







1实习目的 1
2实习内容 1
3实习具体过程 1
3.1 LAS格式点云数据介绍 1
3.2点云数据处理 2
3.1.1 点云数据读取 2
3.1.2 点云数据内容写入TEXT文件 3
3.3机载LiDAR点云数据道路特征 3
3.4基于高程属性的道路点云信息提取 4
4结果分析 5
5课程体会 6
参考文献 7
1实习目的
通过本次实习了解车载激光移动系统获取点云数据的特点、点云数据的存储格式、点云数据不同目标特征以及点云数据目标分割的方法。利用Matlab,VC++等软件实现点云数据的数据处理,包括读取,分割,存储等等。实习想要达到的目标:
(1) 对点云数据有大概的了解,包括点云数据可以用来分析什么,从点云数据中能获取什么对我们有用的信息。
(2) 了解点云数据读取,处理方法及存储方式。
(3) 掌握matlab和VC++平台的混合编程,主要掌握通过编程提取各种目标点云数据。
(4) 熟悉Quick Terrain Reader软件用于显示点云数据,并了解.las数据格式
2实习内容
首先是掌握点云数据一些特征,获取等。然后熟悉并掌握Quick Terrain Reader、RealWorks和matlab的基本命令。熟悉点云常用存储格式.xyz, .ply和.las,重点是.las 格式。)读取数据ARRA-CA_SanFranCoast_2010_10SEG5082.las中的点的信息,将点云数据以X、Y、Z、I 4个字段的内容写入文本文件(.txt)。