







转载于:http://blog.csdn.net/hitwengqi/article/details/6922051
1、查找轮廓
轮廓(contour)到底是什么?
一个轮廓对应一系列的店,也就是图像中的一条曲线,OpenCV中一般用序列来存储轮廓信息,序列中的每一个元素是曲线中一个点的位置。
轮廓树?
OpenCV将得到的轮廓聚合成一个轮廓树,把轮廓的包含关系编码到树结构中,保护的轮廓在树中体现为节点。轮廓树有4种拓扑结构,CV_RETR_EXTERNAL、CV_RETR_CCOMP、CV_RETR_TREE、CV_RETR_LIST。
2、表示轮廓
轮廓只是序列所能表示的一种,轮廓类型CvContour是从CvSeq扩展而来,它还含有几个其他的成员,例如颜色、外包矩形区域等。
轮廓时点的序列,可以用来表示图像空间中的曲线,涉及到的几个处理函数如下:
cvFindContours(); //查找到所有轮廓后统一返回轮廓个数
cvStartFindContours(); //每次查找并返回一个轮廓
cvFindNextContour(); //查找剩余的轮廓
cvSubstituteContour(); //替换scannner指向的轮廓
cvEndFindContour(); //结束轮廓查找
cvApproxChains(); //将Freeman链转换为多边形表示,近似拟合。
Freeman链码
在链码中,多边形被表示为一系列的位移,每一个位移有8个方向。
通过以下函数读出每个点:
cvStartReadChainPoints(); //初始化Freeman链CvChainPtReader结构
cvReadChainPoint(); //读取每个点
3、绘制轮廓
在屏幕上绘制检测到的轮廓,用cvDrawContours函数。
例程:根据滑动条参数设置阈值检测轮廓。
--------------------------------------------------------------------------------------------------
cvCreateTrackbar
创建trackbar并将它添加到指定的窗口。
CV_EXTERN_C_FUNCPTR( void (*CvTrackbarCallback)(int pos) );
int cvCreateTrackbar( const char* trackbar_name, const char* window_name,
int* value, int count, CvTrackbarCallback on_change );
trackbar_name
被创建的trackbar名字。
window_name
窗口名字,这个窗口将为被创建trackbar的父对象。
value
整数指针,它的值将反映滑块的位置。这个变量指定创建时的滑块位置。
count
滑块位置的最大值。最小值一直是0。
on_change
每次滑块位置被改变的时候,被调用函数的指针。这个函数应该被声明为void Foo(int); 如果没有回调函数,这个值可以设为NULL。
函数cvCreateTrackbar用指定的名字和范围来创建trackbar(滑块或者范围控制),指定与trackbar位置同步的变量,并且指定当trackbar位置被改变的时候调用的回调函数。被创建的trackbar显示在指定窗口的顶端。
FindContours
在二值图像中寻找轮廓
int cvFindContours( CvArr* image, CvMemStorage* storage, CvSeq** first_contour,
int header_size=sizeof(CvContour), int mode=CV_RETR_LIST,
int method=CV_CHAIN_APPROX_SIMPLE, CvPoint offset=cvPoint(0,0) );
image
输入的 8-比特、单通道图像. 非零元素被当成 1, 0 象素值保留为 0 - 从而图像被看成二值的。为了从灰度图像中得到这样的二值图像,可以使用 cvThreshold, cvAdaptiveThreshold 或 cvCanny. 本函数改变输入图像内容。
storage
得到的轮廓的存储容器
first_contour
输出参数:包含第一个输出轮廓的指针
header_size
如果 method=CV_CHAIN_CODE,则序列头的大小 >=sizeof(CvChain),否则 >=sizeof(CvContour) .
mode
提取模式.
