







 伺服电机在控制系统中扮演重要角色,主要包括无刷直流电机(BLDC)和永磁同步电机(PMSM)。BLDC采用120度方波电流,而PMSM则采用正弦波电流。两者在电机本体、控制方式、传感器类型、反电势波形和三相电流波形上存在显著区别。尽管理论上BLDC可以使用三相正弦交流电,但实际操作可能带来性能损失和高谐波损耗。
伺服电机在控制系统中扮演重要角色,主要包括无刷直流电机(BLDC)和永磁同步电机(PMSM)。BLDC采用120度方波电流,而PMSM则采用正弦波电流。两者在电机本体、控制方式、传感器类型、反电势波形和三相电流波形上存在显著区别。尽管理论上BLDC可以使用三相正弦交流电,但实际操作可能带来性能损失和高谐波损耗。
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。在伺服系统中,能满足加工要求的快速响应性、控制精度和抗干扰性的电动 机称为伺服电机。只要能满足控制要求的电动机均可作为伺服电动机。
永磁同步电机可以根据不同的划分标准来进行不同的分类。根据电机具体结构、驱动电流波形和控制方式不同,永磁同步电机具有两种驱动模式:一种是方波电流驱动的永磁同步电机,称为无刷直流电机(BLDC);另一种是正弦波电流驱动,称为永磁同步电机(PMSM)
1.永磁同步电机(PMSM)
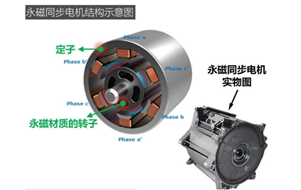
结构:主要是由转子,定子,及端盖等部件构成。
原理:在电动机的定子绕组中通入三相电流,在通入电流后,就会在电动机的定子绕组中形成旋转磁场,由于在转子上安装了永磁体,永磁体的磁极是固定的,根据磁极的同性相吸异性相斥的原理,在定子中产生的旋转磁场会
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3706
3706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









