









SD-Host 数据控制模块
SD_DATA_FSM
数据发送/接收控制模块,根据输入的控制信号,进行状态机的跳转判定,以控制sd_data_send_shift_register和sd_data_receive_shift_register模块进行符合SD协议的数据处理过程。
状态转换图

PS:右边SEND_END_BIT状态后应该加入一个CRC_STATUS_WAIT (等对方发Start bit,然后再接收crc 状态)
STATE_STOP :停止状态,in_data_ready高有效时(写:sd_fifo_full, 读:命令发送完),状态机进入STATE_IDLE状态;
STATE_IDLE: 读写判断状态,in_data_direction高有效时,表示host准备开始发送数据,进入STATE_END_WAIT状态,反之,则表示host准备开始接收数据,进入RECEIVE_WAIT状态
STATE_WAIT_RECEIVE : 读操作准备状态,首先判断已接收的数据块是否满足要求,若满足,则跳入STATE_STOP,状态机停止工作,并给出状态信号read_to_error.最后,检测数据线data[0]是否低有效,有效则跳入STATE_RECEIVE状态,否则保持;
STATE_RECEIVE :数据读操作处理过程,并需要判断每块byte数据是否读完(has_receive_bit == need_to_receive_bit-1),满足则跳入STATE_RECEIVE_CRC状态,否则保持;
STATE_RECEIVE_CRC :判断每块crc数据是否读完(receive_crc_counter ==15,数据的时候对应CRC16,命令CRC7),满足则跳入STATE_RECEIVE_END_BIT状态,否则保持;
STATE_RECEIVE_END_BIT :首先判断已接收的数据块是否满足要求,若满足,则跳入STATE_STOP,状态机停止工作。不满足,则跳入STATE_WAIT_RECEIVE状态;
PS:STATE_RECEIVE 和 STATE_RECEIVE_END_BIT状态都进行已读取数据块的判断,但其作用不同:(下面DATA_STATE_WAIT_SEND和STATE_SEND_BUSY类似)STATE_RECEIVE 状态的判断,是允许提前结束读操作的。此状态内,软件修改参数need_to_receive_block(大小为has_receive_blcok+1),使得硬件状态机结束;STATE_RECEIVE_END_BIT状态的判断是正常情况下的操作,即软件配置操作值need_to_receive_block之后,host硬件必须从device读取相等大小数据块;
DATA_STATE_WAIT_SEND :数据输出等待状态,在条件fifo已被写满情况下,判断所有数据块是否发送完成,满足则跳入STATE_STOP状态,状态机停止工作。否则进行data[0]数据判断,高有效,跳入DATA_STATE_SNED_Z状态,否则保持;
DATA_STATE_SNED_Z:不做任何数据处理,进入DATA_STATE_SNED_P状态;
DATA_STATE_SNED_P:总线方向改变方向;
DATA_STATE_SNED_BIT:开始数据发送状态,跳入STATE_SEND状态;
DATA_SEND:数据发送状态,单块数据所有bit发送完成后(has_send_bit==need_to_send_bit-1),进入STATE_SEND_CRC状态,否则保持;
STATE_SEND_CRC:CRC数据发送状态,完成后,跳入STATE_SEND_END_BIT;
STATE_SEND_END_BIT:结束位发送状态,并用于数据线的方向切换(状态中间点),进入STATE_RECEIVE_CRC_STATUS状态;
STATE_SEND_BUSY:数据块传输结束判断状态,所有block发送结束,跳入STATE_STOP状态,停止操作。否则,进入DATA_STATE_WAIT_SEND状态,等待下一次块数据传输的开始。
信号描述
| signals | I/O | Width | from | to | declaration |
|---|---|---|---|---|---|
| in_sd_clk | input | 1 | sd_clk | ||
| hrst_n | input | 1 | AHB bus | 异步复位 | |
| in_soft_reset | input | 1 | 软件复位 | ||
| in_data_ready | input | 1 | sd_if | 状态机启动信号 | |
| in_sd_data | input | [3:0] | sd_card | 数据读入端口 | |
| in_data_direction | input | 1 | sd_if | host读写控制信号:1/write 0/read | |
| need_to_receive_byte | input | [10:0] | sd_if | 控制器每块接收的数据量 | |
| need_to_send_byte | input | [10:0] | sd_if | 控制器每块发送的数据量 | |
| need_to_receive_block | input | [31:0] | sd_if | 控制器 | |
| need_to_send_block | input | [31:0] | sd_if | 控制器需发送的块数据大小 | |
| in_data_width | input | 1 | sd_if | host使用数据线判定信号:1/4 data line | |
| in_read_to | input | [31:0] | sd_if | host读操作time out时间,超出则状态机返回STOP状态 | |
| current_state | output | [3:0] | sd_if sd_data_send sd_data_receive | 当前状态标志位 | |
| next_state | output | [3:0] | sd_data_send | 次状态标志位 | |
| has_send_bit_counter_en | output | 1 | 发送bit数计数器使能 | ||
| send_crc_counter | output | [3:0] | sd_data_send | 已发送crc数据的bit大小,作为sd_data_send_shift_register模块的CRC输出控制信号 | |
| has_send_bit | output | [13:0] | sd_data_send | Host已发送的数据bit大小 | |
| receive_crc_status_counter | output | [1:0] | 计数接收crc status的周期(时序) | ||
| has_receive_bit | output | [13:0] | sd_data_receive | Host已接收的数据bit大小 | |
| out_transfer_complete | output | 1 | sd_if | 数据传输结束状态标志位 | |
| interval_counter | output | [1:0] | sd_data_send | 单块block写结束位时钟计数器,用于数据端口方向位的控制 | |
| out_read_to_error | output | 1 | sd_if | 读操作timeout标志位,ISR位 | |
| one_bk_re_end | output | 1 | sd_if | 一个block数据读操作结束状态位,用于硬件停时钟 |
verilog实现
module (
in_sd_clk, //clock for sd card
hrst_n, //ahb reset signal
in_soft_reset, //software reset
in_data_ready, //data fsm ready signal
sd_fifo_full,
in_sd_data, //data input from sd card
in_data_direction, //data direction 1:write 0:read
need_to_receive_byte, //block length
need_to_receive_block, //block number
need_to_send_byte, //block length
need_to_send_block, //block number
in_data_width, //data width 1:4bit 0:1bit
in_read_to, //time of read data fsm
current_state, //current state of data fsm
next_state, //next state of data fsm
has_send_bit_counter_en,//has send bit counter enable
send_crc_counter, //has sent crc bits counter
has_send_bit, //has send data bits counter
receive_crc_status_counter, //has receive crc status bits counter
has_receive_bit, //has receive data bits counter
out_transfer_complete, //indicate data transfer has completed
interval_counter, //time interval between data end bit and crc status
out_read_to_error, //read timeout error flag
one_bk_re_end
);
input in_sd_clk; //clock for sd card
input hrst_n; //ahb reset signal
input in_soft_reset; //software reset
input in_data_ready;
input sd_fifo_full;
input [3:0] in_sd_data; //data input from sd card
input in_data_direction; //data direction 1:write 0:read
input [10:0] need_to_receive_byte; //block length
input [10:0] need_to_receive_block; //block number
input [31:0] need_to_send_byte; //block length
input [31:0] need_to_send_block; //block number
input in_data_width; //data width 1:4bit 0:1bit
input [31:0] in_read_to; //time of read data fsm
output [3:0] current_state; //current state of data fsm
output [3:0] next_state; //next state of data fsm
output has_send_bit_counter_en;//has send bit counter enable
output [3:0] send_crc_counter; //has sent crc bits counter
output [13:0] has_send_bit; //has send data bits counter
output [1:0] receive_crc_status_counter; //has receive crc status bits counter
output [13:0] has_receive_bit; //has receive data bits counter
