






关键词:高阶系统;一致性算法;滑模面;固定时间;观测器;s函数;高阶一致性;
主题:解决了受匹配外部干扰影响的高阶积分器多智能体系统的固定时间领导者-跟随者一致性问题。
开发了一种新的基于固定时间分布式观测器的级联控制结构,实现了固定时间一致性跟踪控制。
Matlab/simulink/s函数
ID:97160669184664568
言午三木
在解决高阶系统中受匹配外部干扰影响的问题上,固定时间领导者-跟随者一致性问题一直是一个具有挑战性的难题。为了解决这个问题,本文提出了一种基于固定时间分布式观测器的级联控制结构,通过该结构实现了固定时间一致性跟踪控制。
在高阶系统中,由于外部干扰的存在,多智能体系统的一致性问题变得更为复杂。在传统的领导者-跟随者一致性算法中,由于匹配外部干扰的影响,跟随者无法准确地跟随领导者的状态,导致系统的一致性目标无法实现。因此,本文提出了一种新的方法来解决这个问题。
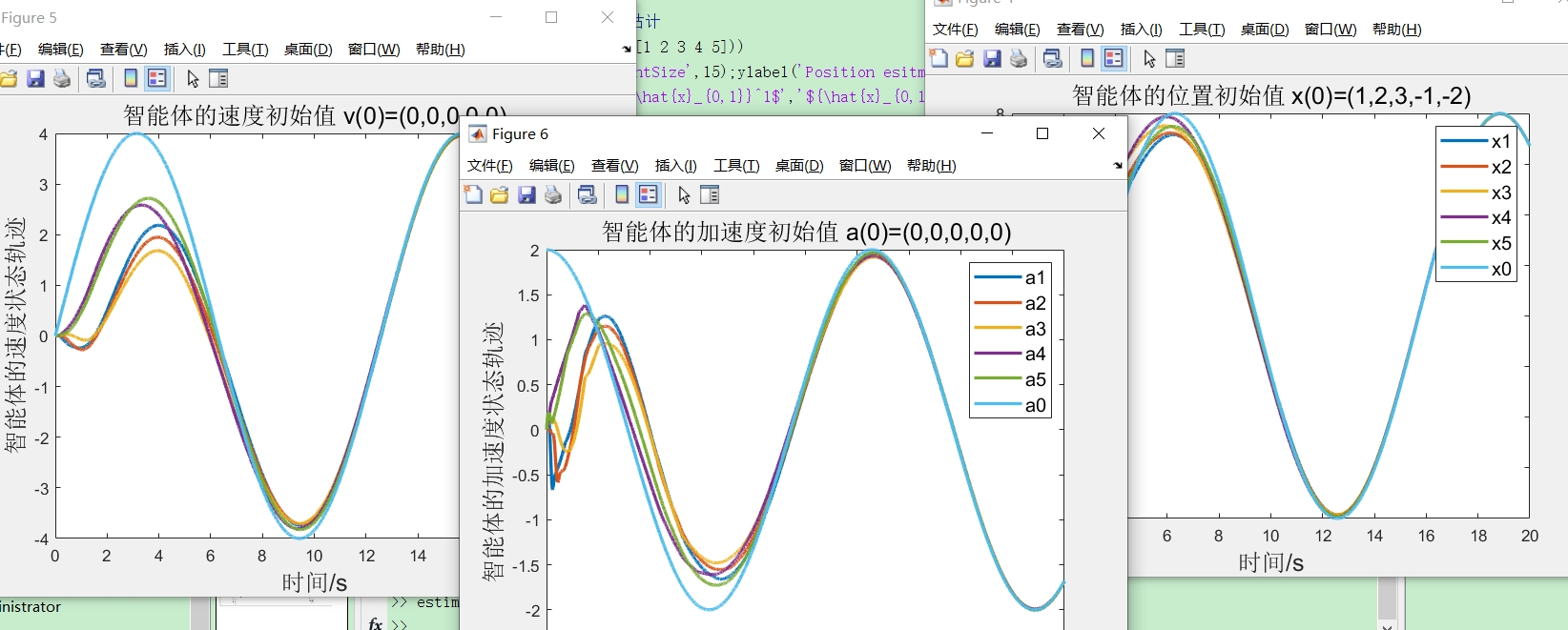
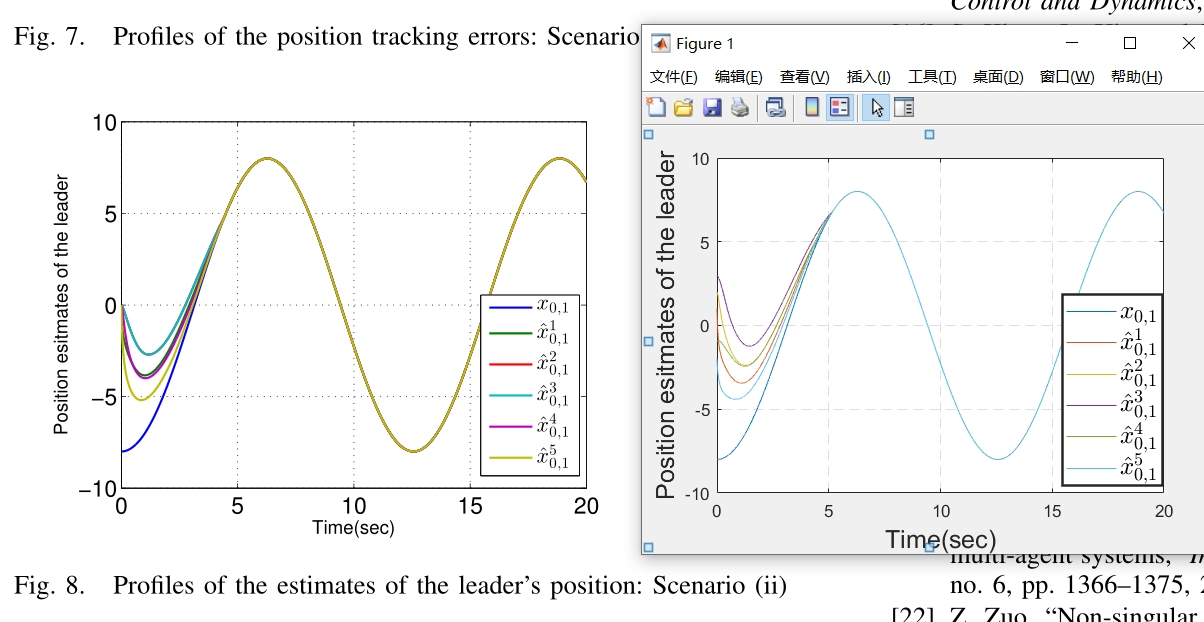