利用Matlab编写一些小代码,实现对点云数据的提取,数据处理。利用Quick Terrain Reader软件来显示点云数据,其中包括使用不同的分割法来显示点云、查看点云数据模型的不同统计量等。选取自己感兴趣的目标进行点云提取,对提取结果分析。我选取道路作为提取目标,根据道路特征提取道路的主要信息,并对其进行分析。
3实习具体过程
3.1 LAS格式点云数据介绍
LAS文件格式由ASPRS制定。ASPRS[1]制定LAS文件格式的目的是为LIDAR数据的提供者和不同的应用开发者提供一套标准的数据交换格式,解决不同厂商及应用者之间的数据兼容问题,从而推动机载激光雷达测量技术的发展。LAS格式最早的版本是2003年5月的Version1.0,其后,ASPRS于2005年3月推出Version1.1,2008年推出Version1.2,2010年推出Version1.3,2013年7月推出Version1.4-R13。LAS[2]文件是一个二进制文件,版本1.0-1.2由3部分组成:公共头域、变长记录域和点数据域。在LAS 1.3中,增加了波形数据包记录域(Waveform Data Packet Record),该记录域可以紧跟点云数据域后面,称为“扩展变长记录域(Extended Variable Length Record)”,也可以单独位于一个辅助文件内。在LAS 1.4中,进一步扩充了扩展变长记录域的功能。
