







CH3 动态规划(Planning by Dynamic Programming)
文章目录
3.1 简介
动态规划:将复杂问题分解成小问题进行求解。
动态:求解问题的序列;
规划:优化程序,比如策略。
常用于解决包含以下性质的问题:
- 最优子结构:子问题的解可构成总解的一部分
- 子问题有大量重复
- 马尔科夫决策过程:存在递归分解过程,值函数会反复存储与重用
在MDP问题上运用动态规划方法:
假定DP已知MDP所有环境信息:
- 预测:
Input:MDP < S , A , P , R , γ > <S,A,P,R,\gamma> <S,A,P,R,γ>和策略 π \pi π
or MRP < S , P π , R π , γ > <S,P^{\pi},R^{\pi},\gamma> <S,Pπ,Rπ,γ>
Output:值函数 v π v_{\pi} vπ
-
控制:
Input:MDP < S , A , P , R , γ > <S,A,P,R,\gamma> <S,A,P,R,γ>
Output:值函数 v π v_{\pi} vπ和最优策略 π ∗ \pi^* π∗
3.2 策略评估(Policy Evaluation)
3.2.1 问题与方法
得出好策略,看看所定策略是怎么样的
问题:评估给定的策略 π \pi π
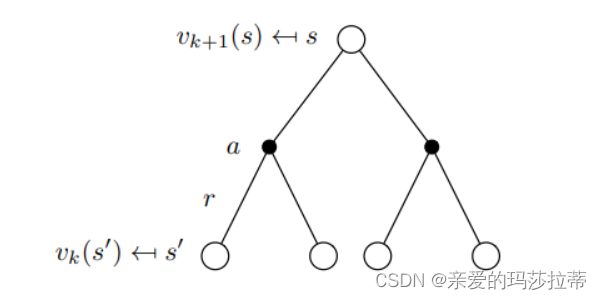
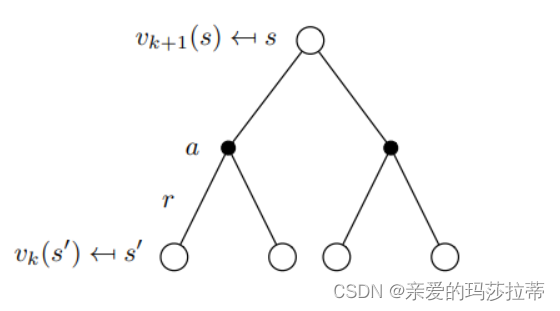
方法:贝尔曼方程的迭代使用,使用同步的方法(使用 v k ( s ′ ) v_{k}(s') vk(s′)更新 v k + 1 ( s ) v_{k+1}(s) vk+1(s))
贝尔曼方程:
v
k
+
1
=
R
π
+
γ
P
π
v
k
v
k
+
1
(
s
)
=
∑
a
∈
A
π
(
a
∣
s
)
(
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
k
(
s
′
)
)
\boldsymbol{v}^{k+1}=\boldsymbol{R^{\pi}}+\gamma\boldsymbol{P^{\pi}v}^k\\ v_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s'))
vk+1=Rπ+γPπvkvk+1(s)=a∈A∑π(a∣s)(Rsa+γs′∈S∑Pss′avk(s′))
下一状态值函数=当前策略的所有动作 (即时奖励+折扣因子*动作后会转移到的状态 *新状态的期望价值)
3.2.2 例题
