






参考文献
https://www.bilibili.com/video/BV19T4y1N7t4/?spm_id_from=333.337.search-card.all.click&vd_source=729a6769061814146bde66b399e1461f
文章目录
前言
本文就介绍ROBOGUIDE机器人仿真模拟的基础内容。
一、新建工程
1.打开软件
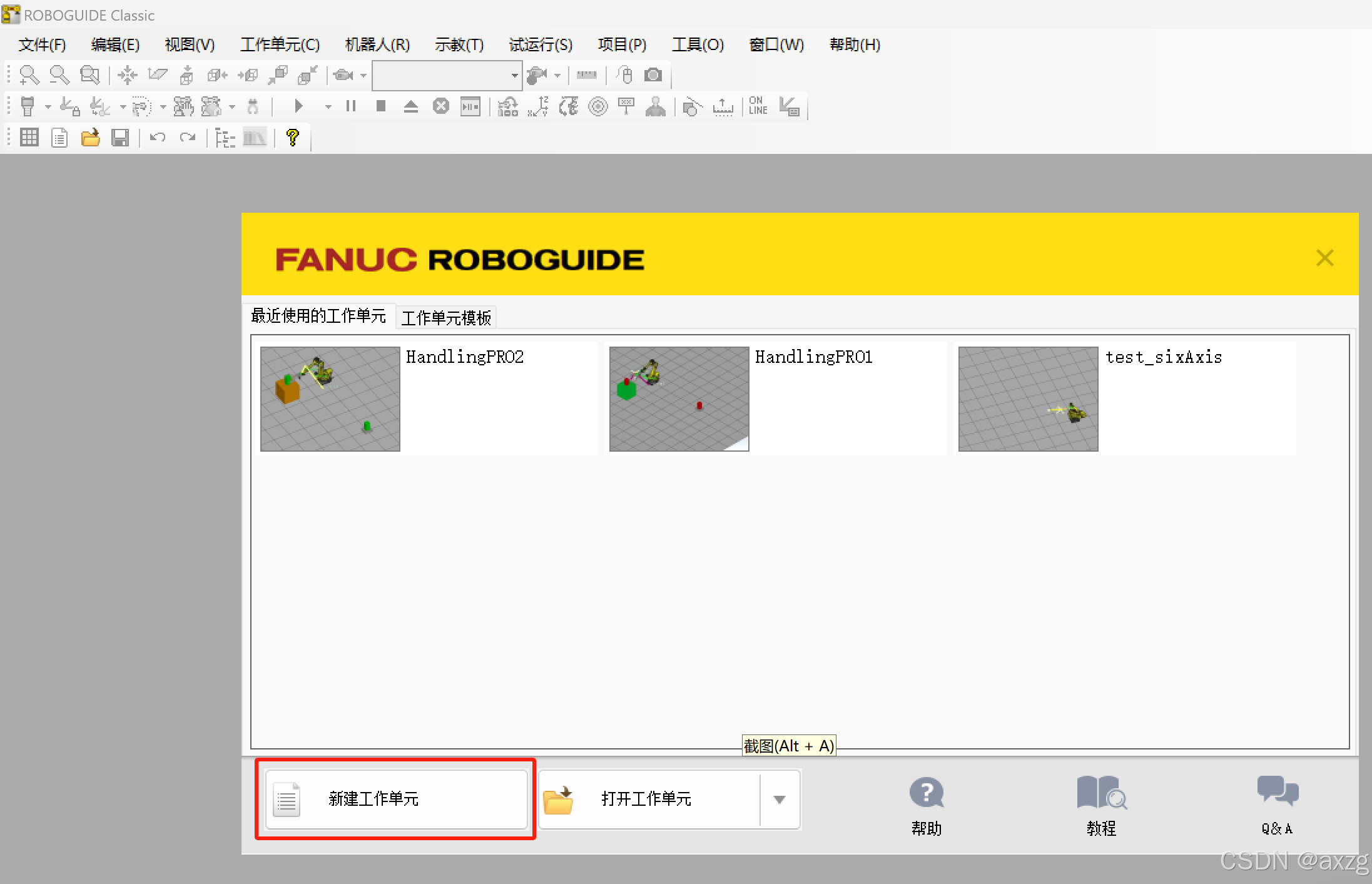
