







一、使用版本:
Ubuntu 20.04.6LTS ;
ROS参数:
* /rosdistro: noetic
* /rosversion: 1.16.0
Qt5.14.2+qtcreator4.11.1
二、安装
Qt 配置 ROS 开发环境_qt ros环境_YMGogre的博客-CSDN博客
ROS和Qt配置可参考如上链接。
Ubuntu20.04和ROS安装直接在csdn或百度搜索有很多。
三、qt集成环境使用
参考博客:
https://blog.csdn.net/Bing_Lee/article/details/115289779
主目录下创建workspace_qtros文件夹用于保存工作空间;
在该文件夹下创建工作空间
cd workspace_qtrosmkdir -p catkin_qt/src初始化工作空间
cd workspace_qtros/catkin_qt/src
catkin_init_workspace

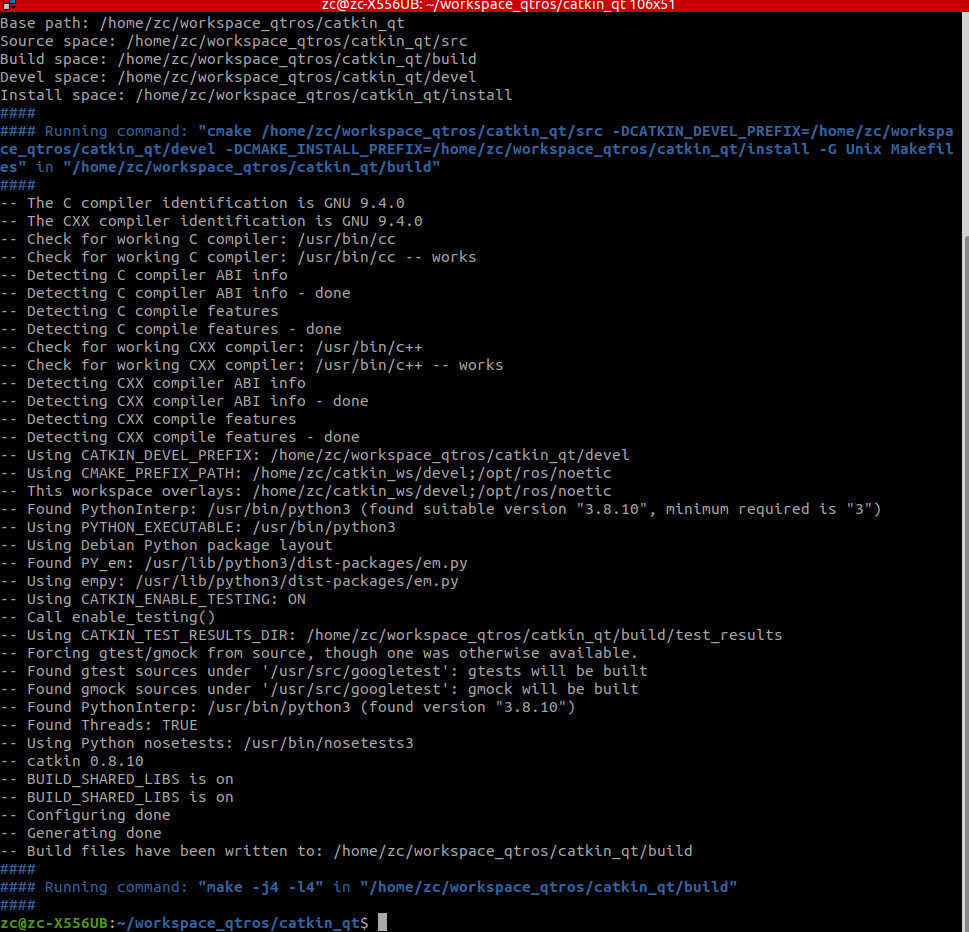
编译整个工作空间
cd workspace_qtros/catkin_qt
catkin_make
编译结果如下
运行环境变量设置脚本,增加环境变量
cd workspace_qtros/catkin_qt/devel/
source setup.bash
检查环境变量是否添加成功

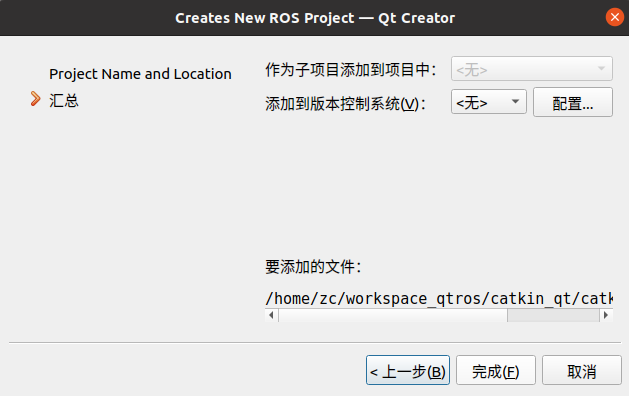
新建项目ROS Workspace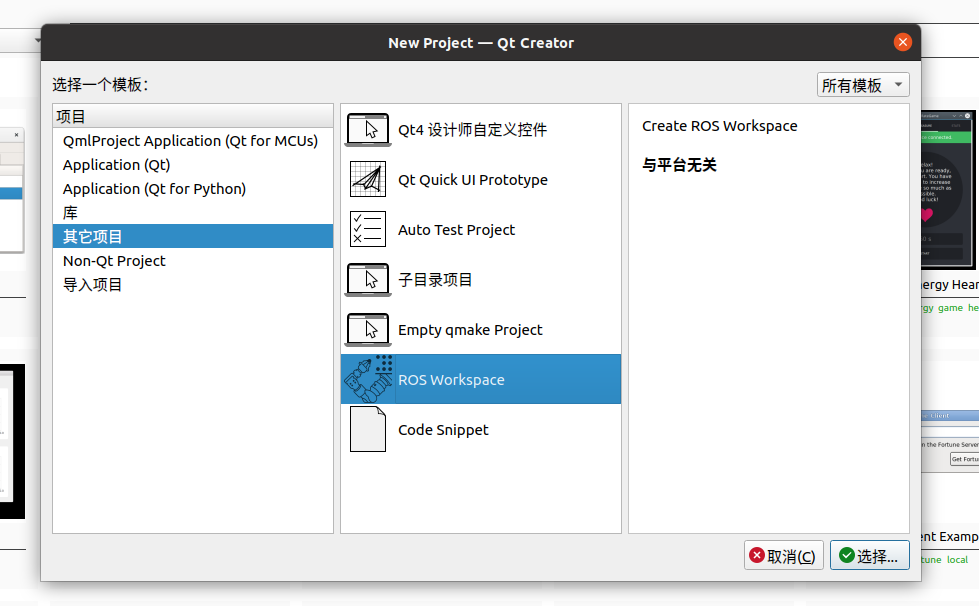
选择->
