










直线拟合
很早就想学习拟合了,经常听同事用到拟合,当时尚且一窍不通,必须快递加急紧追此处才是,也参考了网上大佬的一些宝贵经验,先将拟合方法总结如下:
最小二乘法
1.原理
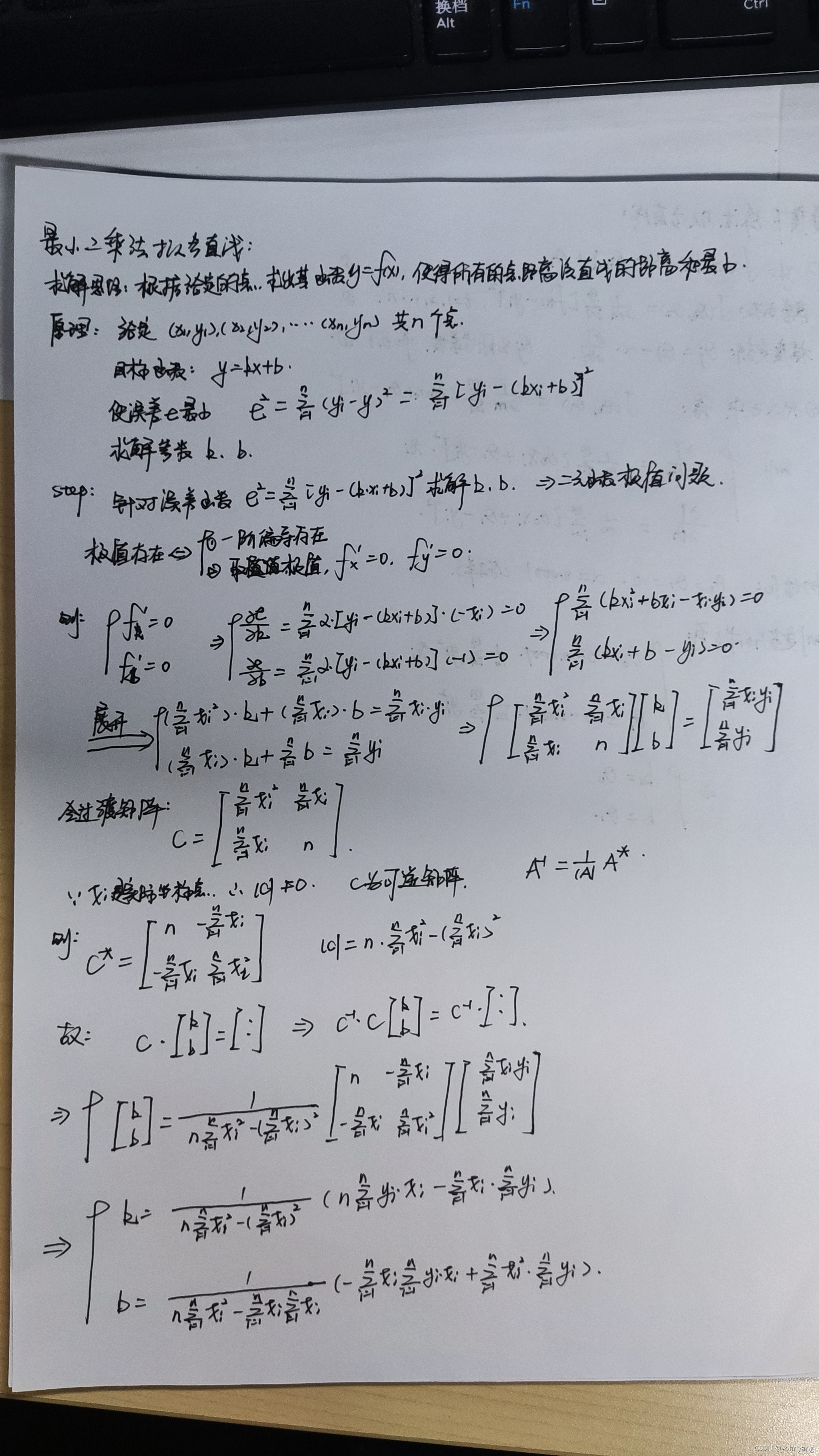
2.举例实现
void fitline3(){
float b = 0.0f, k=0.0f;
vector<Point>points;
points.push_back(Point(27, 39));
points.push_back(Point(8, 5));
points.push_back(Point(8, 9));
points.push_back(Point(16, 22));
points.push_back(Point(44, 71));
points.push_back(Point(35, 44));
points.push_back(Point(43, 57));
points.push_back(Point(19, 24));
points.push_back(Point(27, 39));
points.push_back(Point(37, 52));
Mat src = Mat::zeros(400, 400, CV_8UC3);
for (int i = 0; i < points.size(); i++)
{
//在原图上画出点
circle(src, points[i], 3, Scalar(0, 255, 0), 1, 8);
}
int n = points.size();
double xx_sum = 0;
double x_sum = 0;
double y_sum = 0;
double xy_sum = 0;
for (int i = 0; i < n; i++)
{
x_sum += points[i].x; //x的累加和
y_sum += points[i].y; //y的累加和
xx_sum += points[i].x * points[i].x; //x的平方累加和
xy_sum += points[i].x * points[i].y; //x,y的累加和
}
k = (n*xy_sum - x_sum * y_sum) / (n*xx_sum - x_sum * x_sum); //根据公式求解k
b = (-x_sum * xy_sum + xx_sum*y_sum) / (n*xx_sum - x_sum * x_sum);//根据公式求解b
printf("k = %f, b = %f\n", k, b); //k = 1.555569, b = -4.867031
cv::Point first = { 5, int(k * 5 + b) }, second = { int((400 - b) / k), 400 };
cv::line(src, first, second, cv::Scalar(0, 0, 255), 2);
cv::imshow("name", src);
cv::waitKey(0);
}
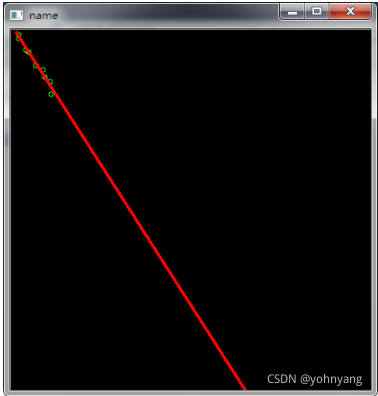
上面求解出来的结果是k = 1.555569, b = -4.867031。
图像显示结果为:
3.使用opencv自带的函数求解k和b值
void fitline1()
{
vector<Point>points;
//(27 39) (8 5) (8 9) (16 22) (44 71) (35 44) (43 57) (19 24) (27 39) (37 52)
points.push_back(Point(27, 39));
points.push_back(Point(8, 5));
points.push_back(Point(8, 9));
points.push_back(Point(16, 22));
points.push_back(Point(44, 71));
points.push_back(Point(35, 44));
points.push_back(Point(43, 57));
points.push_back(Point(19, 24));
points.push_back(Point(27, 39));
points.push_back(Point(37, 52));
Mat src = Mat::zeros(400, 400, CV_8UC3);
for(int i=0;i<points.size();i++)
{
cicle(src,points[i],3,Scalar(0,0,255),1,8);
}
//构建A矩阵
int N=2;
Mat A=Mat::zeros(N,N,CV_64FC1);
for (int row = 0; row < A.rows; row++)
{
for (int col = 0; col < A.cols; col++)
{
for (int k = 0; k < points.size(); k++)
{
A.at<double>(row, col) = A.at<double>(row, col) + pow(points[k].x, row + col);
}
}
}
//构建B矩阵
Mat B = Mat::zeros(N, 1, CV_64FC1);
for (int row = 0; row < B.rows; row++)
{
for (int k = 0; k < points.size(); k++)
{
B.at<double>(row, 0) = B.at<double>(row, 0) + pow(points[k].x, row)*points[k].y;
}
}
//A*X=B
Mat X;
//cout << A << endl << B << endl;
solve(A, B, X, DECOMP_LU);
cout << X << endl;
vector<Point>lines;
for (int x = 0; x < src.size().width; x++)
{ // y = b + ax;
double y = X.at<double>(0, 0) + X.at<double>(1, 0)*x; //b = -4.867031, k = 1.555569,
printf("b = %f, k = %f, (%d,%lf)\n", X.at<double>(0, 0), X.at<double>(1, 0), x, y);
lines.push_back(Point(x, y));
}
polylines(src, lines, false, Scalar(255, 0, 0), 1, 8);
imshow("src", src);
//imshow("src", A);
waitKey(0);
}
梯度下降法
1.原理

