tarDir)
file_list = os.listdir(tarDir)
file_label_train = r"D:\detection\yolov5-5.0\yolov5-5.0\dataset\annotations" # 源图片标签路径
file_label_val = r"D:\detection\yolov5-5.0\yolov5-5.0\VOCdevkit\labels\train" # 移动标签的路径
# 移动到新的文件路径
movelabel(file_list, file_label_train, file_label_val)
main函数中的路径根据自己的需要设置。这里为了减少路径的更改配置,我都按照统一标准,在主路径下创建了一个VOCdevkit的文件夹:

在代码中,moveimg方法中,rate是从源数据集中随机获得数据的比例,可以自行设置来制作不同数量的数据集。
5.开始训练
这一部分,炮哥带你学的博客中写的十分清楚到位,跟着大佬的来做就可以了。
6.我遇到的bug以及解决方式
除了第五部分中,炮哥所讲解的训练前的一些设置,我自己本身还遇到了一些额外的问题,这里我将一一展示,并提供解决方法。
首先第一个bug就是:
AttributeError: Can't get attribute 'SPPF' on <module 'models.common' from 'D:\\detection\\yolov5-5.0\\yolov5-5.0\\models\\common.py'>
解决方式:在models/common.py中增加一个类:
import warnings
class SPPF(nn.Module):
# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
y1 = self.m(x)
y2 = self.m(y1)
return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
第二个bug就是:
RuntimeError: result type Float can't be cast to the desired output type __int64
解决方式:
第一步,先打开utils中的loss.py文件,使用cltr+f快捷键搜索:
for i in range(self.nl):
会在177行找到对应代码,将其改成:
for i in range(self.nl):
anchors, shape = self.anchors[i],p[i].shape
gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
第二步,还是打开utils中的loss.py文件,使用cltr+f快捷键搜索:
indices.append
在第211行找到需要修改的代码,将其改为:
indices.append((b, a, gj.clamp_(0, shape[2] - 1), gi.clamp_(0, shape[3] - 1)))
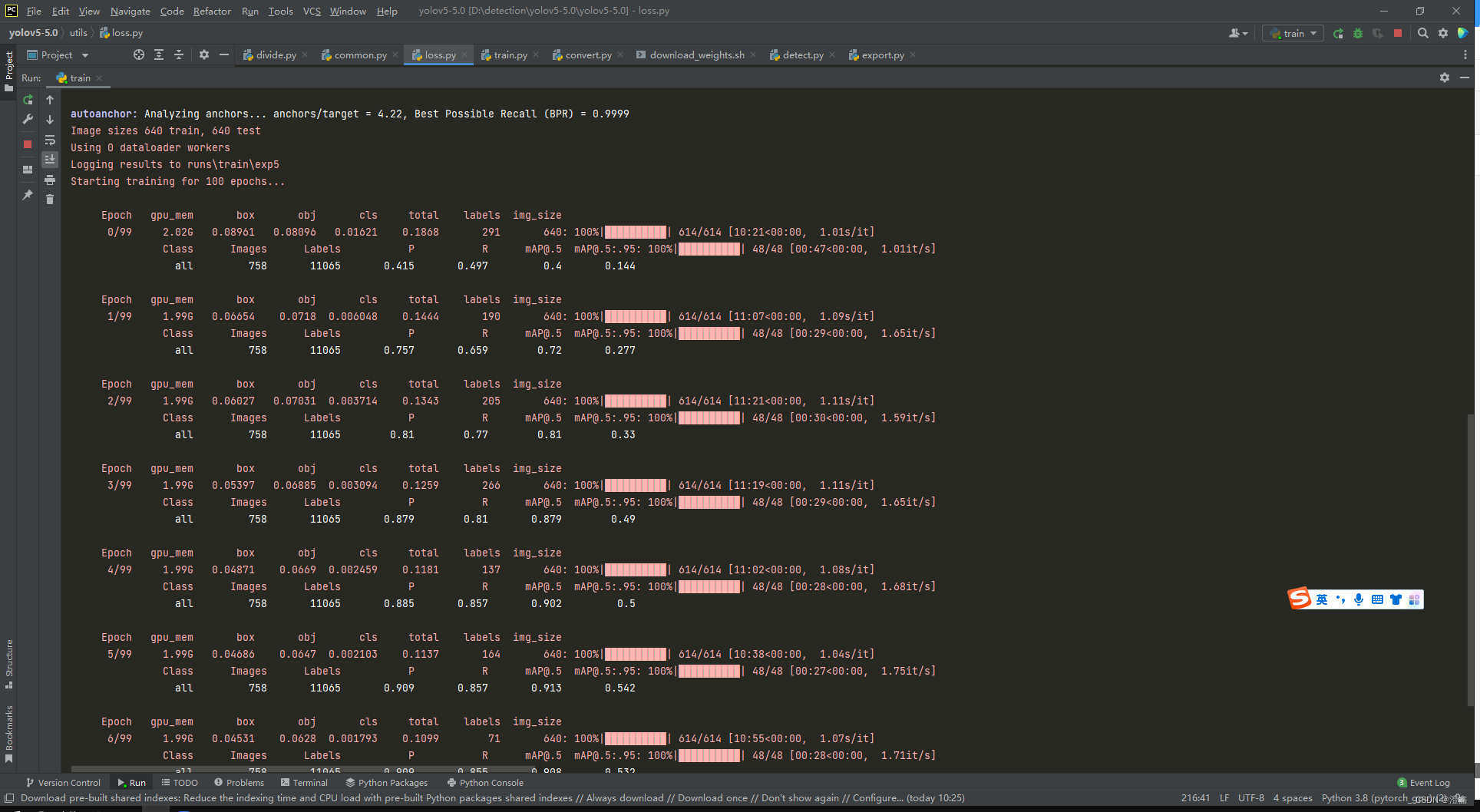
到此为止,不出意外的话,应该是可以训练起来了,我们就能看到终端界面的网络层和训练进度:
7.对图像的检测和对视频的检测
这里同样可以参照炮哥带你学中的预测部分,不得不说炮哥讲的真的非常好!

















 577
577











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