output out_transfer_complete; //indicate data transfer has completed
output [1:0] interval_counter; //time interval between data end bit and crc status
output out_read_to_error; //read timeout error flag
output one_bk_re_end;
out_transfer_complete;
reg [3:0] eurrent_state;
reg [3:0] next_state;
reg has_receive_bit_counter_en;
reg has_send_bit_counter_en;
reg has_receive_block_counter_en;
reg has_send_block_counter_en;
reg receive_crc_counter_en;
reg read_resp_time_counter_en;
reg send_crc_counter_en;
reg interval_counter_en;
reg receive_crc_status_counter_en;
reg [13:0] has_receive_bit;
reg [13:0] has_send_bit;
reg [31:0] has_receive_block;
reg [31:0] has_send_block;
reg [3:0] receive_crc_counter;
reg [31:0] read_resp_time_counter;
reg [31:0] send_crc_counter;
reg [1:0] interval_counter;
reg [1:0] receive_crc_status_counter;
reg out_read_to_error;
wire one_bk_re_end_tp;
reg one_bk_re_end;
wire [13:0] need_to_send_bit;
wire [13:0] need_to_receive_bit;
wire [13:0] need_to_send_bit_4;
wire [13:0] need_to_receive_bit_4;
//--------------------------------------------------------
// Beginning of main code
//--------------------------------------------------------
//将要接收/发送的字节数转化为bit数,用于计数比较
assign need_to_send_bit = {need_to_send_byte,3'b0};
assign need_to_receive_bit = {need_to_receive_byte,3'b0};
assign need_to_send_bit_4 = {2'b0,need_to_send_byte,1'b0};
assign need_to_receive_bit_4 = {2'b0,need_to_receive_byte,1'b0};
//----------------------------------------------------------------------
// Data fsm
//----------------------------------------------------------------------
// State description:
//
// DATA_STATE_STOP is the reset state of data fsm
// DATA_STATE_IDLE determines the data direction
// DATA_STATE_WAIT_RECEIVE waits for the start bit of data from sd card
// DATA_STATE_RECEIVE receives payload data from sd card
// DATA_STATE_RECEIVE_CRC receives crc of data from sd card
// DATA_STATE_RECEIVE_END_BIT receives the end bit of data from sd card and
// determines if all blocks have sent
// DATA_STATE_WAIT_SEND waits to send data to sd card until sd is not busy
// DATA_STATE_SEND sends payload data to sd card
// DATA_STATE_SEND_CRC send crc of data to sd card
// DATA_STATE_SEND_END_BIT send the end bit of the data to sd card
// DATA_STATE_RECEIVE_CRC_STATUS receives the crc status of data sent from sd
// card
// DATA_STATE_SEND_BUSY determines if all blcks have been sent
// DATA_STATE_START_BIT sends the start bit of data to sd card
// DATA_STATE_SEND_Z sends a Z bit to sd card
// DATA_STATE_SEND_P sends a P bit to sd card
//fsm1
always @ (posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
current_state <= `CMD_STATE_STOP;
else if(!in_soft_reset)
current_state <= `CMD_STATE_STOP;
else
current_state <= next_state;
end
//fsm2
always @(*) begin
out_read_to_error = 1'b0;
case (current_state)
`DATA_STATE_STOP: //0
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(in_data_ready)
next_state = `DATA_STATE_IDLE;
else
next_state = `DATA_STATE_STOP;
end
`DATA_STATE_IDLE: //1
//IDLE状态判断读/写sd,进入读写等待状态
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(!in_data_direction)
next_state = `DATA_STATE_WAIT_RECEIVE;
else
next_state = `DATA_STATE_WAIT_SEND;
end
`DATA_STATE_WAIT_RECEIVE: //2
//数据等待接收状态:所有blcok收完STOP;读超时STOP;
//接收到数据的开始位data[0]==0,进入数据接收模式
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
if (has_receive_block == need_to_receive_block)
begin
next_state = `DATA_STATE_STOP;
out_transfer_complete = 1'b1;
end
else if (read_resp_time_counter == in_read_to)
begin
next_state = `DATA_STATE_STOP;
out_read_to_error = 1'b1;
end
else begin
if(!in_sd_data[0])
next_state = `DATA_STATE_RECEIVE;
else begin
next_state = `DATA_STATE_WAIT_RECEIVE;
read_resp_time_counter_en = 1'b1;
end
end
end
`DATA_STATE_RECEIVE: //3
//数据接收状态,启用接收bit计数器,需要接收的bit全接收了
//进入接收crc的状态,
begin
//has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(!in_data_width) begin
if (has_receive_bit == need_to_receive_bit - 1)
begin
next_state = `DATA_STATE_RECEIVE_CRC;
has_receive_bit_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_RECEIVE;
has_receive_bit_counter_en = 1'b1;
end
end
else begin
if (has_receive_bit_4 == (need_to_receive_bit_4 - 1))
begin
next_state = `DATA_STATE_RECEIVE_CRC;
has_receive_bit_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_RECEIVE;
has_receive_bit_counter_en = 1'b1;
end
end
end
`DATA_STATE_RECEIVE_CRC: //4
//接收crc状态,启用接收crc计数器,接收完成进入,接收end_bit状态
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
//receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(receive_crc_counter == 15) begin
next_state =`DATA_STATE_RECEIVE_END_BIT;
receive_crc_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_REVEIVE_CRC;
receive_crc_counter_en = 1'b1;
end
end
`DATA_STATE_RECEIVE_END_BIT: //5
//接收end_bit,全部block接收完则回到STOP
//否则blcok计数器启用,调到等待接收,启用被释放,相当于block计数只加了1
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
//has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(has_receive_block == (need_to_receive_block - 1)) begin
next_state = `DATA_STATE_STOP;
has_receive_block_counter_en = 1'b0;
out_transfer_complete = 1'b1;
end
else begin
next_state = `DATA_STATE_WAIT_RECEIVE;
has_receive_block_counter_en = 1'b1;
end
end
`DATA_STATE_WAIT_SEND: //6
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if(sd_fifo_full) begin
if(has_send_block == need_to_send_block)
begin
next_state = `DATA_STATE_STOP;
