







 本文聚焦于Mobileye的自动驾驶方案,其独特之处在于不依赖物体预测,而是利用机器学习定义语义状态空间,并结合蒙特卡洛树搜索和强化学习进行路径规划,所需算力仅为感知模块的1%。
本文聚焦于Mobileye的自动驾驶方案,其独特之处在于不依赖物体预测,而是利用机器学习定义语义状态空间,并结合蒙特卡洛树搜索和强化学习进行路径规划,所需算力仅为感知模块的1%。
本文资料来自于Shashua教授的演讲。
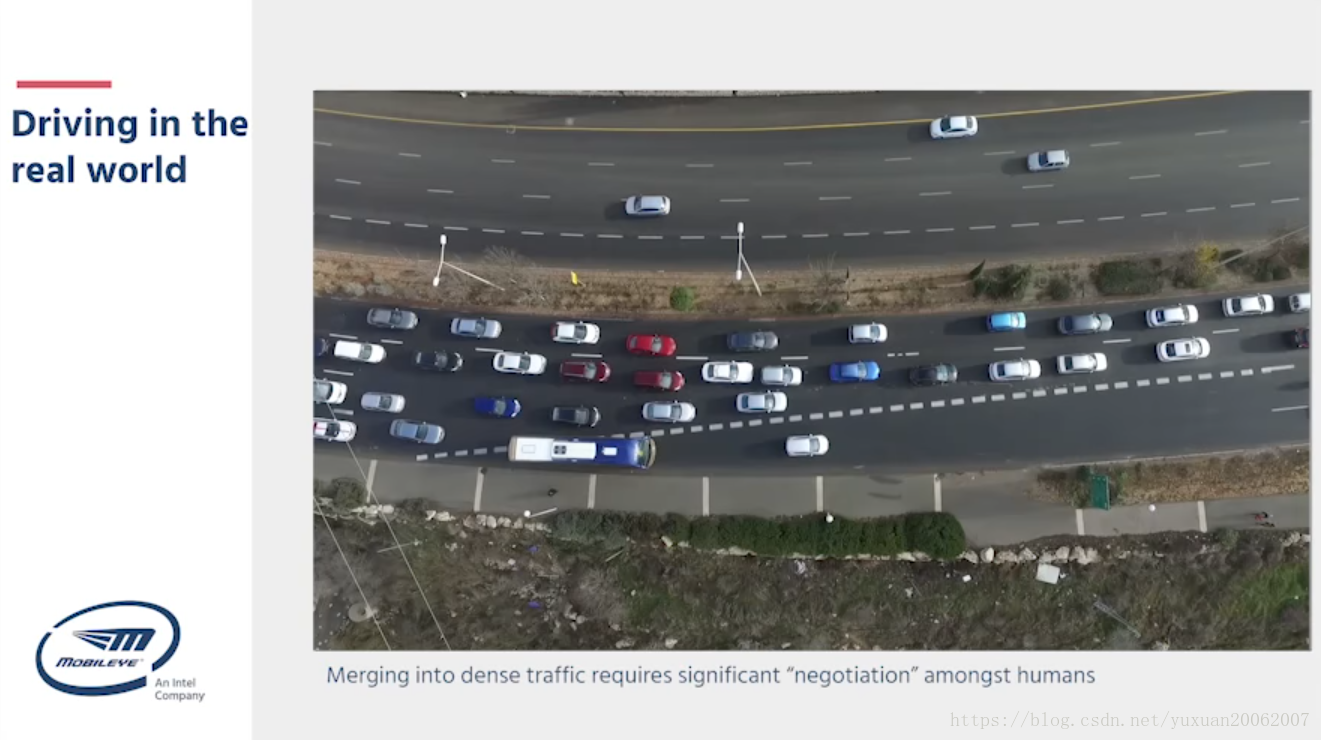
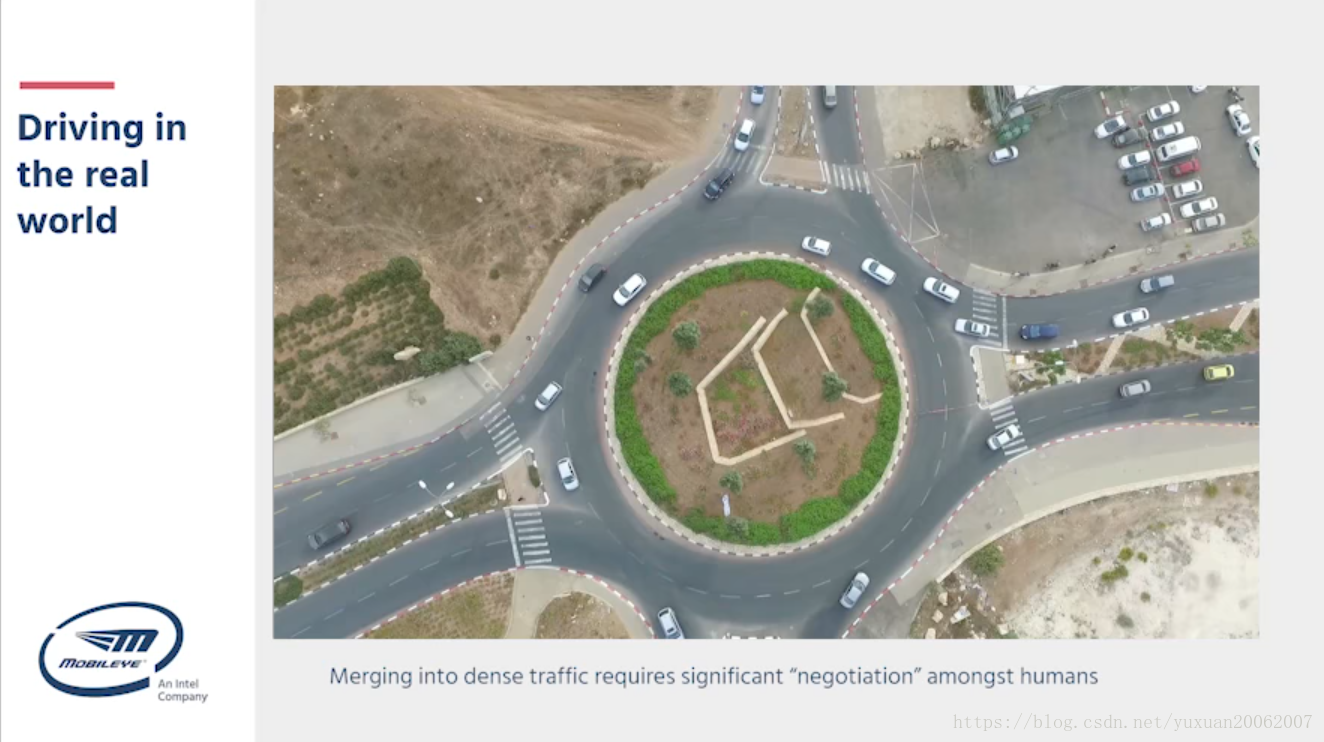
比较有趣的是Mobileye的技术方案,没有做物体预测!道理其实也很简单,因为准确预测物体的运动本身就很困难,规划本身就是个比较复杂的模块,为了做规划另外做一个和规划一样复杂的模块,貌似确实有点多余。
Mobileye用了机器学习的方法,定义了 语义状态空间,比如刹车,左右转向,加速等等,用了蒙特卡洛树搜索的方法配合加强学习进行训练。这个方法的算力要求只有感知的1%。
本文资料来自于Shashua教授的演讲。
比较有趣的是Mobileye的技术方案,没有做物体预测!道理其实也很简单,因为准确预测物体的运动本身就很困难,规划本身就是个比较复杂的模块,为了做规划另外做一个和规划一样复杂的模块,貌似确实有点多余。
Mobileye用了机器学习的方法,定义了 语义状态空间,比如刹车,左右转向,加速等等,用了蒙特卡洛树搜索的方法配合加强学习进行训练。这个方法的算力要求只有感知的1%。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