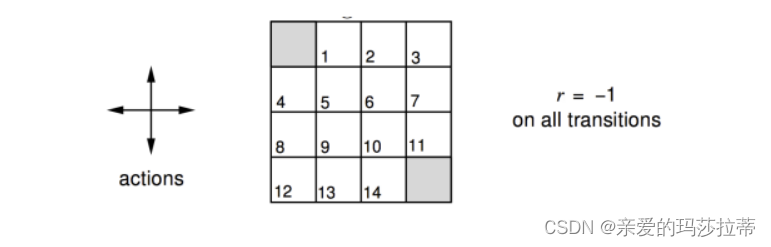
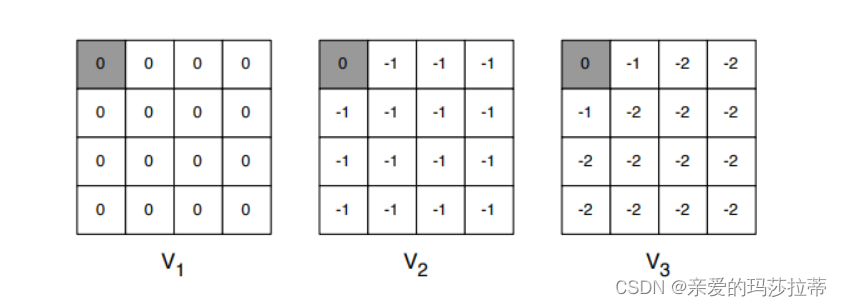
在给定四方格中,左上与右下为终止状态,个体以1/4的概率向上下左右移动,越过边框则反弹,所有状态的及时奖励均为-1,折扣因子为1,求取各步骤k的值函数
求解:
**无贪婪处理:**无论经过多少步,用户的策略都是以1/4的概率向上下左右。
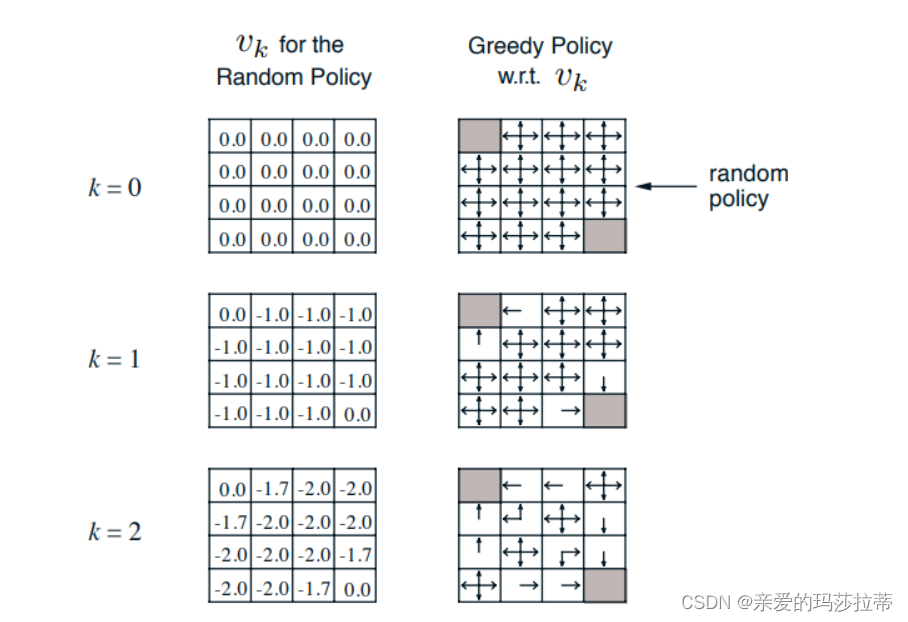
计算 从k=1到k=2的(1,2) 位置的值函数:
v
k
+
1
(
s
)
=
∑
a
∈
A
π
(
a
∣
s
)
(
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
k
(
s
′
)
)
=
上(回到原地)
+
下(到(
2
,
2
))
+
左(终止)
+
右(到(
1
,
3
))
=
1
/
4
∗
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
+
1
/
4
∗
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
+
1
/
4
∗
(
−
1
+
1
∗
(
1
∗
(
0
)
)
)
+
1
/
4
∗
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
=
−
1.75
v_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s'))\\ =上(回到原地)+下(到(2,2))+左(终止)+右(到(1,3))\\ =1/4*(-1+1*(1*(-1.0)))+1/4*(-1+1*(1*(-1.0)))+1/4*(-1+1*(1*(0)))+1/4*(-1+1*(1*(-1.0)))\\ =-1.75
vk+1(s)=a∈A∑π(a∣s)(Rsa+γs′∈S∑Pss′avk(s′))=上(回到原地)+下(到(2,2))+左(终止)+右(到(1,3))=1/4∗(−1+1∗(1∗(−1.0)))+1/4∗(−1+1∗(1∗(−1.0)))+1/4∗(−1+1∗(1∗(0)))+1/4∗(−1+1∗(1∗(−1.0)))=−1.75
注:这里经过一个动作到达的状态的固定的,如个体向上会以概率1回到原地。
这里没有贪婪处理,无论经过多少步,用户的策略都是以1/4的概率向上下左右。
最终仅评价每个位置的值函数。
3.3 策略迭代(Policy Iteration)
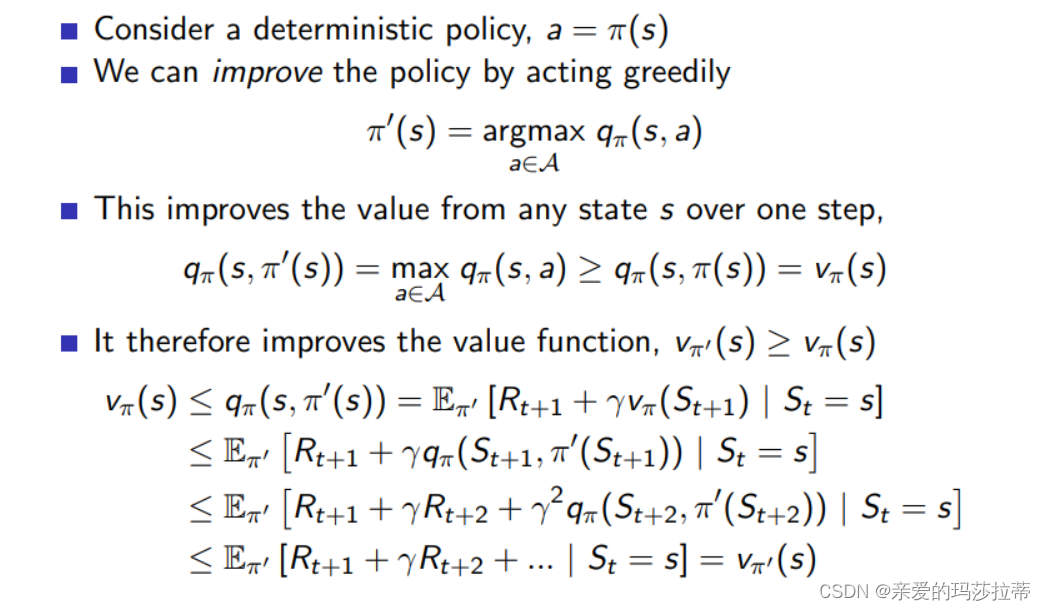