out_transfer_complete = 1'b1;
end
else begin
// if (!in_sd_data[0])
if (in_sd_data[0])
next_state = `DATA_STATE_WAIT_SEND;
else
next_state = `DATA_STAET_SEND_Z;
end
end
else
next_state = `DATA_STATE_WAIT_SEND;
end
`DATA_STATE_SEND: //7
//启用发送bit计数,发送完数据准备发crc,
begin
has_receive_bit_counter_en = 1'b0;
//has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if (!in_data_width)
begin
if (has_send_bit == (need_send_bit - 1))
begin
next_state = `DAYA_STATE_SEND_CRC;
has_send_bit_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_SEND;
has_send_bit_counter_en = 1'b1;
end
end
else begin
if (has_send_bit == (need_to_seed_bit_4 - 1))
begin
next_state = `DAYA_STATE_SEND_CRC;
has_send_bit_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_SEND;
has_send_bit_counter_en = 1'b1;
end
end
end
`DATA_STATE_SEND_CRC: //8
//启用发送crc bit计数,发送完crc准备发end bit
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
//send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if (send_crc_counter == 15)
begin
next_state = `DATA_STATE_SEND_END_BIT;
send_crc_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_SEND_CRC;
send_crc_counter_en = 1'b1;
end
end
`DATA_STATE_SEND_END_BIT: //9
//发送完endbit ,准备接收数据是否正确的信号,
//这里应该增加一个状态更好,而不是用计数的方式
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
//这里4个周期接收EZZS
if (interval_counter == 3)
begin
next_state = `DATA_STATE_RECEIVE_CRC_STATUS;
interval_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_SNED_END_BIT;
interval_counter_en = 1'b1;
end
end
`DATA_STATE_RECEIVE_CRC_STATUS ://10
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
//这里4个周期接收status(3bit)+E
if (receive_crc_status_counter == 3)
begin
next_state = `DATA_STATE_SEND_BUSY;
receive_crc_status_counter_en = 1'b0;
end
else begin
next_state = `DATA_STATE_RECEIVE_CRC_STATUS;
receive_crc_status_counter_en = 1'b1;
end
end
`DATA_STATE_SEND_BUSY: //11
//数据块传输结束判断状态,所有block发送结束,
//跳入STATE_STOP状态,停止操作。
//否则,进入DATA_STATE_WAIT_SEND状态,等待下一次块数据传输的开始。
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
//has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
if (has_send_block == (need_to_send_block - 1))
begin
next_state = `DATA_STATE_STOP;
has_send_block_counter_en = 1'b0;
out_transfer_complete = 1'b1;
end
else begin
next_state = `DATA_STATE_WAIT_SEND;
has_send_block_counter_en = 1'b1;
end
end
`DATA_STATE_SEND_START_BIT: //12
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
next_state = `DATA_STATE_SEND;
end
`DATA_STATE_SEND_Z:
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
next_state = `DATA_STATE_SEND_P;
end
`DATA_STATE_SEND_P:
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
next_state = `DATA_STATE_SEND_START_BIT;
end
default:
begin
has_receive_bit_counter_en = 1'b0;
has_send_bit_counter_en = 1'b0;
has_receive_block_counter_en = 1'b0;
has_send_block_counter_en = 1'b0;
receive_crc_counter_en = 1'b0;
read_resp_time_counter_en = 1'b0;
send_crc_counter_en = 1'b0;
interval_counter_en = 1'b0;
receive_crc_status_counter_en = 1'b0;
out_transfer_complete = 1'b0;
next_state = `DATA_STATE_STOP;
end
endcase
end
assign one_bk_re_end_tp = (current_state == `DATA_STATE_RECEIVE_END_BIT);
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
one_bk_re_end <= 1'b0;
else
one_bk_re_end <= one_bk_re_end_tp;
//---------------------------------------------------------------------
// Has received data bits from sd card counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
has_receive_bit <= 14'b0;
else if (!in_soft_reset)
has_receive_bit <= 14'b0;
else if (current_state == `DATA_STATE_RECEIVE_CRC)
has_receive_bit <= 14'b0;
else if (has_receive_bit == (need_to_send_block - 1))
has_receive_bit <= 14'b0;
else if (has_receive_bit_counter_en)
has_receive_bit <= has_receive_bit + 1;
end
//---------------------------------------------------------------------
// Read data from sd card response time counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
read_resp_time_counter <= 32'b0;
else if (!in_soft_reset)
read_resp_time_counter <= 32'b0;
else if (current_state == `DATA_STATE_STOP)
read_resp_time_counter <= 32'b0;
else if (read_resp_time_counter == in_read_to)
read_resp_time_counter <= 32'b0;
else if (read_resp_time_counter_en)
read_resp_time_counter <= read_resp_time_counter + 1;
end
//---------------------------------------------------------------------
// Has sent data bits counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
has_send_bit <= 14'b0;
else if (!in_soft_reset)
has_send_bit <= 14'b0;
else if (current_state == `DATA_STATE_SEND_CRC)
has_send_bit <= 14'b0;
else if (has_send_bit_counter_en)
has_send_bit <= has_send_bit + 1;
end
//---------------------------------------------------------------------
// Has received crc number counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
receive_crc_counter <= 14'b0;
else if (!in_soft_reset)
receive_crc_counter <= 14'b0;
else if (receive_crc_counter == 15)
receive_crc_counter <= 14'b0;
else if (receive_crc_counter_en)
receive_crc_counter <= receive_crc_counter + 1;
end
//---------------------------------------------------------------------
// Has received block number counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
has_receive_block <= 32'b0;
else if (!in_soft_reset)
has_receive_block <= 32'b0;
else if (current_state == `DATA_STATE_STOP)
has_receive_block <= 32'b0;
else if (has_receive_block_counter_en)
