






aim:
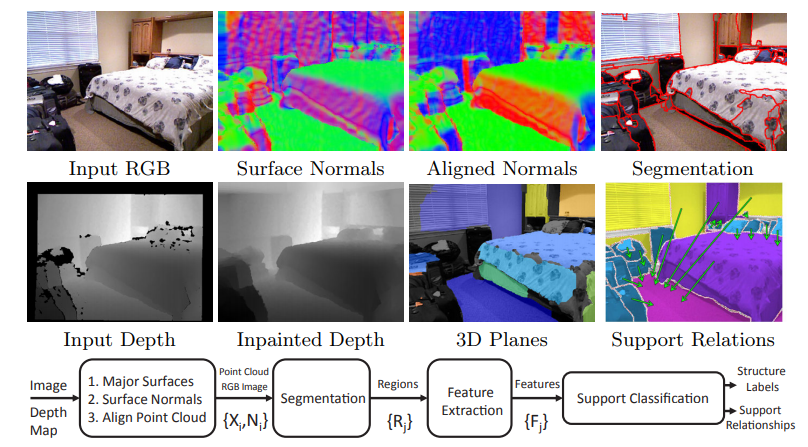
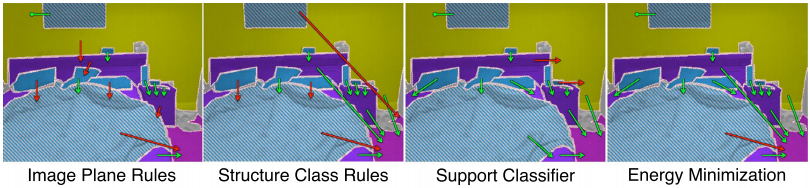
In this paper, our goal is to provide such a physical scene parse: to segment visible regions into surfaces and objects and to infer their support relations. In particular, we are interested in indoor scenes that reflect typical living conditions.
difficulties:
prevalence of small objects, and heavy occlusion, which are all compounded by the mess and disorder that are common in lived-in rooms.
advantages:
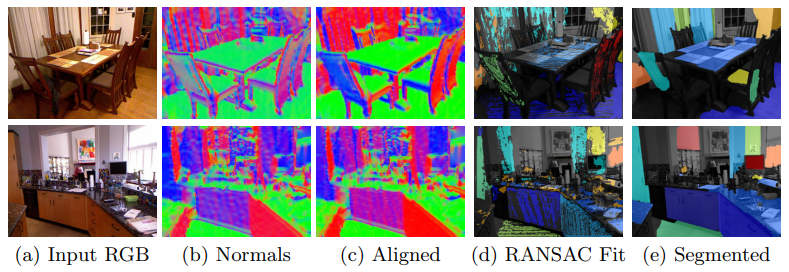
large planar surfaces, such as floor, walls, and table tops, and objects can often be interpreted in relation to those surfaces. estimating the floor orientation or finding large planar surfaces are much easier with depth information.

key technology:















 979
979

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