3.3.1 贪婪处理
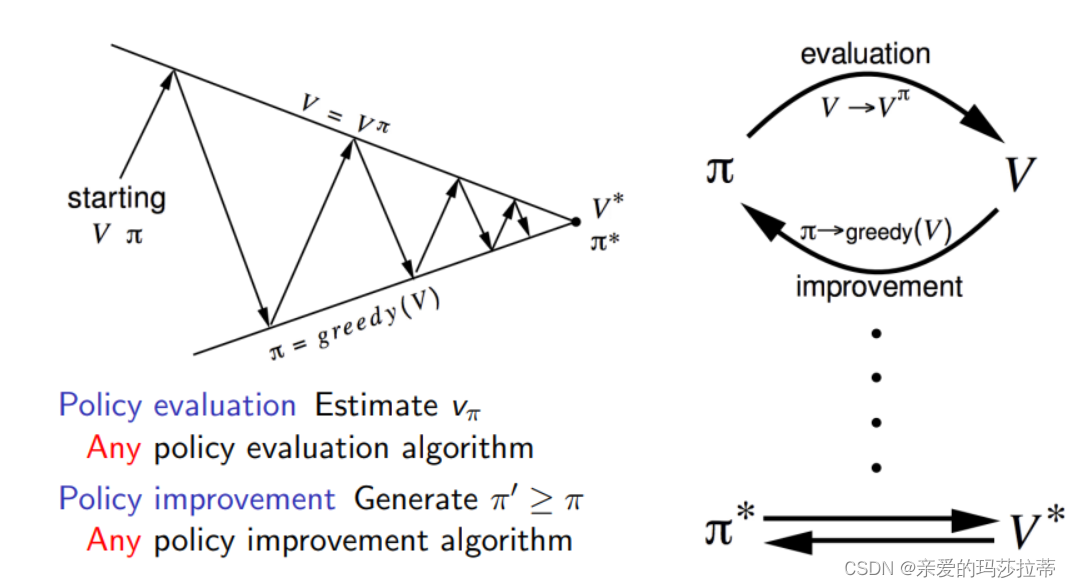
在得到值函数的过程中,一步步优化策略
π ′ = g r e e d y ( v π ) \pi'=greedy(v_{\pi}) π′=greedy(vπ) 贪心地选择最优策略,加快收敛速率
计算**从k=1到k=2的(1,2)**位置的值函数:
经过k=0->k=1的贪心策略优化后,(1,2)位置的策略为向左
v
k
+
1
(
s
)
=
∑
a
∈
A
π
(
a
∣
s
)
(
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
k
(
s
′
)
)
=
左(终止)
=
1
∗
(
−
1
+
1
∗
(
1
∗
(
0
)
)
)
=
−
1
v_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s'))\\ =左(终止)\\ =1*(-1+1*(1*(0)))\\ =-1
vk+1(s)=a∈A∑π(a∣s)(Rsa+γs′∈S∑Pss′avk(s′))=左(终止)=1∗(−1+1∗(1∗(0)))=−1
此操作满足压缩映像原理,最终值函数均会收敛到最优 π ∗ \pi^* π∗
证明:
每一步都是最优策略,最后一定也是最优策略。
注:
-
策略评估不一定要收敛完成
-
早停机制:固定迭代次数或者值函数差小于收敛阈值即结束
-
策略迭代等价于值迭代
3.4 值迭代(Value Iteration)
优化策略可分为两部分:优化的动作和下一状态
最优化理论:
一个策略 π ( a ∣ s ) \pi(a|s) π(a∣s)自状态s到达最优值函数 v π ( s ) = v ∗ ( s ) v_{\pi}(s)=v_{*}(s) vπ(s)=v∗(s),当且仅当
- 从s可到达任何状态s’
- π \pi π已经是从s’出发的最优策略了 v π ( s ’ ) = v ∗ ( s ′ ) v_{\pi}(s’)=v_{*}(s') vπ(s’)=v∗(s′)
3.4.1 问题与方法
问题:寻找策略 π \pi π
方法:贝尔曼方程的迭代使用,使用同步的方法(使用 v k ( s ′ ) v_{k}(s') vk(s′)更新 v k + 1 ( s ) v_{k+1}(s) vk+1(s))
没有显性的策略;中间值函数可能不与任何策略对应
贝尔曼方程:
v
k
+
1
=
m
a
x
a
∈
A
(
R
π
+
γ
P
π
v
k
)
v
k
+
1
(
s
)
=
m
a
x
a
∈
A
(
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
