






焊缝跟踪 abb机器人二次开发
上位机由C#+halcon联合编程
提供源码讲解,abb编程及通讯、工业相机标定、halcon图像处理、C#与halcon联合编程等
YID:92350657545014872
请举左手ii
焊缝跟踪技术解析:ABB机器人二次开发及上位机C#与halcon的联袂之舞
一、开场随笔
在繁花似锦的智能制造领域,焊缝跟踪技术以其高精度、高效率的特点备受瞩目。今天,就让我们一起探讨一下焊缝跟踪中ABB机器人的二次开发,以及上位机使用C#与halcon联合编程的奇妙之旅。
二、场景再现
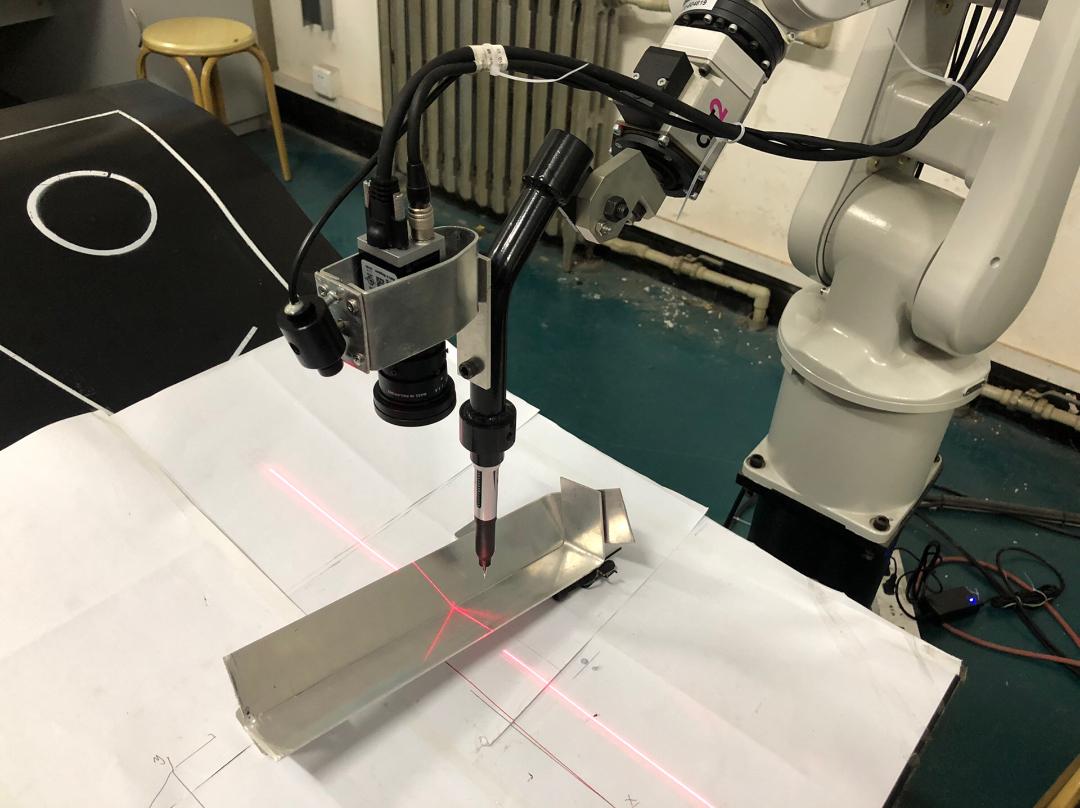
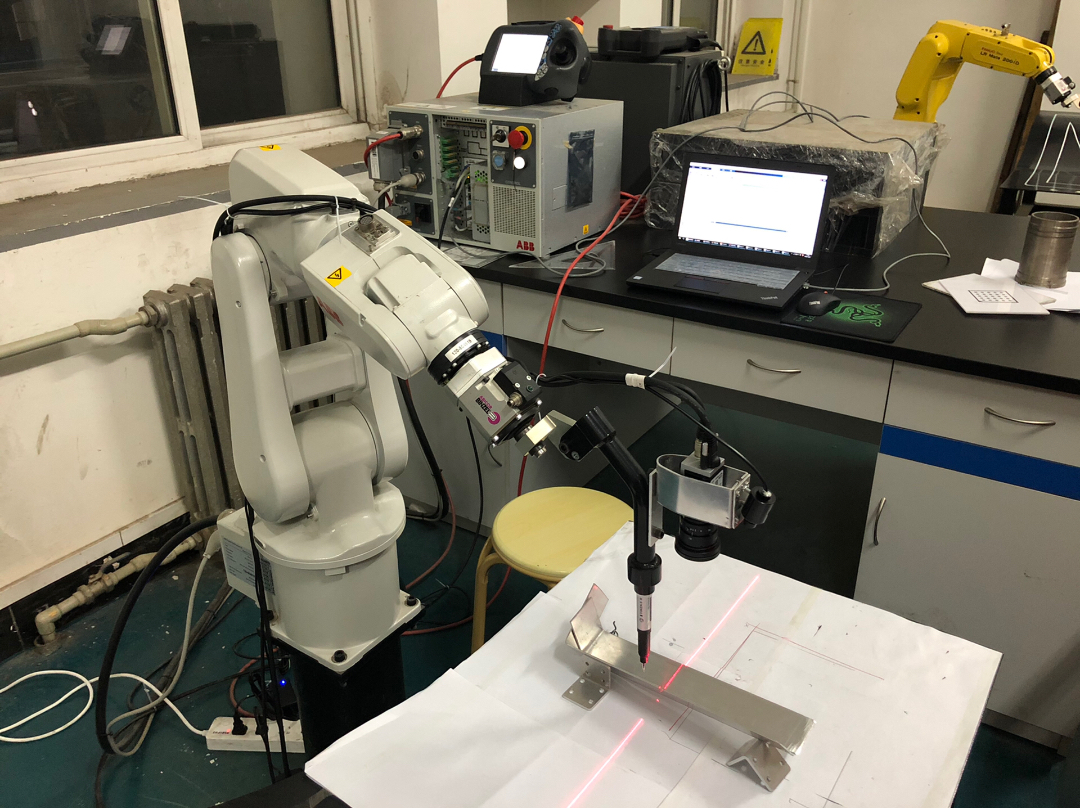
在一个现代化的工业车间里,一条自动化生产线正在紧张而有序地运作。其中,一台ABB机器人正在进行焊缝跟踪的二次开发工作。上位机则通过C#语言结合halcon视觉,实现对机器人工作的精确控制。
三、人物介绍
我们的主角是一位高级程序员,他负责使用C#和halcon进行上位机的联合编程工作。他需要对ABB机器人进行深入的了解,同时还需要掌握C#语言以及halcon图像处理技术。
四、技术剖析
- ABB机器人二次开发
ABB机器人二次开发主要是对机器人的运动控制、传感器数据采集、焊缝跟踪算法等进行开发和优化。通过编程,我们可以让机器人更加智能地完成焊缝跟踪任务。
- 上位机C#与halcon联合编程
上位机使用C#语言进行编程,通过与halcon视觉的结合,实现对机器人工作的精确控制。C#语言具有丰富的类库和强大的开发能力,而halcon则提供了强大的图像处理功能。两者相结合,可以实现对机器人工作的实时监控和精确控制。