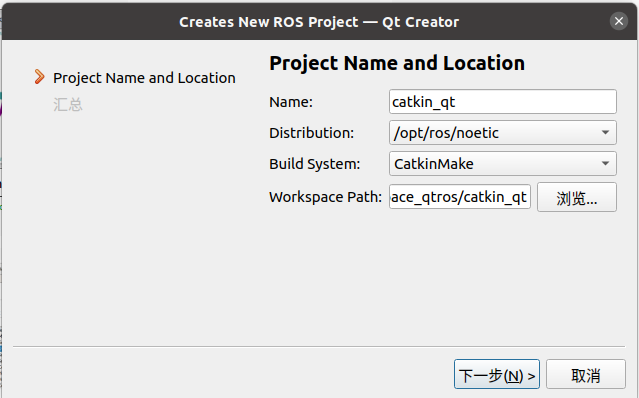
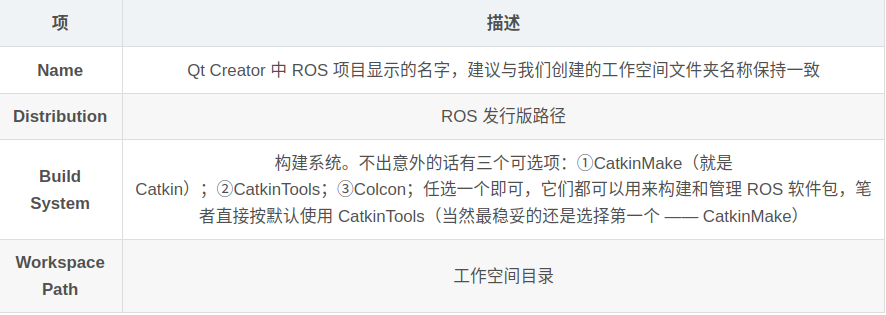
下一步->
ROS 工程创建完成后,我们右击项目名称,点击 “添加新文件”:
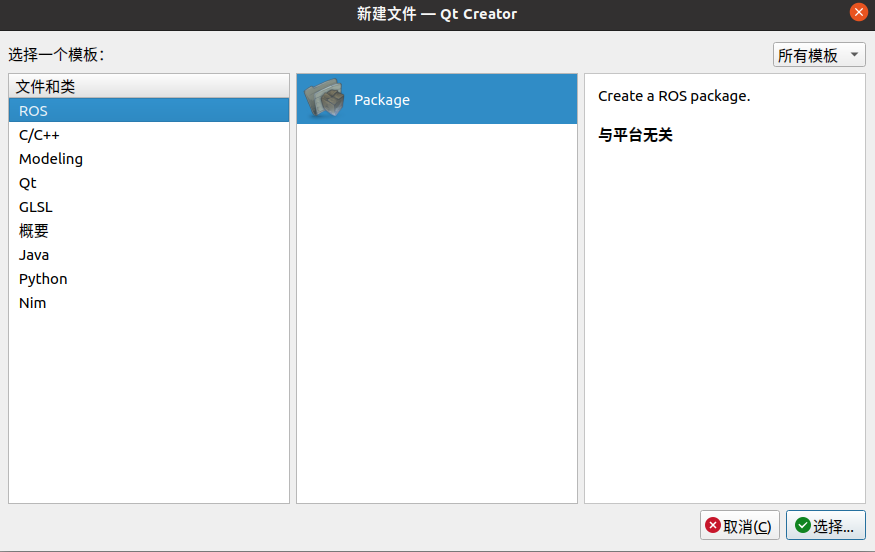
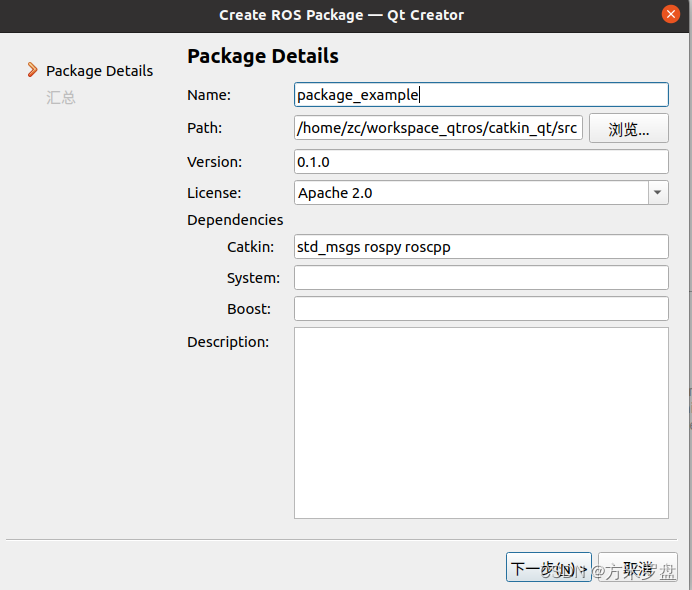
填写完成后,点击 “下一步(N)”==>“完成(F)” 即可成功向 ROS 工程添加一个新建的 ROS 软件包。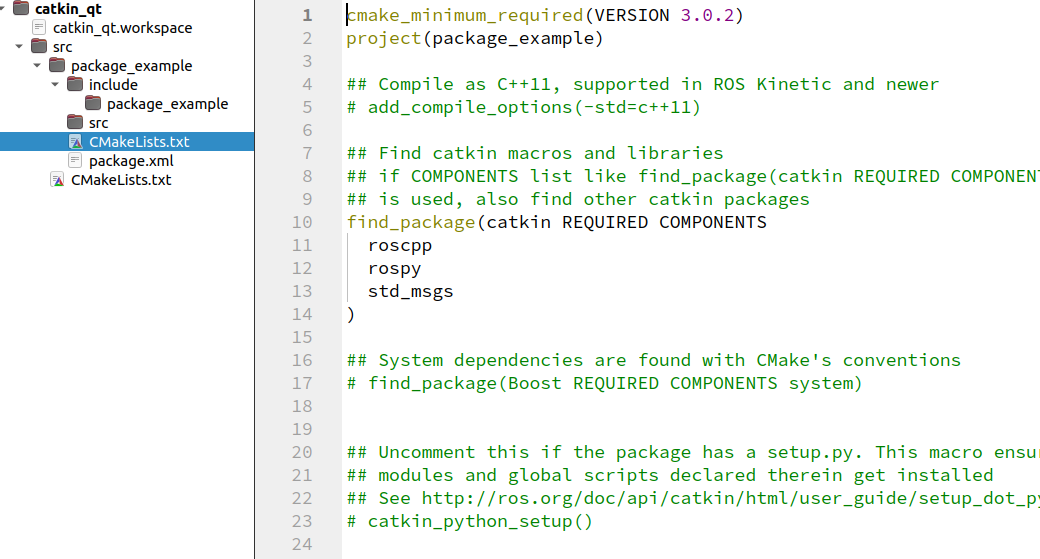















 7469
7469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