k
(
s
′
)
)
\boldsymbol{v}^{k+1}=max_{a\in A}(\boldsymbol{R^{\pi}}+\gamma\boldsymbol{P^{\pi}v}^k)\\ v_{k+1}(s)=max_{a\in A}(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s'))
vk+1=maxa∈A(Rπ+γPπvk)vk+1(s)=maxa∈A(Rsa+γs′∈S∑Pss′avk(s′))
下一状态值函数=当前策略的拥有最大值函数的动作 (即时奖励+折扣因子*动作后会转移到的状态 *新状态的期望价值)
3.4.2 值迭代例题
完全不考虑策略,直接以最优的v(s)更新,试探各个方向,贪心选择值函数最大的方向
v
∗
(
s
)
<
−
m
a
x
a
∈
A
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
∗
(
s
′
)
v_{*}(s)<-max_{a \in A}R^a_s+\gamma \sum_{s' \in S}P_{ss'}^av_{*}(s')
v∗(s)<−maxa∈ARsa+γs′∈S∑Pss′av∗(s′)
计算**从k=2到k=3的(1,2)**位置的值函数:
v
∗
(
s
)
<
−
m
a
x
a
∈
A
R
s
a
+
γ
∑
s
′
∈
S
P
s
s
′
a
v
∗
(
s
′
)
v
∗
(
s
)
<
−
m
a
x
(
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
,
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
,
(
−
1
+
1
∗
(
1
∗
(
0
)
)
)
,
(
−
1
+
1
∗
(
1
∗
(
−
1.0
)
)
)
)
v
∗
(
s
)
<
−
(
−
1
)
v_{*}(s)<-max_{a \in A}R^a_s+\gamma \sum_{s' \in S}P_{ss'}^av_{*}(s')\\ v_{*}(s)<-max( (-1+1*(1*(-1.0))),(-1+1*(1*(-1.0))),(-1+1*(1*(0))),(-1+1*(1*(-1.0))))\\ v_{*}(s)<-(-1)
v∗(s)<−maxa∈ARsa+γs′∈S∑Pss′av∗(s′)v∗(s)<−max((−1+1∗(1∗(−1.0))),(−1+1∗(1∗(−1.0))),(−1+1∗(1∗(0))),(−1+1∗(1∗(−1.0))))v∗(s)<−(−1)