2.举例实现
//梯度下降法进行线性拟合
// y = theta0 * x + theta1
void fitline4(){
const int m = 10;
double Train_set_x[m] = { 27, 8, 8, 16, 44, 35, 43, 19, 27, 37 };
double Train_set_y[m] = { 39, 5, 9, 22, 71, 44, 57, 24, 39, 52 };
//alpha是学习率,error是结束误差,theta0就是k,theta1就是b。
double theta0 = 0.0, theta1 = 0.0, alpha = 0.002, error = 1e-8;
double tmp_theta0 = theta0, tmp_theta1 = theta1;
double sum_theta0 = 0.0, sum_theta1 = 0.0;
while (1){
sum_theta0 = 0.0, sum_theta1 = 0.0;
for (size_t i = 0; i < m; i++) {
sum_theta0 += (theta0 * Train_set_x[i] + theta1 - Train_set_y[i])*Train_set_x[i];
sum_theta1 += (theta0 * Train_set_x[i] + theta1 - Train_set_y[i]); //累加和
}
theta0 = theta0 - alpha * (1.0 / m) * sum_theta0; //k更新公式
theta1 = theta1 - alpha * (1.0 / m) * sum_theta1; //b更新公式
printf("k=%lf, b=%lf\n", theta0, theta1);
if (abs(theta0 - tmp_theta0) < error && abs(theta1 - tmp_theta1) < error){ //
break;
}
tmp_theta0 = theta0;
tmp_theta1 = theta1;
}
}
结果:
参考:
1.https://blog.csdn.net/stf1065716904/article/details/107594710
2.https://blog.csdn.net/LaplaceSmoothing/article/details/94581854?utm_medium=distribute.pc_relevant.none-task-blog-2defaultCTRLISTdefault-2.no_search_link&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2defaultCTRLISTdefault-2.no_search_link















 2126
2126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