3.2点云数据处理
3.1.1 点云数据读取
点云数据读取通过Matlab实现,在读取结果中过去相应的数据。实现的部分代码如图1,读取结果如图2。从结果中可以看出:版本号为:1.2000,点的数量为:195658,点数据记录长度为28,公共头文件长度为227。
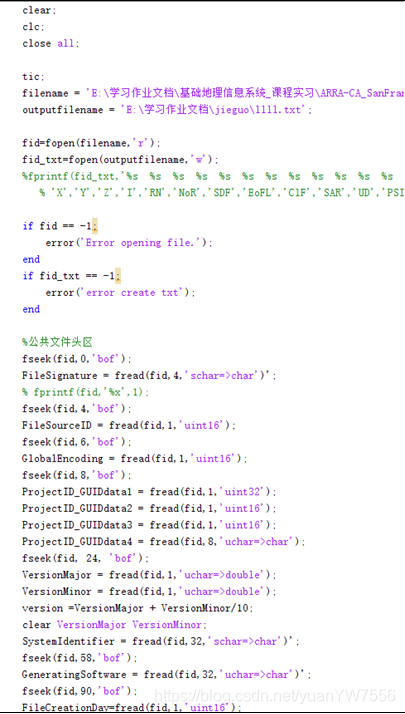
图1读取的代码
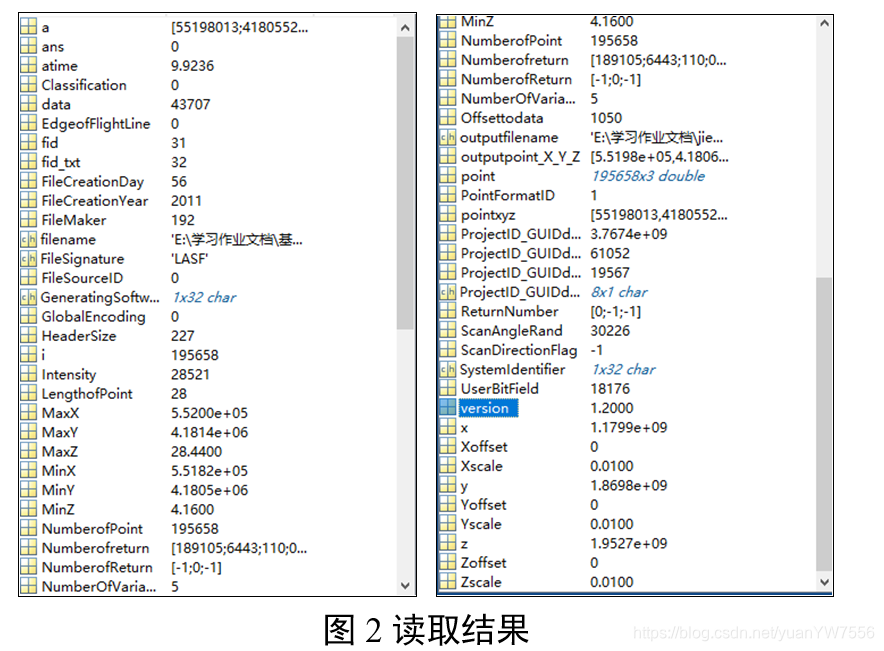
图2读取结果
3.1.2 点云数据内容写入TEXT文件
LAS格式点云数据在利用Matlab进行读取的时候,我已将结果输出为text文件格式,实现的代码如下图3,只截取了部分代码,输出结果如图4。从text文件中可以看出点云数据的四个参数的值。
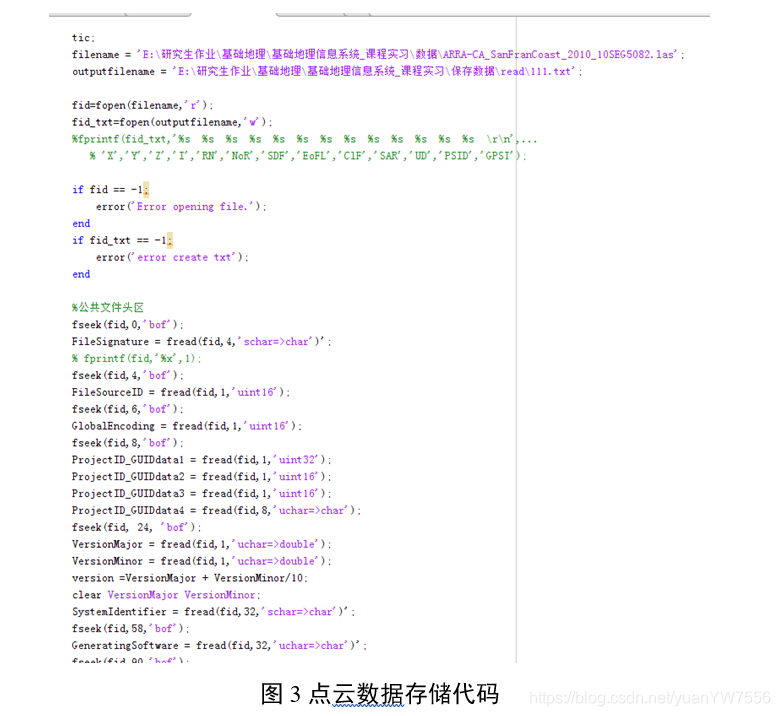
图3点云数据存储代码
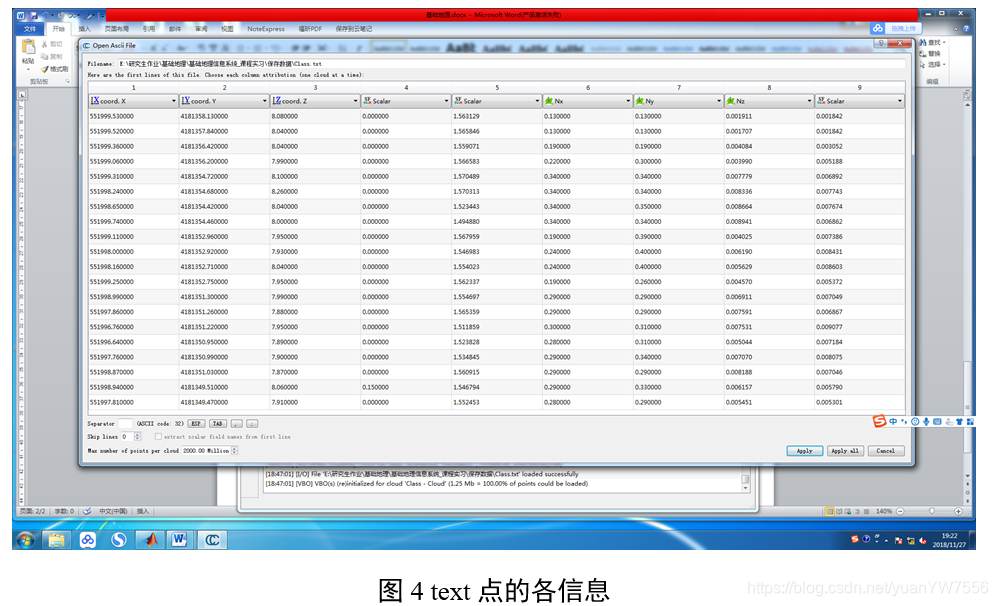
图4 text点的各信息
3.3机载LiDAR点云数据道路特征
在车载激光点云数据中,城区道路点云数据具有其特定的特征[3]:
(1)道路点云的高程与地面接近,但是低于周围地物,如房屋、树木等;
(2)道路的材质一般为混凝土或者沥青,其在点云数据中强度特征明显区别于建筑物、植被等;
(3)道路在几何形状上,其点云基本呈条带状分布。