has_receive_block <= has_receive_block + 1;
end
//---------------------------------------------------------------------
// Has sent block number counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
has_send_block <= 32'b0;
else if (!in_soft_reset)
has_send_block <= 32'b0;
else if (current_state == `DATA_STATE_STOP)
has_send_block <= 32'b0;
else if (has_send_block_counter_en)
has_send_block <= has_send_block + 1;
end
//---------------------------------------------------------------------
// Time interval between the end bit of sent data and crc status counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
interval_counter <= 2'b0;
else if (!in_soft_reset)
interval_counter <= 2'b0;
else if (interval_counter == 3)
interval_counter <= 2'b0;
else if (interval_counter_en)
interval_counter <= interval_counter + 1;
end
//---------------------------------------------------------------------
// Has receive crc status bits counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
receive_crc_status_counter <= 2'b0;
else if (!in_soft_reset)
receive_crc_status_counter <= 2'b0;
else if (receive_crc_status_counter == 3)
receive_crc_status_counter <= 14'b0;
else if (receive_crc_status_counter_en)
receive_crc_status_counter <= receive_crc_status_counter + 1;
end
//---------------------------------------------------------------------
// Has sent crc bits counter
//---------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
send_crc_counter <= 14'b0;
else if (!in_soft_reset)
send_crc_counter <= 14'b0;
else if (send_crc_counter == 15)
send_crc_counter <= 14'b0;
else if (send_crc_counter_en)
send_crc_counter <= send_crc_counter + 1;
end
endmodule
sd_data_send_shift_register
data数据的发送模块,根据sd_data_fsm模块状态机的状态,读取内部fifo数据和CRC数据,拆分成bit数据,送入data line。并根据接收的状态数据,判定一块数据发送是否正确
功能描述:
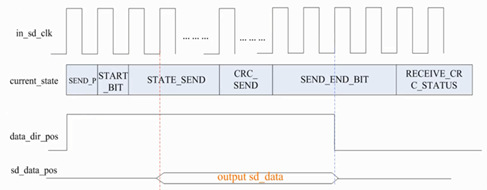
1、数据线方向控制,根据状态信息,判定数据IO线是输入还是输出;
下图所示的是在低速时钟下,host数据发送和方向控制时序。在下降沿对输出的方向控制寄存器,得到下降沿输出数据。根据信号in_high_speed_clk (host是否工作在高速时钟情况),判定是下降沿输出还是上升沿输出。
2、数据的输出:
a. fifo数据的swap,fifo数据是地址顺序存储的(the first byte is the least significant byte ),但host数据的输出就是FIFO数据左移数来的最高位,不符合sd协议,输出前需要4个byte的swap调整;
b. 读入FIFO数据和模块生成的CRC数据左移输出。
3、CRC数据的生成;
4、数据输出错误判定;
信号描述
| signals | I/O | Width | from | to | declaration |
|---|---|---|---|---|---|
| in_sd_clk | input | 1 | sd_clk | 时钟信号 | |
| hrst_n | input | 1 | 异步复位 | ||
| in_soft_reset | input | 1 | 软件复位 | ||
| in_sd_data | input | [3:0] | 数据读入端口(接收crc) | ||
| sd_fifo_rdata | input | [31:0] | fifo数据读出数据端口 | ||
| in_current_state | input | [3:0] | sd_data_fsm | 数据当前状态标志位 | |
| in_next_state | input | [3:0] | sd_data_fsm | 数据次状态标志位 | |
| in_data_width | input | 1 | sd_if | host使用数据线判定信号:1/4 data line | |
| in_send_crc_counter | input | [3:0] | sd_data_fsm | host已发送crc数据的bit大小 | |
| in_has_send_bit | input | [13:0] | sd_data_fsm | Host已发送的数据bit大小 | |
| in_interval_counter | input | [1:0] | sd_data_fsm | 单块block写结束位时钟计数器,用于数据端口方向位的控制 | |
| in_high_speed_clk | input | 1 | sd_if | 数据输出方式,1:高速 0:低速 | |
| out_serial_data | output | [3:0] | sd_card | 向sd card 输入数据 | |
| sd_fifo_re | output | 1 | fifo | fifo读请求信号 | |
| out_crc_status_wrong | output | 1 | sd_if | 数据发送crc检验错误 | |
| out_data_dir | output | [3:0] | 数据方向控制端口 1 发送到sd card | ||
| out_data_half_delay | output | [3:0] | 数据输出端口(高速:上升沿 低速:下降沿) | ||
| in_TestMode | output | 1 | 测试模式 |
verilog 实现
module sd_data_send_shift_register (
in_sd_clk,
hrst_n,
in_soft_reset,
in_sd_data,
sd_fifo_rdata,
in_current_state,
in_next_state,
in_data_width,
in_send_crc_counter,
in_has_send_bit,
in_interval_counter,
in_high_speed_clk,
out_serial_data,
sd_fifo_re,
out_crc_status_wrong,
out_data_dir,
out_data_half_delay
);
input in_sd_clk; //clock for sd card
input hrst_n; //ahb signal
input in_soft_reset; //software reset
input [3:0] in_sd_data; //data input drom sd card
input [31:0] sd_fifo_rdata; //parallel data from tx fifo
input [3:0] in_current_state; //current state of data fsm
input [3:0] in_next_state; //next state of data fsm
input in_data_width; //data width 1:4bit 0:1bit
input [3:0] in_send_crc_counter; //has sent crc bits
input [13:0] in_has_send_bit; //has sent data bits
input [1:0] in_interval_counter; //time interval
input in_high_speed_clk;
output [3:0] out_serial_data; //original serial output data
output sd_fifo_re; //tx fifo read enable
output out_crc_status_wrong; //crc status wrong flag
output [3:0] out_data_dir; //data direction 1:send
output [3:0] out_data_half_delay; //serial output data to sd card
reg [3:0] out_serial_data;
reg [31:0] shift_reg0;
reg [15:0] crc_reg0;
reg [15:0] crc_reg1;
reg [15:0] crc_reg2;
reg [15:0] crc_reg3;
reg [15:0] crc_shift_reg0;
reg [15:0] crc_shift_reg1;
reg [15:0] crc_shift_reg2;
reg [15:0] crc_shift_reg3;
reg [0:31] data_for_send;
reg [3:0] crc_status_reg;
reg sd_fifo_re;
reg out_crc_status_wrong;
reg [3:0] out_data_half_delay_tp;
reg [3:0] data_dir_nes;
wire [31:0] sd_fifo_rdata_tp;
wire [3:0] data_dir_pos;
//-------------------------------------------------------------------
// Beginning of main code
//---------------------------------------------------------------------
// Overview of the data send shift register operation
// The following key signals are used in the command send shift register
// out_data_dir is the data direction
// out_data_half_delay is the output data to sd card
// crc_reg3 is the denerated data crc register
// crc_reg2 is the denerated data crc register