首先,我们引入了滑模面的概念,通过建立滑模面来实现领导者-跟随者之间的一致性。滑模面可以将系统状态引导到一致的目标轨迹上,从而实现系统的一致性控制。为了消除匹配外部干扰的影响,我们引入了固定时间分布式观测器。观测器能够实时估计系统的状态,并根据观测结果进行相应的控制调整,从而实现系统状态的一致性跟踪。
在设计中,我们使用了Matlab Simulink中的s函数来建立系统的数学模型,并进行仿真验证。通过对不同阶数的系统进行仿真实验,我们证明了该方法在解决高阶系统中的一致性问题上的有效性与可行性。实验结果表明,该方法不仅可以实现固定时间的一致性跟踪控制,而且对于受匹配外部干扰影响的系统也具有很好的稳定性和鲁棒性。
综上所述,本文提出了一种基于固定时间分布式观测器的级联控制结构,通过滑模面和观测器的引入,实现了高阶系统中受匹配外部干扰影响的固定时间领导者-跟随者一致性问题的解决。该方法在实际应用中具有重要意义,对于提高高阶系统的稳定性和控制性能具有积极作用。
关键词: 高阶系统,一致性算法,滑模面,固定时间,观测器,s函数,高阶一致性
相关的代码,程序地址如下:http://nodep.cn/669184664568.html
















 215
215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









