









24年5月来自俄罗斯莫斯科研究机构的论文“Co-driver: VLM-based Autonomous Driving Assistant with Human-like Behavior and Understanding for Complex Road Scenes”。
关于基于大语言模型的自动驾驶解决方案的最新研究,显示了规划和控制领域的前景。 然而,大量的计算资源和大语言模型的幻觉继续阻碍预测精确轨迹和指示控制信号的任务。 为了解决这个问题,本文提出了Co-driver,这是一种自动驾驶辅助系统,能够根据对道路场景的理解,使自动驾驶车辆能够调整驾驶行为。 提出一个涉及 CARLA 模拟器和ROS2的流水线,验证系统的有效性,利用单个 Nvidia 4090 24G GPU,同时利用视觉-语言模型的文本输出能力。 此外,还提供一个包含图像集和相应提示集的数据集,用于微调系统的视觉-语言模型模块。 Co-driver 数据集将在 https://github.com/ZionGo6/Co-driver 发布。
如图所示:视觉语言模型模块接收图像输入和系统提示,以行为树格式发布环境分析和指令结果。 然后根据对环境的分析,将指令结果的行为树映射到智体行为。
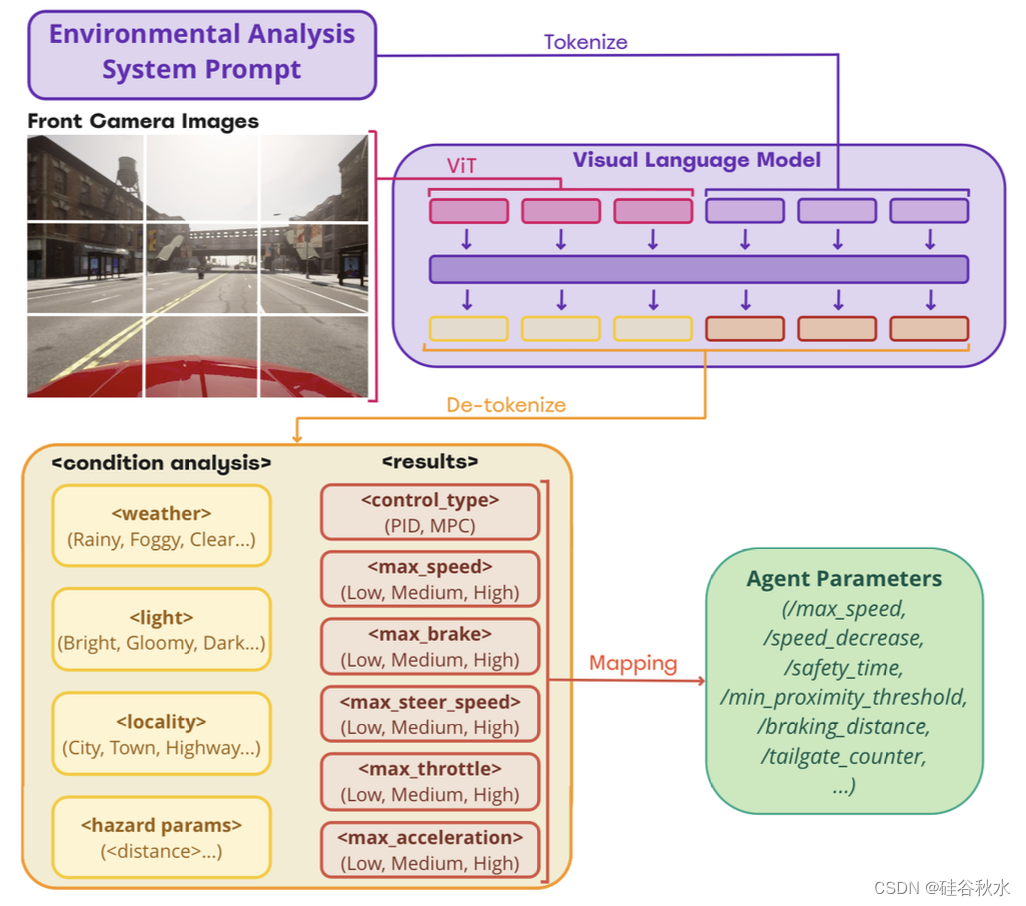
系统的主要任务是分析来自自车前置摄像头的视觉输入,并得出有关天气、光线、路面、地点等环境信息的结论,以及控制参数,例如最大速度、最大制动、最大油门等。基于视觉数据确定自动驾驶汽车的驾驶行为对于视觉语言模型来说是一项复杂的任务。 然而,将任务分解为两步过程,它就变得易于管理。
该任务被分解为将图像数据集中专门定义的场景提供给模型去识别图像中的环境信息,并根据所描述的环境数据来预测控制和行为参数的水平。 这两项任务对微调的视觉语言模型都没有构成重大挑战,这确保了提出的系统实际实施流程。
在上述任务的第一步中,视觉语言模型模块接收包含任务描述和目的地的系统提示,以及来自自车前置摄像头的图像。 在此阶段,该模块会识别位置、照明和天气条件以及前方的潜在危险。 然后,模块在第一步确定的环境参数的指导下继续生成控制和驾驶行为参数的级别。 最后,基于视觉语言模型模块的图像输入,所有获得的参数都被映射为一组智体行为,改变和影响 CARLA 模拟器中自车的驾驶风格。
图像数据集是在 CARLA 模拟器中从自车的前置摄像头视图中收集的,在定义的天气(晴朗、下雨、有雾)、光线(明亮、阴暗、黑暗)、地点(城市、城镇、高速公路)条件下, 关于前方潜在障碍物的安全和不安全距离的分类[18]。
在提示数据集中,系统提示是从驾驶员的角度作为完成驾驶任务的请求和环境信息的通知而给出的。 然后,将定义的环境信息以及关于控制类型、最大速度、最大制动、最大油门、最大加速度和最大转向速度的车辆控制和驾驶行为建议作为行为树格式的输出提示。 如图所示数据集的一点示例。