// crc_reg1 is the denerated data crc register
// crc_reg0 is the denerated data crc register
// sd_fifo_rdata is the parallel data from tx fifo
// sd_fifo_re is the tx fifo read enable signal
// crc_status_reg is the crc status from sd card after sending data
//-----------------------------------------------------------------------
// Output data to sd card
//---------------------------------------------------------------------
//the data was sent at negedge
always @(negedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n) begin
out_data_half_delay_tp <= 4'b1111;
end
else begin
out_data_half_delay_tp <= out_serial_data;
//用clk下降沿打拍,延迟半个周期
end
end
//数据输出端口(高速:上升沿 低速:下降沿) ??讲者说考虑timing 切换相位可以满足时序
assign out_data_half_delay = in_high_speed_clk ? out_serial_data : out_data_half_delay_tp;
//-----------------------------------------------------------------------------
// Data direction 0:receive 1:send
//------------------------------------------------------------------------------
//输出使能,向sd方向
assign data_dir_pos[0] = ( (in_current_state == `DATA_STATE_SEND_P) ||
(in_current_state == `DATA_STATE_SEND_START_BIT) ||
(in_current_state == `DATA_STATE_SEND) ||
(in_current_state == `DATA_STATE_SEND_CRC) ||
((in_current_state == `DATA_STATE_SEND_END_BIT) &&
((in_interval_counter == 0) || (in_interval_counter == 1)))
);
assign data_dir_pos[1] = in_data_width && ((in_current_state == `DATA_STATE_SEND_P) ||
(in_current_state == `DATA_STATE_SEND_START_BIT) ||
(in_current_state == `DATA_STATE_SEND) ||
(in_current_state == `DATA_STATE_SEND_CRC) ||
((in_current_state == `DATA_STATE_SEND_END_BIT) &&
((in_interval_counter == 0) || (in_interval_counter == 1)))
);
assign data_dir_pos[2] = in_data_width && ((in_current_state == `DATA_STATE_SEND_P) ||
(in_current_state == `DATA_STATE_SEND_START_BIT) ||
(in_current_state == `DATA_STATE_SEND) ||
(in_current_state == `DATA_STATE_SEND_CRC) ||
((in_current_state == `DATA_STATE_SEND_END_BIT) &&
((in_interval_counter == 0) || (in_interval_counter == 1)))
);
assign data_dir_pos[3] = in_data_width && ((in_current_state == `DATA_STATE_SEND_P) ||
(in_current_state == `DATA_STATE_SEND_START_BIT) ||
(in_current_state == `DATA_STATE_SEND) ||
(in_current_state == `DATA_STATE_SEND_CRC) ||
((in_current_state == `DATA_STATE_SEND_END_BIT) &&
((in_interval_counter == 0) || (in_interval_counter == 1)))
);
// assign data_dir_pos[1] = in_data_width && data_dir_pos[0];
// assign data_dir_pos[2] = data_dir_pos[1];
// assign data_dir_pos[3] = data_dir_pos[1];
always @(negedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n) begin
data_dir_nes <= 4'b0
end
else begin
data_dir_nes <= {data_dir_pos[3],data_dir_pos[2],data_dir_pos[1],data_dir_pos[0]};
end
end
// out_data_dir 端口方向的控制??
assign out_data_dir = in_high_speed_clk ? data_dir_pos :data_dir_nes;
//---------------------------------------------------------------------------------
// Generate output data to sd card 1ibt and 4bit mode and receive crc status bits
// -------------------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n) begin
shift_reg0 <= 32'b0;
out_serial_data <= 4'b1111;
crc_status_reg <= 4'b0;
crc_shift_reg0 <= 16'b0;
crc_shift_reg1 <= 16'b0;
crc_shift_reg2 <= 16'b0;
crc_shift_reg3 <= 16'b0;
end
else if (!in_soft_reset)
begin
shift_reg0 <= 32'b0;
out_serial_data <= 4'b1111;
crc_status_reg <= 4'b0;
crc_shift_reg0 <= 16'b0;
crc_shift_reg1 <= 16'b0;
crc_shift_reg2 <= 16'b0;
crc_shift_reg3 <= 16'b0;
end
else
begin
if(!in_data_width)
begin
if (in_current_state == `DATA_STATE_SEND_START_BIT)
//send start bit
out_serial_data[0] <= 1'b0;
else if (in_current_state == `DATA_STATE_SEND)
begin
//每32个bit,重新赋一个值(从fifo中读出得到)
if (in_has_send_bit[4:0] == 5'b0)
{out_serial_data[0],shift_reg0} <= {sd_fifo_rdata_tp,1'b0};
else
{out_serial_data[0],shift_reg0} <= {shift_reg0,1'b0};
//向左移位输出,并行转串行
end
else if (in_current_state == `DATA_STATE_SEND_CRC)
begin
if (in_send_crc_counter == 0)
{out_serial_data[0],crc_shift_reg0} <= {crc_reg0,1'b0};
else
{out_serial_data[0],crc_shift_reg0} <= {crc_shift_reg0,1'b0};
end
else if (in_current_state == `DATA_STATE_SEND_END_BIT)
begin
out_serial_data[0] <= 1'b1;
end
//DATA_STATE_RECEIVE_CRC_STATUS 这里sd 数据线的方向变化,变为接收crc_status
else if (in_current_state == `DATA_STATE_RECEIVE_CRC_STATUS)
begin
crc_status_reg <= {crc_status_reg[2:0], in_sd_data[0]};
end
else if (in_current_state == `DATA_STATE_WAIT_SEND)
begin
crc_status_reg <= 4'b0;
end
end
else
begin
if (in_current_state == `DATA_STATE_SEND_START_BIT)
out_serial_data <= 4'b0;
else if (in_current_state == `DATA_STATE_SEND)
begin
if (in_has_send_bit[2:0] == 3'b0)
{out_serial_data,shift_reg0} <= {sd_fifo_rdata_tp,4'b0};
else
{out_serial_data,shift_reg0} <= {shift_reg0,4'b0};
end
else if (in_current_state == `DATA_STATE_SEND_CRC)
begin
if(in_send_crc_counter == 0)
begin
{out_serial_data[3],crc_shift_reg3} <= {crc_reg3,1'b0};
{out_serial_data[2],crc_shift_reg2} <= {crc_reg2,1'b0};
{out_serial_data[1],crc_shift_reg1} <= {crc_reg1,1'b0};
{out_serial_data[0],crc_shift_reg0} <= {crc_reg0,1'b0};
end
else
begin
{out_serial_data[3],crc_shift_reg3} <= {crc_shift_reg3,1'b0};
{out_serial_data[2],crc_shift_reg2} <= {crc_shift_reg2,1'b0};
{out_serial_data[1],crc_shift_reg1} <= {crc_shift_reg1,1'b0};
{out_serial_data[0],crc_shift_reg0} <= {crc_shift_reg0,1'b0};
end
end
else if (in_current_state == `DATA_STATE_RECEIVE_CRC_STATUS)