五、源码讲解
下面是一段C#与halcon联合编程的源码示例:
// 读取工业相机传回的图像数据
Image image = HalconAPI.GetImage();
// 进行图像处理,如灰度化、二值化等操作
HalconAPI.Grayscale(image, out grayImage);
HalconAPI.Threshold(grayImage, out binaryImage);
// 检测焊缝位置
Point[] weldSeamPositions = HalconDetectWeldSeam(binaryImage);
// 将焊缝位置信息发送给ABB机器人进行跟踪焊接
SendWeldSeamInfoToAbbRobot(weldSeamPositions);
六、工业相机标定与halcon图像处理
工业相机标定是焊缝跟踪技术中的重要环节。通过标定,我们可以获取相机的内参和外参,从而实现对焊缝位置的精确测量。而halcon图像处理技术则可以帮助我们从相机传回的图像中提取出有用的信息,如焊缝的位置、形状等。
七、结尾随笔
通过ABB机器人的二次开发和上位机C#与halcon的联合编程,我们可以实现焊缝跟踪的高精度、高效率作业。未来,随着人工智能和物联网技术的发展,焊缝跟踪技术将会在更多领域得到应用,为智能制造的发展贡献力量。
资料详尽,请点查看: 焊缝跟踪 abb机器人二次开发 上位机由C#+halcon联合编程 提供源码讲解,abb编程及通讯、工业相机标定、halcon图像处理、C#与halcon联合编程
















 285
285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