CV_RETR_EXTERNAL - 只提取最外层的轮廓
CV_RETR_LIST - 提取所有轮廓,并且放置在 list 中
CV_RETR_CCOMP - 提取所有轮廓,并且将其组织为两层的 hierarchy: 顶层为连通域的外围边界,次层为洞的内层边界。
CV_RETR_TREE - 提取所有轮廓,并且重构嵌套轮廓的全部 hierarchy
method
逼近方法 (对所有节点, 不包括使用内部逼近的 CV_RETR_RUNS).
CV_CHAIN_CODE - Freeman 链码的输出轮廓. 其它方法输出多边形(定点序列).
CV_CHAIN_APPROX_NONE - 将所有点由链码形式翻译(转化)为点序列形式
CV_CHAIN_APPROX_SIMPLE - 压缩水平、垂直和对角分割,即函数只保留末端的象素点;
CV_CHAIN_APPROX_TC89_L1,
CV_CHAIN_APPROX_TC89_KCOS - 应用 Teh-Chin 链逼近算法. CV_LINK_RUNS - 通过连接为 1 的水平碎片使用完全不同的轮廓提取算法。仅有 CV_RETR_LIST 提取模式可以在本方法中应用.
offset
每一个轮廓点的偏移量. 当轮廓是从图像 ROI 中提取出来的时候,使用偏移量有用,因为可以从整个图像上下文来对轮廓做分析.
函数 cvFindContours 从二值图像中提取轮廓,并且返回提取轮廓的数目。指针 first_contour 的内容由函数填写。它包含第一个最外层轮廓的指针,如果指针为 NULL,则没有检测到轮廓(比如图像是全黑的)。其它轮廓可以从 first_contour 利用 h_next 和 v_next 链接访问到。 在 cvDrawContours 的样例显示如何使用轮廓来进行连通域的检测。轮廓也可以用来做形状分析和对象识别 - 见CVPR2001 教程中的 squares 样例。该教程可以在 SourceForge 网站上找到。
--------------------------------------------------------------------------------------------------
/*code*/
- #include <cv.h>
- #include <highgui.h>
- IplImage* g_image = NULL;
- IplImage* g_gray = NULL;
- int g_thresh = 100; //阈值
- CvMemStorage* g_storage = NULL;
- void on_trackbar( int a );
- int main( int argc, char** argv )
- {
- if( ( argc != 2 ) || !( g_image = cvLoadImage( argv[1] ) ) )
- return -1;
- cvNamedWindow( "Contours", 1 );
- cvCreateTrackbar( "Threshold", "Contours", &g_thresh, 255, on_trackbar ); //滚动条设置阈值,得到的值存储到g_thresh中
- on_trackbar( 0 );
- cvWaitKey(0);
- return 0;
- }
- void on_trackbar( int a )
- {
- if( g_storage == NULL )
- {
