







 本文介绍了使用ECO方法对带式输送机速度进行主动控制的过程,包括确定期望速度、选择加速度和调节时间。通过公式计算最大驱动力限制,优化仿真模型以确保系统性能,同时考虑到电机过热等因素。
本文介绍了使用ECO方法对带式输送机速度进行主动控制的过程,包括确定期望速度、选择加速度和调节时间。通过公式计算最大驱动力限制,优化仿真模型以确保系统性能,同时考虑到电机过热等因素。
带式输送机完成主动速度控制,首先要确定带式输送机调节后的期望速度(前面已经介绍过),其次是选择合适的加速度、调节时间使得带式输送机的速度达到期望速度。这里介绍一种ECO(estimation-computation-optimization)方法,顾名思义就是先估计,再计算,最后优化。这种ECO方法经常被用来确定速度调节的时间,它是首先估计参数的值,然后根据一些已知理论计算调节时间值,最后根据仿真/实际情况再试图找到参数的最佳数值。
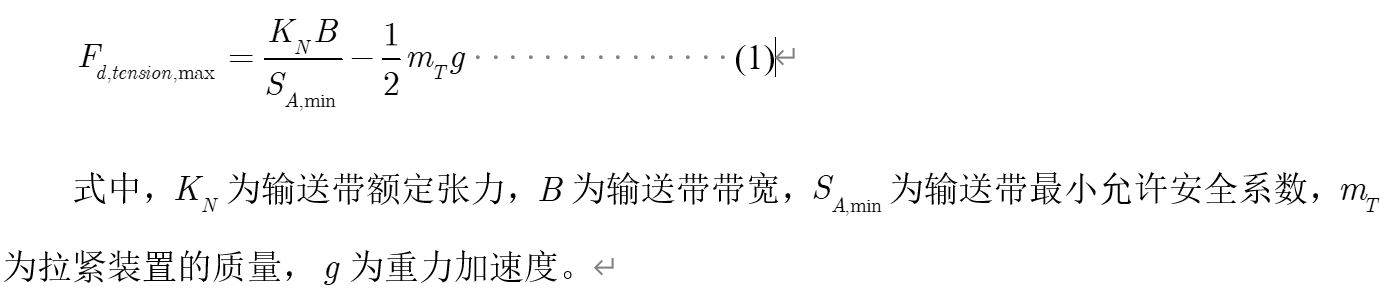
输送带的张力最大值往往出现在驱动滚筒的前端,带式输送机为避免输送带出现张紧风险所提供的最大驱动力 由下面公式(1)确定:
输送带与驱动滚筒之间不打滑的最大驱动力 由下面公式(2)确定:

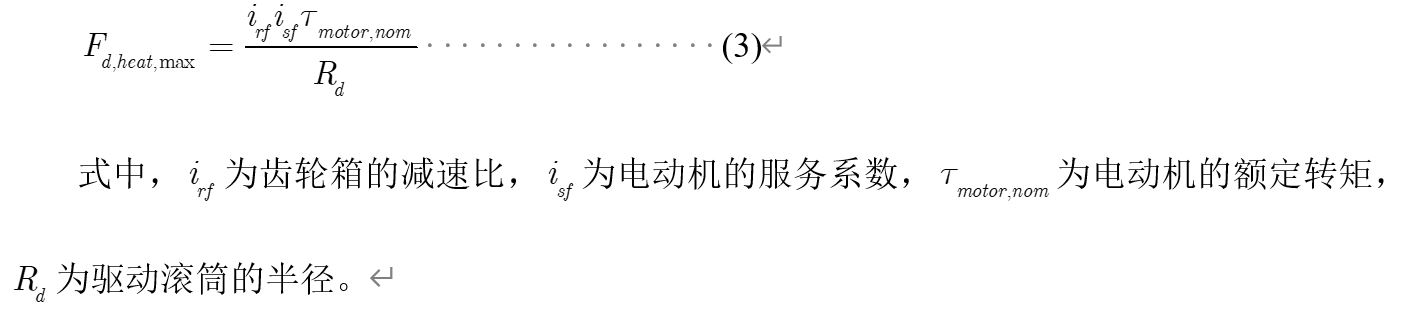
电动机工作过热的最大驱动力 由下面公式(3)确定:
充分考虑这三者情况后,带式输送机的最大瞬态运行的驱动力应该是这三种驱动力的最小值:

带式输送机的运动阻力由主阻力、二次阻力、倾斜阻力和特殊阻力组成,水平带式输送机的主阻力和二次阻力占总阻力的95%以上。因此,可以忽略水平带式输送机的倾斜阻力和特殊阻力,然后将主要阻力和二次阻力之和近似为:

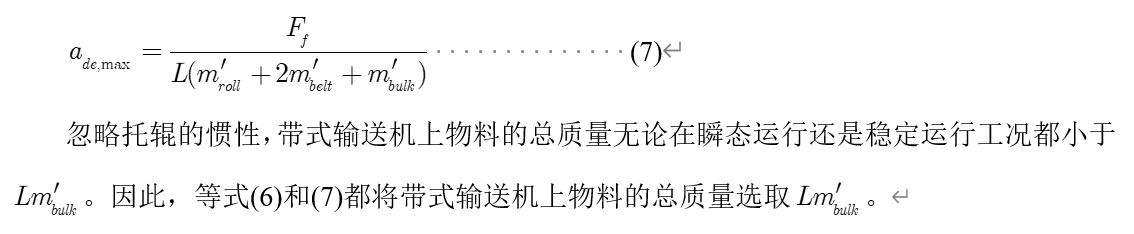
根据牛顿第二运动定律,带式输送机自身所能达到最大加速为:

驱动电机无法进行回馈制动操作时,带式输送机在减速期间的最大加速度由下式可得:
估算-计算部分已经完成,接下来就需要搭建带式输送机的仿真模型,重复以上步骤进行验证计算的结果是否要求,若不满足要求,则进一步优化结果。



















 8852
8852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