系统的视觉-语言模型(VLM)是在 Qwen-VL 架构的基础上利用QLoRA方法 [22] 进行训练的,是一个参数高效微调(PEFT)的一种形式 [23]。在训练过程中,视觉编码器的权重保持冻结,专注于优化模型的语言方面。
训练在单个 Nvidia RTX 4090 GPU 上进行,该 GPU 提供 24 GB 视频内存用于处理。该数据集总共包含 221,228 个样本,被分为每批 6 个样本,以保持高效的训练吞吐量。此外,梯度累积步骤设置为 8,导致一个epoch包含大约 4,600 个步骤。
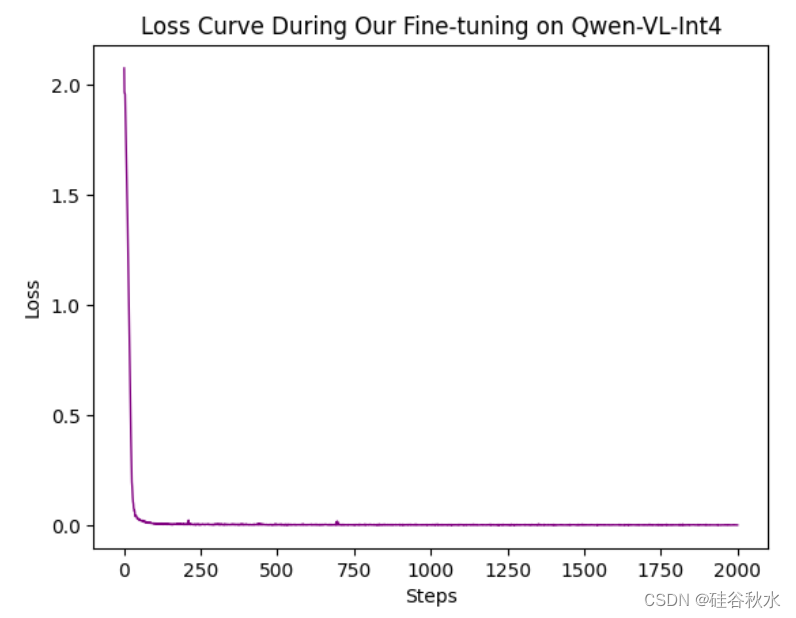
在学习率为 1e-4 的情况下,模型快速适应目标突发能力并响应所需的格式。这一过程只需要一个 epoch 的训练,大约需要 25 个小时才能完成。尽管训练时间相对较短,但该方法被证明是有效的,在模型性能和输出质量方面产生了令人满意的结果。
训练过程的进展如图所示的训练曲线所示,其展示了损失随时间的变化,并提供了对模型学习动态的深入了解。
为了验证系统的有效性,进行两种类型的实验。首先,在 CARLA 中,使用可调整的天气、地图和交通设置创建了测试场景。在测试模拟运行期间,视觉语言模型模块处于打开状态,读取自车的前方图像并执行场景理解和行为指令。记录带有车辆轨迹和车辆状态信息(例如速度、加速度等)的驾驶场景。其次,用暗光的真实驾驶场景验证系统的视觉-语言模型模块在HawkDrive数据集[24]上夜间条件的泛化能力 。















 1745
1745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