- g_gray = cvCreateImage( cvGetSize( g_image ), 8, 1 );
- g_storage = cvCreateMemStorage(0);
- }
- else
- {
- cvClearMemStorage( g_storage );
- }
- CvSeq* contours = 0;
- cvCvtColor( g_image, g_gray, CV_BGR2GRAY ); //转换色彩空间,转为灰度图
- cvThreshold( g_gray, g_gray, g_thresh, 255, CV_THRESH_BINARY ); //阈值变换
- cvFindContours( g_gray, g_storage, &contours );
- cvZero( g_gray );
- if( contours )
- {
- cvDrawContours( g_gray, contours, cvScalarAll( 255 ), cvScalarAll( 255 ), 1 ); //绘制轮廓
- }
- cvShowImage( "Contours", g_gray );
- }
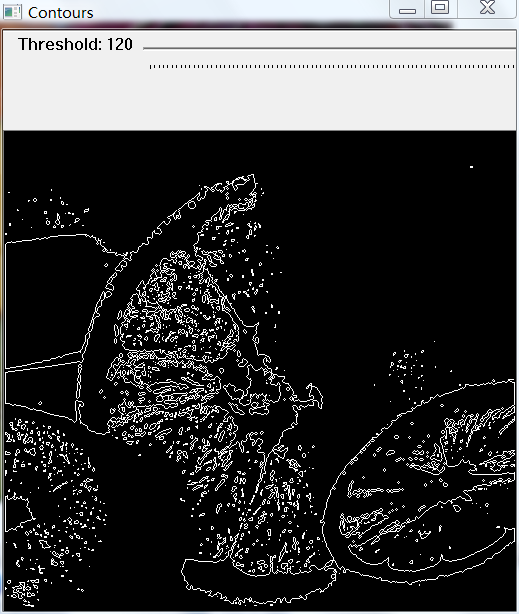
/*result*/
依旧是水果图
Threshold == 120
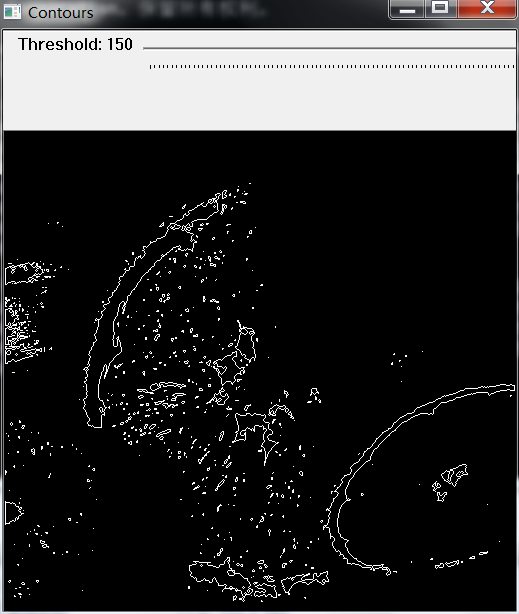
Threshold == 150
------------------------------------------------华丽的分割线-------------------------------------------------
/*在输入图像上寻找并绘制轮廓*/
/*code*/
- #include <highgui.h>
- #include <cv.h>
- #include <stdio.h>
- #define CVX_RED CV_RGB( 0xff, 0x00, 0x00 ) //宏定义
- #define CVX_GREEN CV_RGB( 0x00, 0xff, 0x00 )
- #define CVX_BLUE CV_RGB( 0x00, 0x00, 0xff )
- int main(int argc, char** argv)
- {
- cvNamedWindow( argv[0], 1 );
- IplImage* img_8uc1 = cvLoadImage( argv[1], CV_LOAD_IMAGE_GRAYSCALE );
- IplImage* img_edge = cvCreateImage( cvGetSize( img_8uc1 ), 8, 1 ); //单通道图
- IplImage* img_8uc3 = cvCreateImage( cvGetSize( img_8uc1 ), 8, 3 );
- cvThreshold( img_8uc1, img_edge, 128, 255, CV_THRESH_BINARY );
- CvMemStorage* storage = cvCreateMemStorage();
- CvSeq* first_contour = NULL;
- int Nc = cvFindContours( img_edge, storage, &first_contour, sizeof( CvContour ), CV_RETR_LIST ); //返回找到的轮廓数,并将第一个轮廓的序列返回到first_contour变量中