begin
crc_status_reg <= {crc_status_reg[2:0],in_sd_data[0]};
end
else if (in_current_state ==`DATA_STATE_WAIT_SEND)
crc_status_reg <= 4'b0
end
end
end
//----------------------------------------------------
// Generate output data crc
//----------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n) begin
crc_reg3 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg0 <= 16'b0;
end
else if (!in_soft_reset) begin
crc_reg3 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg0 <= 16'b0;
end
else if (in_current_state == `DATA_STATE_WAIT_SEND)
begin
crc_reg3 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg0 <= 16'b0;
end
else if (in_current_state == `DATA_STATE_SEND)
begin
if (!in_data_width)
begin
crc_reg0[0] <= data_for_send[in_has_send_bit[4:0]] ^ crc_reg0[15];
crc_reg0[1] <= crc_reg0[0];
crc_reg0[2] <= crc_reg0[1];
crc_reg0[3] <= crc_reg0[2];
crc_reg0[4] <= crc_reg0[3];
crc_reg0[5] <= crc_reg0[4] ^ data_for_send[in_has_send_bit[4:0]] ^ crc_reg0[15];
crc_reg0[6] <= crc_reg0[5];
crc_reg0[7] <= crc_reg0[6];
crc_reg0[8] <= crc_reg0[7];
crc_reg0[9] <= crc_reg0[8];
crc_reg0[10] <= crc_reg0[9];
crc_reg0[11] <= crc_reg0[10];
crc_reg0[12] <= crc_reg0[11] ^ data_for_send[in_has_send_bit[4:0] ^ crc_reg0[15]];
crc_reg0[13] <= crc_reg0[12];
crc_reg0[14] <= crc_reg0[13];
crc_reg0[15] <= crc_reg0[14];
end
else
begin
crc_reg3[0] <= data_for_send[{in_has_send_bit[2:0],2'b0}] ^ crc_reg3[15];
crc_reg3[1] <= crc_reg3[0];
crc_reg3[2] <= crc_reg3[1];
crc_reg3[3] <= crc_reg3[2];
crc_reg3[4] <= crc_reg3[3];
crc_reg3[5] <= crc_reg3[4] ^ data_for_send[{in_has_send_bit[2:0],2'b0}] ^ crc_reg3[15];
crc_reg3[6] <= crc_reg3[5];
crc_reg3[7] <= crc_reg3[6];
crc_reg3[8] <= crc_reg3[7];
crc_reg3[9] <= crc_reg3[8];
crc_reg3[10] <= crc_reg3[9];
crc_reg3[11] <= crc_reg3[10];
crc_reg3[12] <= crc_reg3[11] ^ data_for_send[{in_has_send_bit[2:0],2'b0}] ^ crc_reg3[15];
crc_reg3[13] <= crc_reg3[12];
crc_reg3[14] <= crc_reg3[13];
crc_reg3[15] <= crc_reg3[14];
crc_reg2[0] <= data_for_send[{in_has_send_bit[2:0],2'b0}+1] ^ crc_reg2[15];
crc_reg2[1] <= crc_reg2[0];
crc_reg2[2] <= crc_reg2[1];
crc_reg2[3] <= crc_reg2[2];
crc_reg2[4] <= crc_reg2[3];
crc_reg2[5] <= crc_reg2[4] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+1] ^ crc_reg2[15];
crc_reg2[6] <= crc_reg2[5];
crc_reg2[7] <= crc_reg2[6];
crc_reg2[8] <= crc_reg2[7];
crc_reg2[9] <= crc_reg2[8];
crc_reg2[10] <= crc_reg2[9];
crc_reg2[11] <= crc_reg2[10];
crc_reg2[12] <= crc_reg2[11] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+1] ^ crc_reg2[15];
crc_reg2[13] <= crc_reg2[12];
crc_reg2[14] <= crc_reg2[13];
crc_reg2[15] <= crc_reg2[14];
crc_reg1[0] <= data_for_send[{in_has_send_bit[2:0],2'b0}+2] ^ crc_reg1[15];
crc_reg1[1] <= crc_reg1[0];
crc_reg1[2] <= crc_reg1[1];
crc_reg1[3] <= crc_reg1[2];
crc_reg1[4] <= crc_reg1[3];
crc_reg1[5] <= crc_reg1[4] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+2] ^ crc_reg1[15];
crc_reg1[6] <= crc_reg1[5];
crc_reg1[7] <= crc_reg1[6];
crc_reg1[8] <= crc_reg1[7];
crc_reg1[9] <= crc_reg1[8];
crc_reg1[10] <= crc_reg1[9];
crc_reg1[11] <= crc_reg1[10];
crc_reg1[12] <= crc_reg1[11] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+2] ^ crc_reg1[15];
crc_reg1[13] <= crc_reg1[12];
crc_reg1[14] <= crc_reg1[13];
crc_reg1[15] <= crc_reg1[14];
crc_reg0[0] <= data_for_send[{in_has_send_bit[2:0],2'b0}+3] ^ crc_reg0[15];
crc_reg0[1] <= crc_reg0[0];
crc_reg0[2] <= crc_reg0[1];
crc_reg0[3] <= crc_reg0[2];
crc_reg0[4] <= crc_reg0[3];
crc_reg0[5] <= crc_reg0[4] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+3] ^ crc_reg0[15];
crc_reg0[6] <= crc_reg0[5];
crc_reg0[7] <= crc_reg0[6];
crc_reg0[8] <= crc_reg0[7];
crc_reg0[9] <= crc_reg0[8];
crc_reg0[10] <= crc_reg0[9];
crc_reg0[11] <= crc_reg0[10];
crc_reg0[12] <= crc_reg0[11] ^ data_for_send[{in_has_send_bit[2:0],2'b0}+3] ^ crc_reg0[15];
crc_reg0[13] <= crc_reg0[12];
crc_reg0[14] <= crc_reg0[13];
crc_reg0[15] <= crc_reg0[14];
end
end
end
//------------------------------------------------------
// Generate data for send
//------------------------------------------------------
assign sd_fifo_rdata_tp = {sd_fifo_rdata[7:0],sd_fifo_rdata[15:8],sd_fifo_rdata[23:16],sd_fifo_rdata[31:24]};
//data_for_send是[0:31] 把sd_fifo_rdata_tp 的高位放在地位,用在crc的生成
always @(*) begin
data_for_send = 32'b0;
if (in_current_state == `DATA_STATE_SEND)
data_for_send = sd_fifo_rdata_tp;
end
//-------------------------------------------------------
// GEnerate tx fifo read enable signal
//-------------------------------------------------------
always @(*) begin
sd_fifo_re = 1'b0;
if (!in_data_width)
begin
if(((in_current_state == `DATA_STATE_SEND_START_BIT) && (in_has_send_bit[4:0] == 5'b0)) ||
((in_current_state == `DATA_STATE_SEND) && (in_next_state == `DATA_STATE_SEND) && (in_has_send_bit[4:0] == 5'b11111)))
sd_fifo_re = 1'b1;
end
else begin
if(((in_current_state == `DATA_STATE_SEND_START_BIT) && (in_has_send_bit[2:0] == 3'b0)) ||
((in_current_state == `DATA_STATE_SEND) && (in_next_state == `DATA_STATE_SEND) && (in_has_send_bit[2:0] == 3'b111)))
sd_fifo_re = 1'b1;
end
end
//---------------------------------------------------------------
// Generate crc status wrong flag after sending data to sd card
//---------------------------------------------------------------
//crc的状态用3bit表示(010是OK),当状态为错误时产生数据错误信号
//应该是用高3位010判断(课上提出)?后面看波形确认
always @(*) begin
out_crc_status_wrong =1'b0;