3.4基于高程属性的道路点云信息提取
(1)数据来源以及数据结果存储路径如图5。
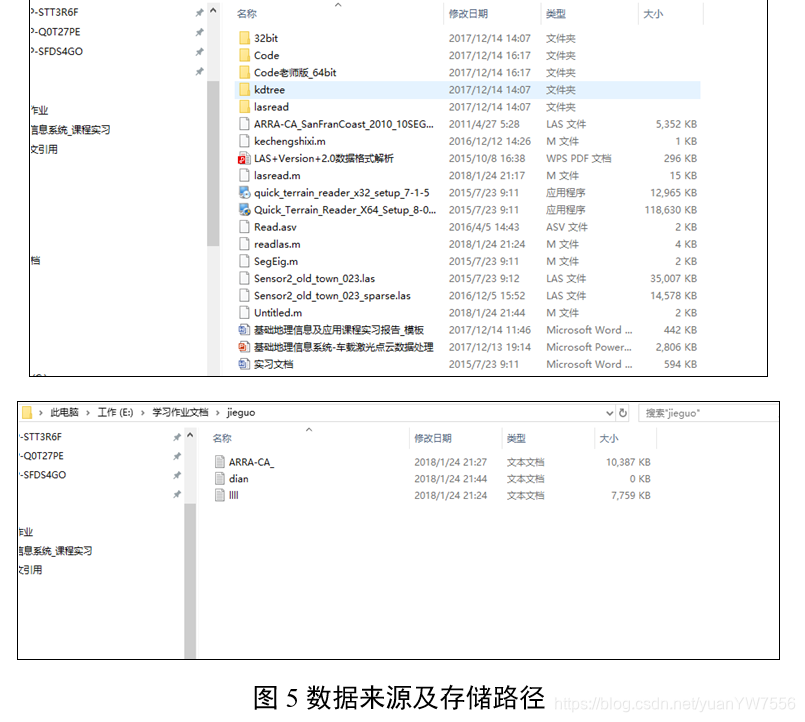
图5数据来源及存储路径
(2)基于高程属性的道路点云信息提取在Matlab中实现的代码如图6,代码运行结果如图7所示。
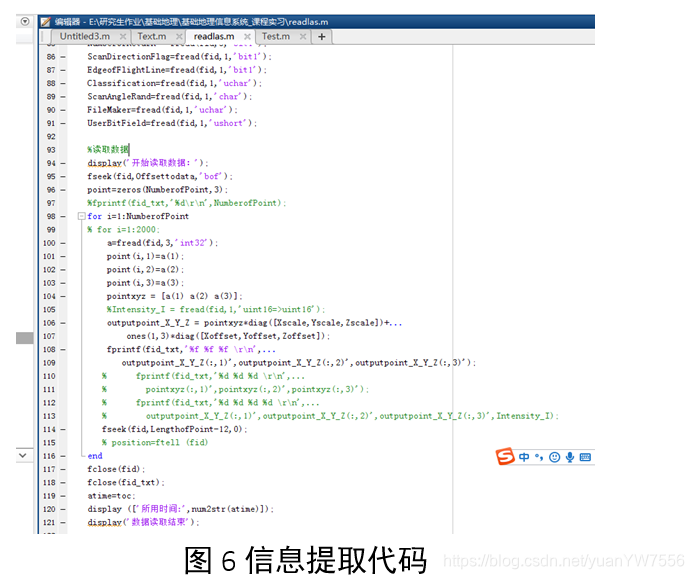
图6信息提取代码
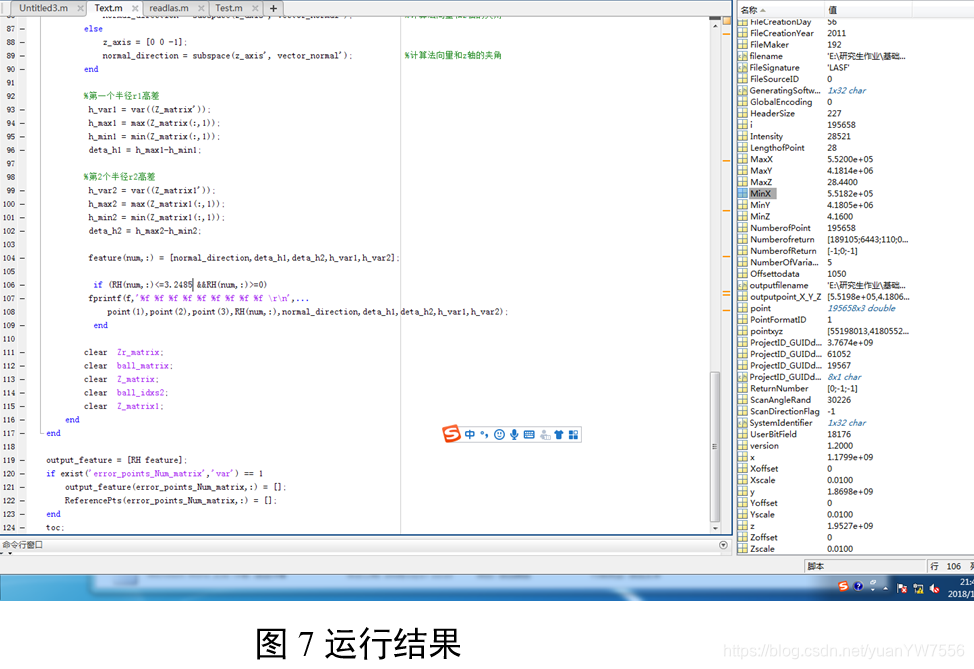
图7运行结果
4结果分析
聚类[4]是将数据分类到不同的类或者簇这样的一个过程,所以同一个簇中的对象有很大的相似性,而不同簇间的对象有很大的相异性。它将个体(样品)或者对象(变量)按相似程度(距离远近)划分类别,使得同一类中的元素之间的相似性比其他类的元素的相似性更强。目的在于使类间元素的同质性最大化和类与类间元素的异质性最大化。其主要依据是聚到同一个数据集中的样本应该彼此相似,而属于不同组的样本应该足够不相似。通过聚类的方法将图片上一些类别区分出来。聚类后的结果:从图8中课题看出与未处理的图相比,处理后的结果纹理比较清楚,图上大多细小的点被除去,道路特征表现的更加明显。
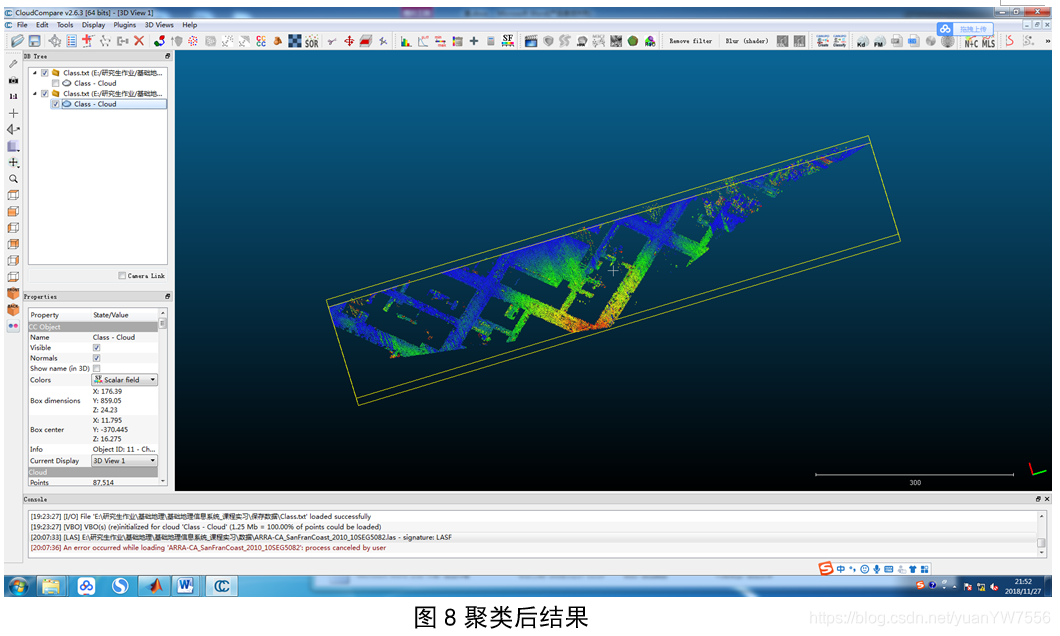
图8聚类后结果
5课程体会