3.5 对比分析
| 策略评估 | 策略迭代 | 值迭代 | |
|---|---|---|---|
| 应用于 | 评估已知的策略(预测) | 选择最优的策略(控制) | 选择最优的策略(控制) |
| 方法 | 贝尔曼方程的迭代使用,使用同步的方法(使用 v k ( s ′ ) v_{k}(s') vk(s′)更新 v k + 1 ( s ) v_{k+1}(s) vk+1(s)) | 在得到值函数的过程中,贪心地选择最优策略,加快收敛速率 | 完全不考虑策略,直接以最优的v(s)更新,试探各个方向,贪心选择值函数最大的方向 |
| 公式 | v k + 1 ( s ) = ∑ a ∈ A π ( a ∣ s ) ( R s a + γ ∑ s ′ ∈ S P s s ′ a v k ( s ′ ) ) v_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s')) vk+1(s)=∑a∈Aπ(a∣s)(Rsa+γ∑s′∈SPss′avk(s′)) | v k + 1 ( s ) = ∑ a ∈ A π ( a ∣ s ) ( R s a + γ ∑ s ′ ∈ S P s s ′ a v k ( s ′ ) ) v_{k+1}(s)=\sum_{a\in A}\pi(a|s)(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s')) vk+1(s)=∑a∈Aπ(a∣s)(Rsa+γ∑s′∈SPss′avk(s′)) | v k + 1 ( s ) = m a x a ∈ A ( R s a + γ ∑ s ′ ∈ S P s s ′ a v k ( s ′ ) ) v_{k+1}(s)=max_{a\in A}(R_s^a+\gamma \sum_{s'\in S}P_{ss'}^av_k(s')) vk+1(s)=maxa∈A(Rsa+γ∑s′∈SPss′avk(s′)) |
| 特点 | 全过程策略保持不变,不停计算值函数 | 计算值函数与策略优化选择交替进行 | 无策略,直接选择动作的最优值函数复杂度 |
| 复杂度 | O ( m n 2 ) O(mn^2) O(mn2) m:动作数 n:状态数 | 同左 | O ( m n 2 ) O(mn^2) O(mn2) m:动作数 n:状态数 |
3.6 异步DP
所有状态可并行更新,值函数表中新旧交替且并存














 889
889











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