// there crc_status_reg maybe sould be 4'b0100 ,see the wave
if((in_current_state == `DATA_STATE_SEND_BUSY) && !(crc_status_reg == 4'b0010))
out_crc_status_wrong =1'b1;
end
endmodule
sd_data_receive_shift_register
功能描述:
1、数据读入并成一个word,swap,写入fifo
2、CRC数据读取,并和内部产生的CRC数据进行对比,以判定读入的数据是否出错,以out_receive_data_crc_error信号作标志位。
信号描述
| signals | I/O | Width | from | to | declaration |
|---|---|---|---|---|---|
| in_sd_clk | input | 1 | sd_clk | 时钟信号 | |
| in_soft_reset | input | 1 | 软件复位 | ||
| in_current_state | input | [3:0] | sd_data_fsm | 数据当前状态标志位 | |
| in_serial_data | input | [3:0] | sd_card | 数据输入端口 | |
| in_data_width | input | 1 | sd_if | host使用数据线判定信号:1/4 data line | |
| in_has_receive_bit | input | [13:0] | sd_data_fsm | Host已接收的数据bit大小 | |
| sd_fifo_we | output | 1 | fifo | fifo写请求信号 | |
| sd_fifo_wdata | output | [31:0] | fifo | fifo数据写入端口 | |
| out_receive_data_crc_err | output | 1 | sd_if | 读入数据crc检验错误 |
verilog实现
module sd_data_receive_shift_register(
in_sd_clk, //clock for sd card
hrst_n,
in_soft_reset, //software reset
in_current_state, //surrent state of data fsm
in_serial_data, //data input from sd card
in_data_width, //data width 1:4bit 0:1bit
in_has_receive_bit, //has received data bits
sd_fifo_wdata, //output parallel data to rx fifo
sd_fifo_we, //host writes rx_fifo
out_receive_data_crc_error //receive data crc error flag
);
input in_sd_clk; //clock for sd card
input hrst_n;
input in_soft_reset; //software reset
input [3:0] in_current_state; //surrent state of data fsm
input [3:0] in_serial_data; //data input from sd card
input in_data_width; //data width 1:4bit 0:1bit
input [13:0] in_has_receive_bit; //has received data bits
output [31:0] sd_fifo_wdata; //output parallel data to rx fifo
output sd_fifo_we; //host writes rx_fifo
output out_receive_data_crc_error; //receive data crc error flag
reg out_receive_data_crc_error;
reg sd_fifo_we;
reg [15:0] crc_reg0;
reg [15:0] crc_reg1;
reg [15:0] crc_reg2;
reg [15:0] crc_reg3;
reg [15:0] generate_crc_reg0;
reg [15:0] generate_crc_reg1;
reg [15:0] generate_crc_reg2;
reg [15:0] generate_crc_reg3;
reg [31:0] shift_reg;
reg out_write_receive_fifo;
//------------------------------------------------------------
// Beginning of main code
//------------------------------------------------------------
// Overview of the data receive shift register operation
// the following key signals are used in the data receive shift register
// in_serial_data is the data input from sd card
// out_write_receive_fifo is the rx fifo write enable signal
// crc_regx is the received data crc
// generate_crc_regx is the generated data crc
// out_receive_data_crc_error is the data receiveing crc error flag
//assign sd_fifo_wdata =shift_reg;
assign sd_fifo_wdata = {shift_reg[7:0],shift_reg[15:8],shift_reg[23:16],shift_reg[31:24]};
//------------------------------------------------------
// Register rx fifo write enable signal
//------------------------------------------------------
always @(posedge in sd_clk or negedhe hrst_n) begin
if (!hrst_n)
sd_fifo_we <= 1'b0;
else if (!in_soft_reset)
sd_fifo_we <= 1'b0;
else
sd_fifo_we <= out_write_receive_fifo;
end
//-------------------------------------------------------------
// Serial to Parallel conversion
// ------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
shift_reg <= 32'b0;
else if (!in_soft_reset)
shift_reg <= 32'b0;
else begin
if (in_current_state == `DATA_STATE_RECEIVE)
begin
if(!in_data_width)
shift_reg <= {shift_reg[30:0],in_serial_data[0]};
else
shift_reg <= {shift_reg[27:0],in_serial_data};
end
end
end
//-------------------------------------------------------------------
//Generate rx fifo write enable signal
//-------------------------------------------------------------------
always @(*) begin
out_write_receive_fifo = 1'b0;
if (!in_data_width)
begin
if ((in_current_state == `DATA_STATE_RECEIVE) && (in_has_receive_bit[4:0] == 5'b11111))
out_write_receive_fifo = 1'b1;
end
else begin
if((in_current_state == `DATA_STATE_RECEIVE) && (in_has_receive_bit[2:0] == 3'b111))
out_write_receive_fifo = 1'b1;
end
end
//--------------------------------------------------------------------
// Receive data crc 1bit and 4bit mode
//--------------------------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n)
if (!hrst_n)
begin
crc_reg0 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg3 <= 16'b0;
end
else if (in_soft_reset)
begin
crc_reg0 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg3 <= 16'b0;
end
else if ((in_current_state == `DATA_STATE_RECEIVE_END_BIT))
begin
crc_reg0 <= 16'b0;
crc_reg1 <= 16'b0;
crc_reg2 <= 16'b0;
crc_reg3 <= 16'b0;
end
else if (in_current_state == `DATA_STATE_RECEIVE_CRC)
begin
if(in_data_width == 1'b0)
crc_reg0 <= {crc_reg0[14:0],in_serial_data[0]};
else begin
crc_reg0 <= {crc_reg0[14:0],in_serial_data[0]};
crc_reg1 <= {crc_reg1[14:0],in_serial_data[1]};
crc_reg2 <= {crc_reg2[14:0],in_serial_data[2]};
crc_reg3 <= {crc_reg3[14:0],in_serial_data[3]};
end
end
end
//-----------------------------------------------------
// Generate data crc for 1bit and 4bit mode
//-----------------------------------------------------
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
begin
generate_crc_reg0 <= 16'b0;
generate_crc_reg1 <= 16'b0;
generate_crc_reg2 <= 16'b0;
generate_crc_reg3 <= 16'b0;
end
else if (!in_soft_reset)
begin
generate_crc_reg0 <= 16'b0;