- int n = 0;
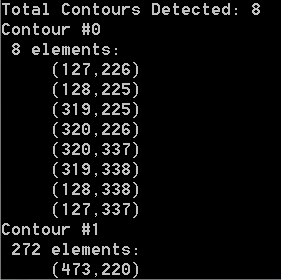
- printf( "Total Contours Detected: %d\n", Nc );
- for( CvSeq* c = first_contour; c != NULL; c = c -> h_next )
- {
- cvCvtColor( img_8uc1, img_8uc3, CV_GRAY2BGR );
- cvDrawContours( img_8uc3, c, CVX_RED, CVX_BLUE, 0, 2, 8 ); //绘制,CVX_RED是宏定义函数
- printf( "Contour #%d\n", n );
- cvShowImage( argv[0], img_8uc3 );
- printf( " %d elements:\n", c -> total );
- for( int i = 0; i < c -> total; ++i )
- {
- CvPoint* p = CV_GET_SEQ_ELEM( CvPoint, c, i );
- printf( " (%d,%d)\n", p -> x, p -> y ); //打印出序列的所有元素
- }
- cvWaitKey(0);
- n++;
- }
- printf( "Finished all contours.\n" );
- cvCvtColor( img_8uc1, img_8uc3, CV_GRAY2BGR );
- cvShowImage( argv[0], img_8uc3 );
- cvWaitKey(0);
- cvDestroyWindow( argv[0] );
- cvReleaseImage( &img_8uc1 );
- cvReleaseImage( &img_8uc3 );
- cvReleaseImage( &img_edge );
- return 0;
- }
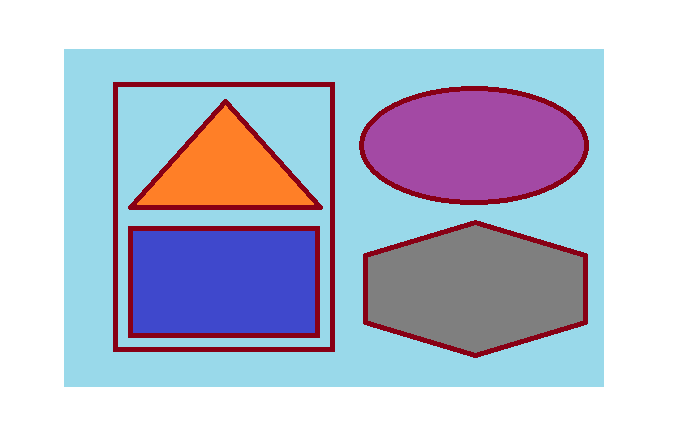
/*result*/
source image
contour 1
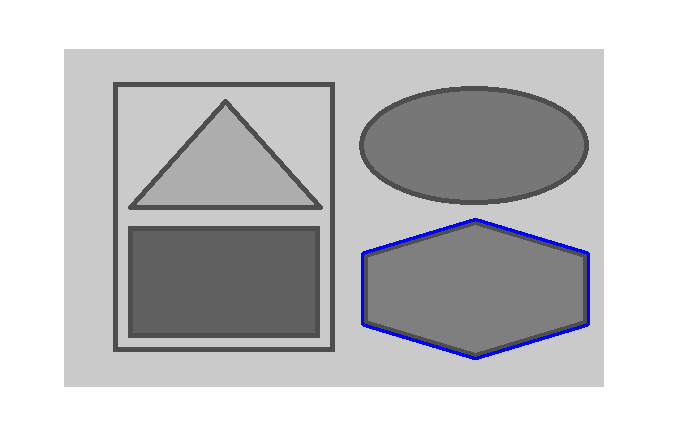
contour 2
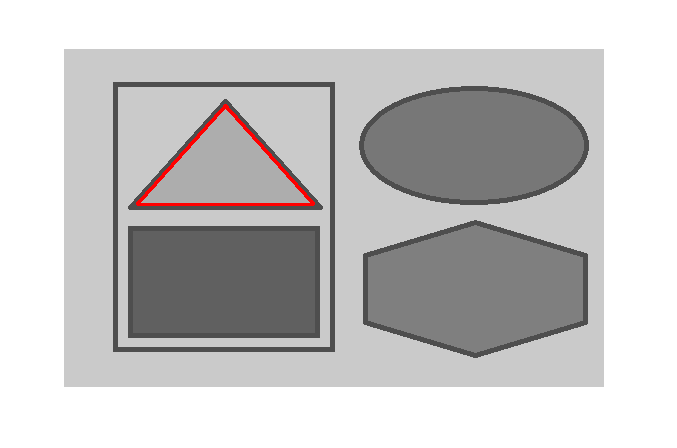
8 contours
本小节学习轮廓的常用操作,识别和处理,深入理解轮廓的相关算法及原理。
1. 多边形逼近
当需要对图像进行形状分析时,需要使用多边形逼近一个轮廓,使得顶点数目变少,算法原理比较简单,核心就是不断找多边形最远的点加入形成新的多边形,直到最短距离小于指定的精度。OpenCV里面用函数cvApproxPoly()实现。
ApproxPoly
用指定精度逼近多边形曲线
CvSeq* cvApproxPoly( const void* src_seq, int header_size, CvMemStorage* storage,
int method, double parameter, int parameter2=0 );
src_seq
点集数组序列
header_size
逼近曲线的头尺寸
storage
逼近轮廓的容器。如果为 NULL, 则使用输入的序列
method
逼近方法。目前仅支持 CV_POLY_APPROX_DP , 对应 Douglas-Peucker 算法.
