



首先进行STBY的代码编写,需要实现的功能:待机/休眠。
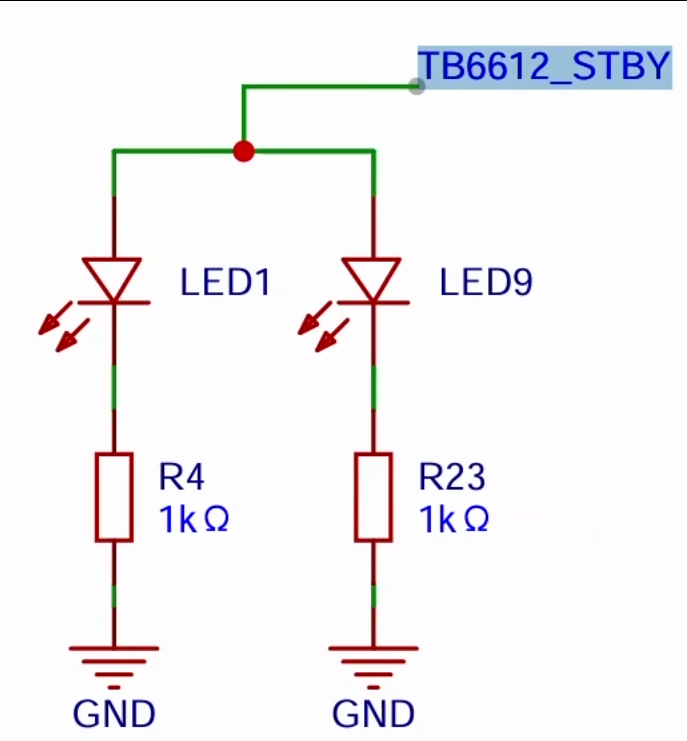
同时,这个STBY还控制两颗LED。这个STBY用的是按钮,涉及到按钮需要用到button.c和button.h,同时用到裸机多任务模型。
逻辑多任务模型: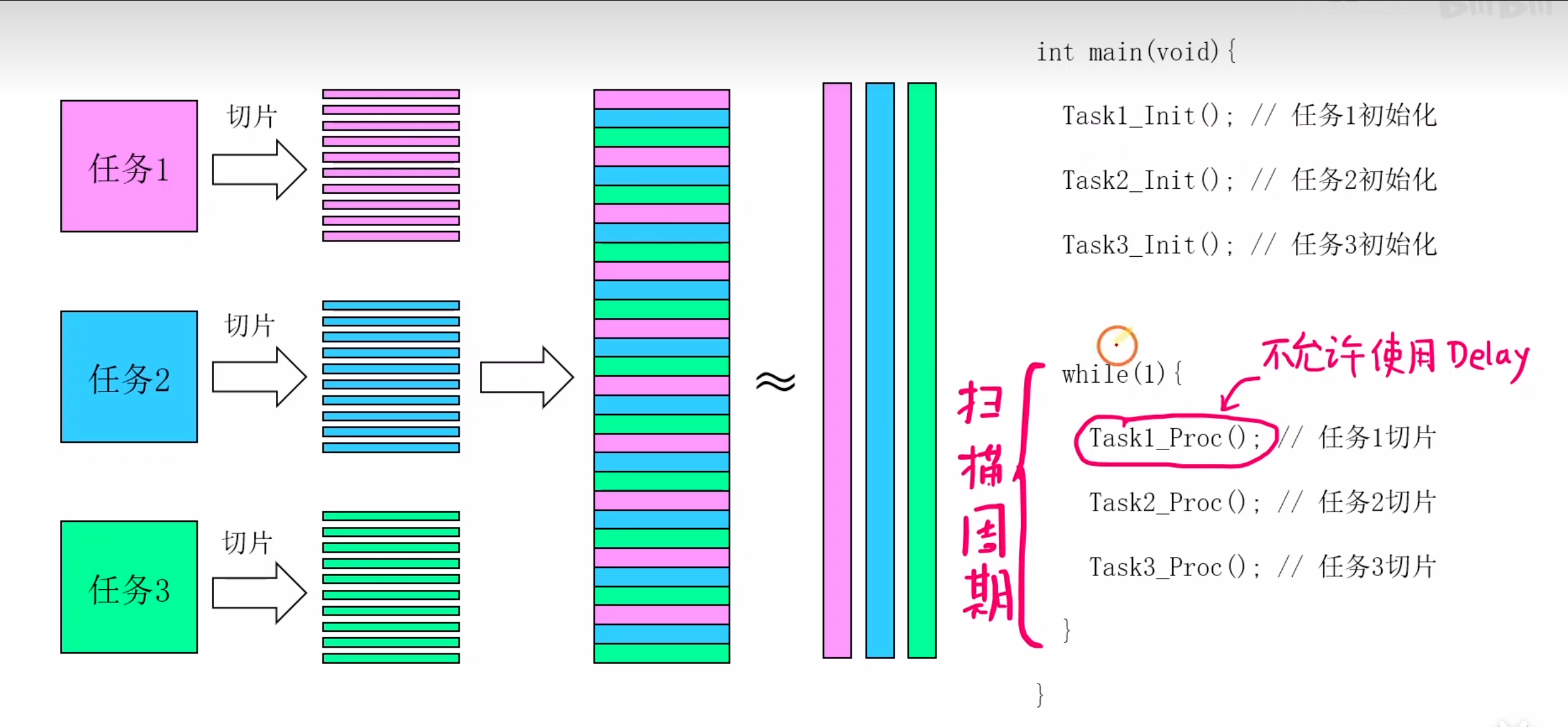
按钮代码和连线位置如下:

#include "app_button.h"
#include "button.h"
#include "app_pwm.h"
static Button_TypeDef userKey; //用户按钮
static void OnUserKey_Clicked(uint8_t clicks);
//
//简介:按钮初始化
//
void App_Button_Init(void)
{
Button_InitTypeDef Button_InitStructure = {0};
Button_InitStructure.GPIOx = GPIOA;
Button_InitStructure.GPIO_Pin = GPIO_Pin_11;
My_Button_Init(&userKey,&Button_InitStructure);
My_Button_SetClickCb(&userKey,OnUserKey_Clicked);
}
void App_Button_Proc(void)
{
My_Button_Proc(&userKey);
}
//
//简介:0-电机休眠 1-电机工作
//
static uint8_t pwm_on = 0;
//
//简介:按钮点击的回调函数
//
static void OnUserKey_Clicked(uint8_t clicks)
{
if(clicks == 1)
{
//翻转状态
if(pwm_on == 0)
{
pwm_on = 1;
}
else
{
pwm_on = 0;
}
App_PWM_Cmd(pwm_on);
}
}
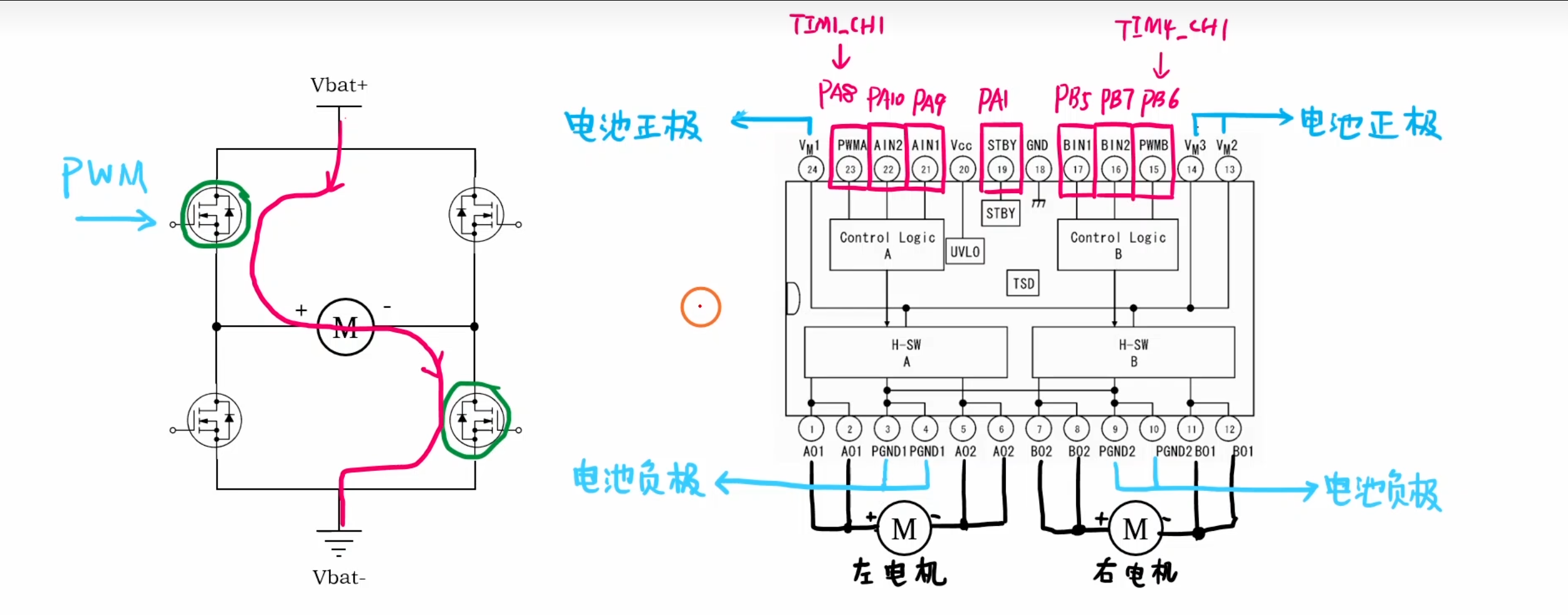
按钮写完之后是写STBY的控制函数
电路图在上面,在这个代码里需要实现的是电机的休眠/工作,同时LED的亮灭。
void STBY_Pin_Init(void)是一个简单的GPIO初始化,对应的口也都在电路图里可以看到,这里的代码写在App_PWM.c里,是对电机的代码。
//
//简介:控制TB6612的状态,会在外部App_Button.c被调用
//
void App_PWM_Cmd(uint8_t on)
{
if(on == 0)
{
GPIO_Wrtite(GPIOA,GPIO_Pin_1,Bit_RESET);
}
else
{
GPIO_Wrtite(GPIOA,GPIO_Pin_1,Bit_SET);
}
}
两颗LED可以看电路图,给STBY写1的时候,它是会自己亮的。

















 1521
1521


 到【灌水乐园】发言
到【灌水乐园】发言