generate_crc_reg1 <= 16'b0;
generate_crc_reg2 <= 16'b0;
generate_crc_reg3 <= 16'b0;
end
else if ((in_current_state == `DATA_STATE_RECEIVE_END_BIT))
begin
generate_crc_reg0 <= 16'b0;
generate_crc_reg1 <= 16'b0;
generate_crc_reg2 <= 16'b0;
generate_crc_reg3 <= 16'b0;
end
else if (in_current_state == `DATA_STATE_RECEIVE)
begin
if (in_data_width == 1'b0)
begin
generate_crc_reg0[0] <= in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[1] <= generate_crc_reg0[0];
generate_crc_reg0[2] <= generate_crc_reg0[1];
generate_crc_reg0[3] <= generate_crc_reg0[2];
generate_crc_reg0[4] <= generate_crc_reg0[3];
generate_crc_reg0[5] <= generate_crc_reg0[4] ^ in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[6] <= generate_crc_reg0[5];
generate_crc_reg0[7] <= generate_crc_reg0[6];
generate_crc_reg0[8] <= generate_crc_reg0[7];
generate_crc_reg0[9] <= generate_crc_reg0[8];
generate_crc_reg0[10] <= generate_crc_reg0[9];
generate_crc_reg0[11] <= generate_crc_reg0[10];
generate_crc_reg0[12] <= generate_crc_reg0[11] ^ in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[13] <= generate_crc_reg0[12];
generate_crc_reg0[14] <= generate_crc_reg0[13];
generate_crc_reg0[15] <= generate_crc_reg0[14];
end
else begin
generate_crc_reg0[0] <= in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[1] <= generate_crc_reg0[0];
generate_crc_reg0[2] <= generate_crc_reg0[1];
generate_crc_reg0[3] <= generate_crc_reg0[2];
generate_crc_reg0[4] <= generate_crc_reg0[3];
generate_crc_reg0[5] <= generate_crc_reg0[4] ^ in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[6] <= generate_crc_reg0[5];
generate_crc_reg0[7] <= generate_crc_reg0[6];
generate_crc_reg0[8] <= generate_crc_reg0[7];
generate_crc_reg0[9] <= generate_crc_reg0[8];
generate_crc_reg0[10] <= generate_crc_reg0[9];
generate_crc_reg0[11] <= generate_crc_reg0[10];
generate_crc_reg0[12] <= generate_crc_reg0[11] ^ in_serial_data[0] ^ generate_crc_reg0[15];
generate_crc_reg0[13] <= generate_crc_reg0[12];
generate_crc_reg0[14] <= generate_crc_reg0[13];
generate_crc_reg0[15] <= generate_crc_reg0[14];
generate_crc_reg1[0] <= in_serial_data[1] ^ generate_crc_reg1[15];
generate_crc_reg1[1] <= generate_crc_reg1[0];
generate_crc_reg1[2] <= generate_crc_reg1[1];
generate_crc_reg1[3] <= generate_crc_reg1[2];
generate_crc_reg1[4] <= generate_crc_reg1[3];
generate_crc_reg1[5] <= generate_crc_reg1[4] ^ in_serial_data[1] ^ generate_crc_reg1[15];
generate_crc_reg1[6] <= generate_crc_reg1[5];
generate_crc_reg1[7] <= generate_crc_reg1[6];
generate_crc_reg1[8] <= generate_crc_reg1[7];
generate_crc_reg1[9] <= generate_crc_reg1[8];
generate_crc_reg1[10] <= generate_crc_reg1[9];
generate_crc_reg1[11] <= generate_crc_reg1[10];
generate_crc_reg1[12] <= generate_crc_reg1[11] ^ in_serial_data[1] ^ generate_crc_reg1[15];
generate_crc_reg1[13] <= generate_crc_reg1[12];
generate_crc_reg1[14] <= generate_crc_reg1[13];
generate_crc_reg1[15] <= generate_crc_reg1[14];
generate_crc_reg2[0] <= in_serial_data[2] ^ generate_crc_reg2[15];
generate_crc_reg2[1] <= generate_crc_reg2[0];
generate_crc_reg2[2] <= generate_crc_reg2[1];
generate_crc_reg2[3] <= generate_crc_reg2[2];
generate_crc_reg2[4] <= generate_crc_reg2[3];
generate_crc_reg2[5] <= generate_crc_reg2[4] ^ in_serial_data[2] ^ generate_crc_reg2[15];
generate_crc_reg2[6] <= generate_crc_reg2[5];
generate_crc_reg2[7] <= generate_crc_reg2[6];
generate_crc_reg2[8] <= generate_crc_reg2[7];
generate_crc_reg2[9] <= generate_crc_reg2[8];
generate_crc_reg2[10] <= generate_crc_reg2[9];
generate_crc_reg2[11] <= generate_crc_reg2[10];
generate_crc_reg2[12] <= generate_crc_reg2[11] ^ in_serial_data[2] ^ generate_crc_reg2[15];
generate_crc_reg2[13] <= generate_crc_reg2[12];
generate_crc_reg2[14] <= generate_crc_reg2[13];
generate_crc_reg2[15] <= generate_crc_reg2[14];
generate_crc_reg3[0] <= in_serial_data[3] ^ generate_crc_reg3[15];
generate_crc_reg3[1] <= generate_crc_reg3[0];
generate_crc_reg3[2] <= generate_crc_reg3[1];
generate_crc_reg3[3] <= generate_crc_reg3[2];
generate_crc_reg3[4] <= generate_crc_reg3[3];
generate_crc_reg3[5] <= generate_crc_reg3[4] ^ in_serial_data[3] ^ generate_crc_reg3[15];
generate_crc_reg3[6] <= generate_crc_reg3[5];
generate_crc_reg3[7] <= generate_crc_reg3[6];
generate_crc_reg3[8] <= generate_crc_reg3[7];
generate_crc_reg3[9] <= generate_crc_reg3[8];
generate_crc_reg3[10] <= generate_crc_reg3[9];
generate_crc_reg3[11] <= generate_crc_reg3[10];
generate_crc_reg3[12] <= generate_crc_reg3[11] ^ in_serial_data[3] ^ generate_crc_reg3[15];
generate_crc_reg3[13] <= generate_crc_reg3[12];
generate_crc_reg3[14] <= generate_crc_reg3[13];
generate_crc_reg3[15] <= generate_crc_reg3[14];
end
end
end
//----------------------------------------------------------
// Compare generated data crc with received data crc
//----------------------------------------------------------
always @(*) begin
out_receive_data_crc_error = 1'b0;
if(!in_data_width)
begin
if ((in_current_state == `DATA_STATE_RECEIVE_END_BIT) && !(crc_reg0 == generate_crc_reg0))
out_receive_data_crc_error = 1'b1;
end
else begin
if((in_current_state == `DATA_STATE_RECEIVE_END_BIT) &&
(!(crc_reg0 == generate_crc_reg0) ||
!(crc_reg1 == generate_crc_reg1) ||
!(crc_reg2 == generate_crc_reg2) ||
!(crc_reg3 == generate_crc_reg3) )
out_receive_data_crc_error = 1'b1;
end
end















 6726
6726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