通过这次实习,对激光雷达获取的点云数据有了更近一步理解。点云数据包含的数据量非常大,有时候我们处理时要对其进行分割。本次实习学会了利用点云数据对道路的提取。结果虽然不是很理想,但总体还是把道路提取出来了,通过调色让道路特征变得比较明显。同时也让我补了一下编程的知识,我编程能力不强,好多代码都看不懂,然而在经过多次实践和认真的学习下,我还是掌握了一些基本的知识,这不管对我今后学习,还是工作都提供很大帮助。最后非常感谢老师,让我们对激光雷达不在陌生,让我们比较深刻理解了点云数据一些简单的处理和信息的获取。
参考文献
[1] 熊爱武. 基于车载激光点云数据的道路模型重建[J]. 地理信息世界, 2013(6):86-88.
[2] 徐景中, 万幼川, 赖祖龙.机载激光雷达数据中道路中线的多尺度提取方法[J]. 红外与激光工程, 2009, 38(6):1099-1103.
[3] 李婷, 詹庆明, 喻亮. 基于地物特征提取的车载激光点云数据分类方法[J]. 国土资源遥感, 2012(1):17-21.
[5]李武奇, 袁磊. 基于机载LiDAR点云的道路点滤波提取方法研究[J]. 计算机与数字工程, 2016, 44(4):671-674.
[6]陈飞. 基于机载LiDAR点云的道路提取方法研究[D]. 西南交通大学, 2013.














 376
376











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









