







参考资料:https://www.zhihu.com/question/34547955/answer/60632741
控制率:指的是飞行过程中输入和输出所遵循的一种算法。
飞行控制律一般是利用飞行器的状态(位置、姿态、线速度、角速度等)和控制算法解算出飞行所需要的舵偏(升降舵、方向舵、副翼)、油门(发动机转速),然后将相应的控制量输出至执行机构(舵和发动机),从而控制飞机按照控制律设计的目标进行飞行。
可以举一个例子来说明一下控制律的作用:人骑自行车沿直线行走,车把好似方向舵,脚蹬好比油门,人眼可以当做空速管、GPS、惯导等传感器,人脑可以比作机载计算机,你驾驶自行车沿直线行走的大脑算法就是所谓的飞行控制律。人眼观察到自行车跟期望直线的偏差后传输给大脑,大脑通过自己脑中的算法根据这个偏差计算出手应该偏转多少,脚应该用多大力蹬车才能使自行车沿直线行走。
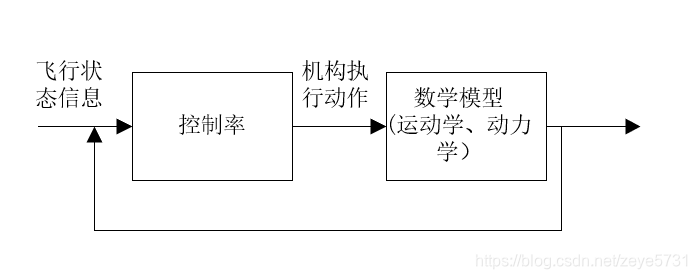
一般而言,除了PID控制以外,线性控制律和非线性控制律的设计都需要有一个表征飞机运动的数学模型。数学模型越精确,控制律的控制效果往往越好。数学模型一般包括运动学方程和动力学方程。运动学方程就是刚体一般运动方程,动力学模型根据不同的飞行器布局会有不同的方程,一般而言需要对气动力(矩)、重力、附加惯性力(浮空器一般需要)、等进行建模。但是对于飞机这种复杂的系统而言,往往难以获得精确的数学模型,尤其对于直升机而言,模型几乎不可得。因此,现在往往利用智能控制方法(模糊控制、神经网络、模式识别等)对飞行器模型中的不确定项(气动建模不准确、执行机构动力学建模不准确)和环境的未知扰动(风扰)进行估计。控制律的设计也需要有一个控制目标和控制精度要求。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











