






基于NMPC(非线性模型预测控制算法)轨迹跟踪与避障控制算法研究
仅供学习算法使用
YID:8770627173879012
xhusj
基于NMPC(非线性模型预测控制算法)轨迹跟踪与避障控制算法研究
无人车技术在近年来得到了快速的发展和广泛的应用。其中,路径跟踪和避障是无人车自动驾驶的两个重要问题。为了实现高效、安全的路径跟踪和避障,研究者们提出了许多算法和方法。本文将介绍一种基于非线性模型预测控制(NMPC)算法的路径跟踪和避障控制算法,并对其进行详细的分析。
首先,我们来详细分析一下代码的结构。代码的前几行是一些初始化设置,包括清除变量、关闭警告、添加路径等。这些设置对于保证程序的正常运行非常重要。接下来,代码定义了一些模拟参数,如模拟时间、预测步数、时间步长等。这些参数在路径跟踪和避障控制中起着重要的作用。
接下来,代码定义了一个地图的结构体Map,其中包含了一系列的点坐标,用于描述路径。然后调用了waypoint函数对地图进行处理。在路径跟踪和避障控制中,地图的准确性和完整性对于保证无人车的安全驾驶至关重要。
然后,代码对一些状态参数进行了初始化,并定义了一些权重矩阵W和WN,用于优化控制问题。权重矩阵的选择对于控制效果和计算效率有着直接的影响。合理选择权重矩阵可以使得无人车的路径跟踪和避障控制更加平稳和高效。
接下来,代码进入主循环,直到模拟时间达到设定的时间长度。在每次循环中,代码首先更新当前位置,并判断是否到达目标点。然后计算参考轨迹和障碍物代价,并解决非线性模型预测控制(NMPC)最优控制问题。在NMPC求解过程中,代码使用了一个while循环来迭代求解,直到满足收敛条件或达到最大迭代次数。在每次迭代中,代码计算控制输入,并更新状态。NMPC算法作为一种优化控制方法,具有较强的适应性和鲁棒性,能够有效地解决路径跟踪和避障控制问题。
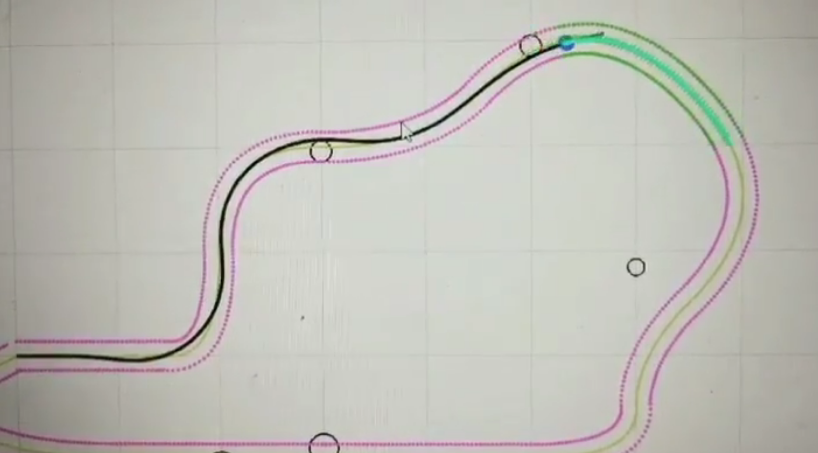
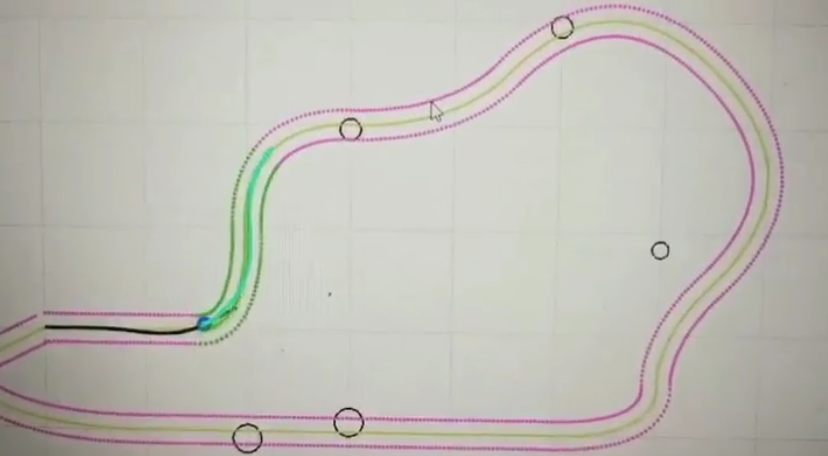
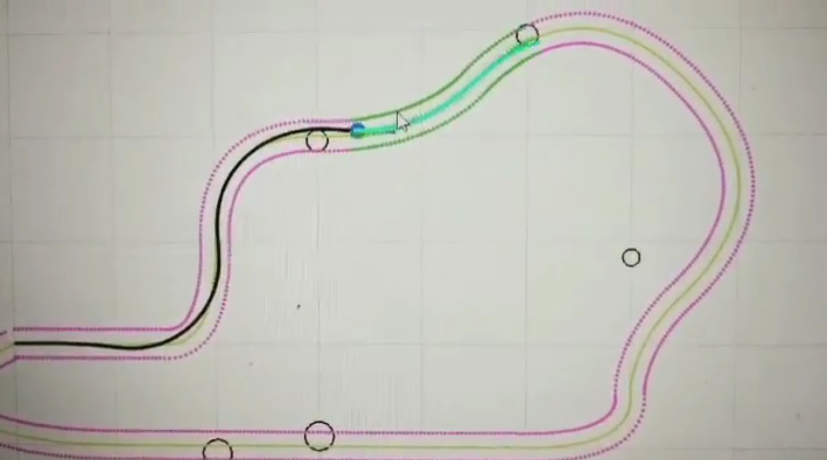
最后,代码进行可视化展示,包括绘制地图、轨迹、参考轨迹等。可视化展示是对路径跟踪和避障控制结果的直观呈现,有助于研究者们对算法的效果进行评估和改进。
综上所述,本文介绍了一种基于非线性模型预测控制(NMPC)算法的路径跟踪和避障控制算法。该算法能够实现无人车的自动驾驶功能,并具有较强的适应性和鲁棒性。通过详细分析代码的结构和算法的原理,我们对路径跟踪和避障控制问题有了更深入的了解。希望本文能对相关领域的研究者们有所启发和帮助。
【相关代码,程序地址】:http://lanzoup.cn/627173879012.html















 6463
6463











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