parameter
方法相关参数。对 CV_POLY_APPROX_DP 它是指定的逼近精度
parameter2
如果 src_seq 是序列,它表示要么逼近单个序列,要么在 src_seq 的同一个或低级层次上逼近所有序列 (参考 cvFindContours 中对轮廓继承结构的描述). 如果 src_seq 是点集的数组 (CvMat*) , 参数指定曲线是闭合 (parameter2!=0) 还是非闭合 (parameter2=0).
函数 cvApproxPoly 逼近一个或多个曲线,并返回逼近结果。对多个曲线的逼近,生成的树将与输入的具有同样的结构。(1:1 的对应关系).
2. 轮廓的特性概括
轮廓包括一些特性,长度、矩形边界框、面积、圆形和椭圆形边界,轮廓钜等。
3. 轮廓的匹配
实际应用中会有两个轮廓的匹配比较相似度,或者比较一个轮廓和一个抽象模板的的相似度。
简单的方式是比较两个轮廓的轮廓矩。
矩的定义:通过对轮廓上所有点进行积分运算。
计算轮廓矩:cvContoursMoments
归一化的矩(重要):不同大小但是形状相同的物体轮廓应有相同的矩。因此在比对轮廓相似度时通常使用归一化的矩,Hu矩是其中一种较好的方法。但是有一个问题,为什么每个图像要对应7个hu矩呢?
使用Hu矩进行匹配:
double cvMatchShapes( const void* object1, const void* object2, int method, double parameter=0 )
等级匹配:
用相似度量度来计算轮廓所有匹配的部分,这就要用到轮廓树,这里的轮廓树不是cvFindContours()函数返回的多个轮廓的继承描述,而是描述一个特定形状(不是多个特定形状)内各部分的等级关系,建立轮廓树的算法很巧妙,要掌握这种思想(见书page285),最后产生的轮廓树是一个二分树。
如图所示的轮廓树,每个节点表示一个三角形,父节点是子节点合并形成的新的三角形:

轮廓的凸包和凸缺陷:
概念很简单,见图就可理解,箭头指的区域就是缺陷,整个手的外部多边形就是凸包。

有三个对应的操作函数:
CvSeq* cvConvexHull2( const CvArr* input, void* hull_storage=NULL,int orientation=CV_CLOCKWISE, int return_points=0 ); //简单计算已知轮廓的凸包
int cvCheckContourConvexity( const CvArr* contour ); //测试轮廓的凸性
CvSeq* cvConvexityDefects( const CvArr* contour, const CvArr* convexhull,CvMemStorage* storage=NULL ); //发现轮廓凸形缺陷
成对几何直方图(PGH):实际上是链码编码直方图(CCH)的一个扩展,CCH是一种直方图,用来统计一个轮廓的Freeman链码编码每一种走法的数字。(Freeman的设计很巧妙,他是对一个多边形的描述,规定8给方向的移动,每个这样的移动有固定的长度和特定的方向,参见page 266)
如图Freeman编码,旋转45度,只需将链码循环平移一个单位即可:

PGH的设计也很好,它规定多边形上的每两个边都有一个夹角、一个最小距离和一个最大距离,并且这些数字被编码到一个二维直方图,无论如何旋转图像,改变图像的大小,直方图都不变,都能得到匹配,即旋转不变性。
如图所示:
















 8051
8051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









