







https://download.csdn.net/download/yjw0911/19827907下载链接
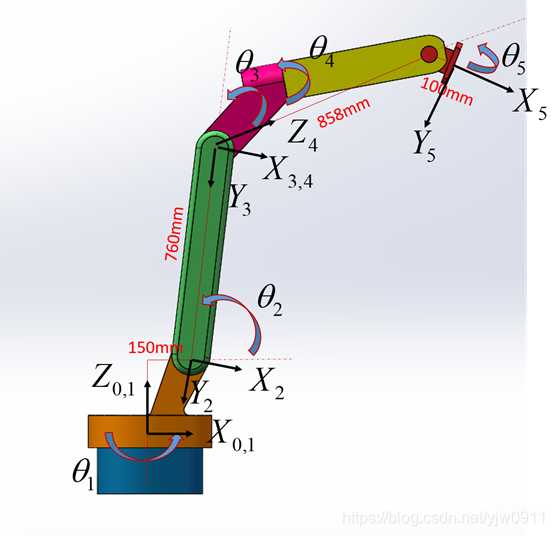
1、五自由度机器人运动学分析
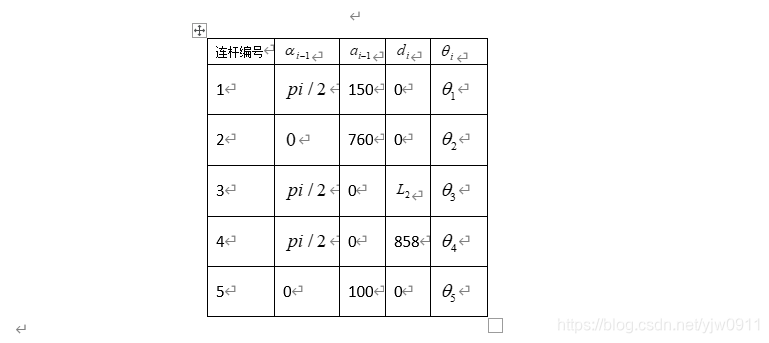
连杆编号
由此可得
所以,坐标系{4}相对于基坐标系的变换矩阵为: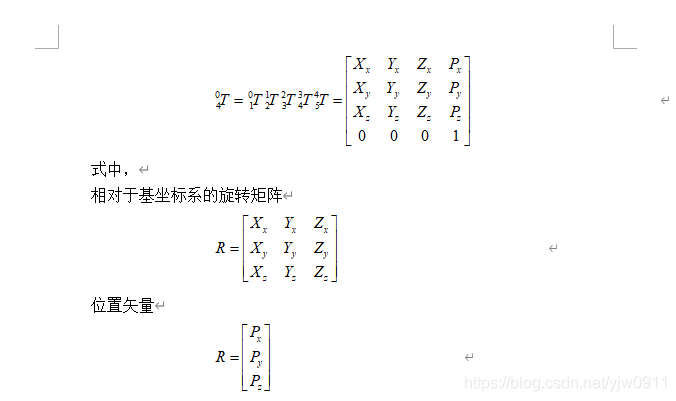
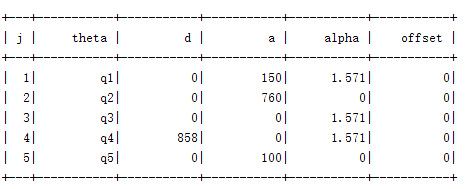
二、robotic toolbox工具机器人建模
clear
clc
% theta d a alpha sigma
L(1)=Link([0 0 150 pi/2 0])https://download.csdn.net/download/yjw0911/19827907下载链接
1、五自由度机器人运动学分析
连杆编号
由此可得
所以,坐标系{4}相对于基坐标系的变换矩阵为:
二、robotic toolbox工具机器人建模
clear
clc
% theta d a alpha sigma
L(1)=Link([0 0 150 pi/2 0])
 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1003
1003