2.新建工作单元
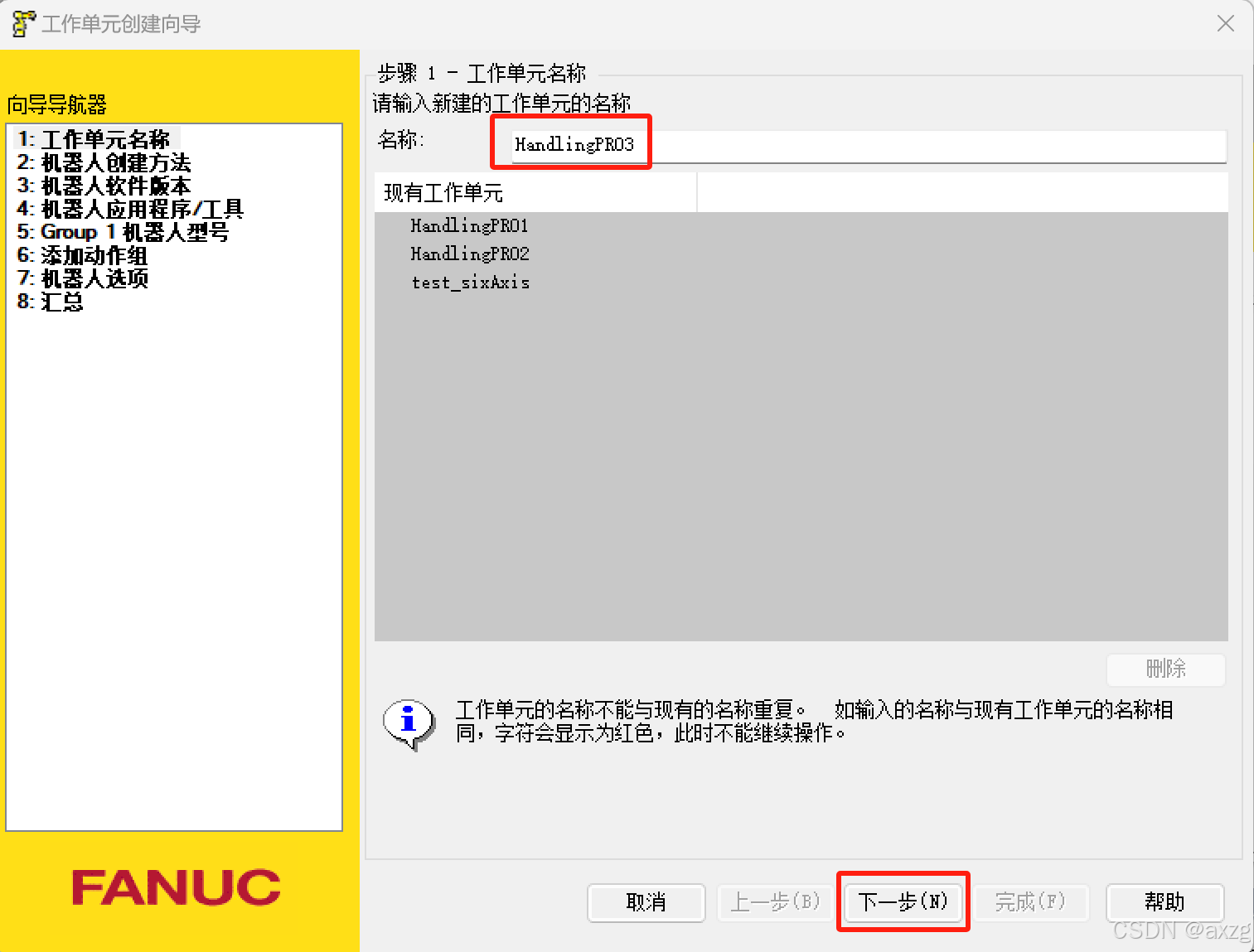
3.工作单元名称
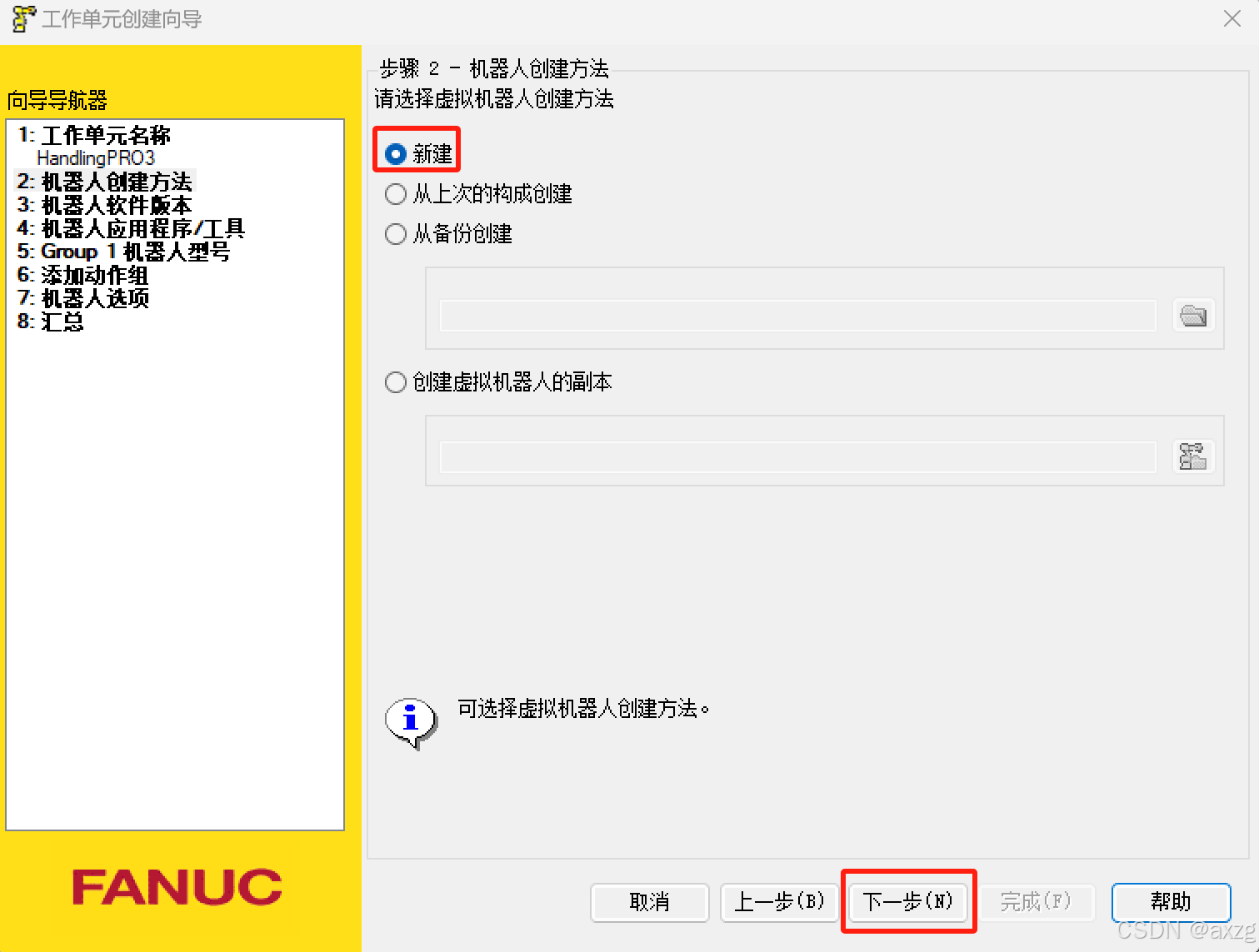
4.机器人创建
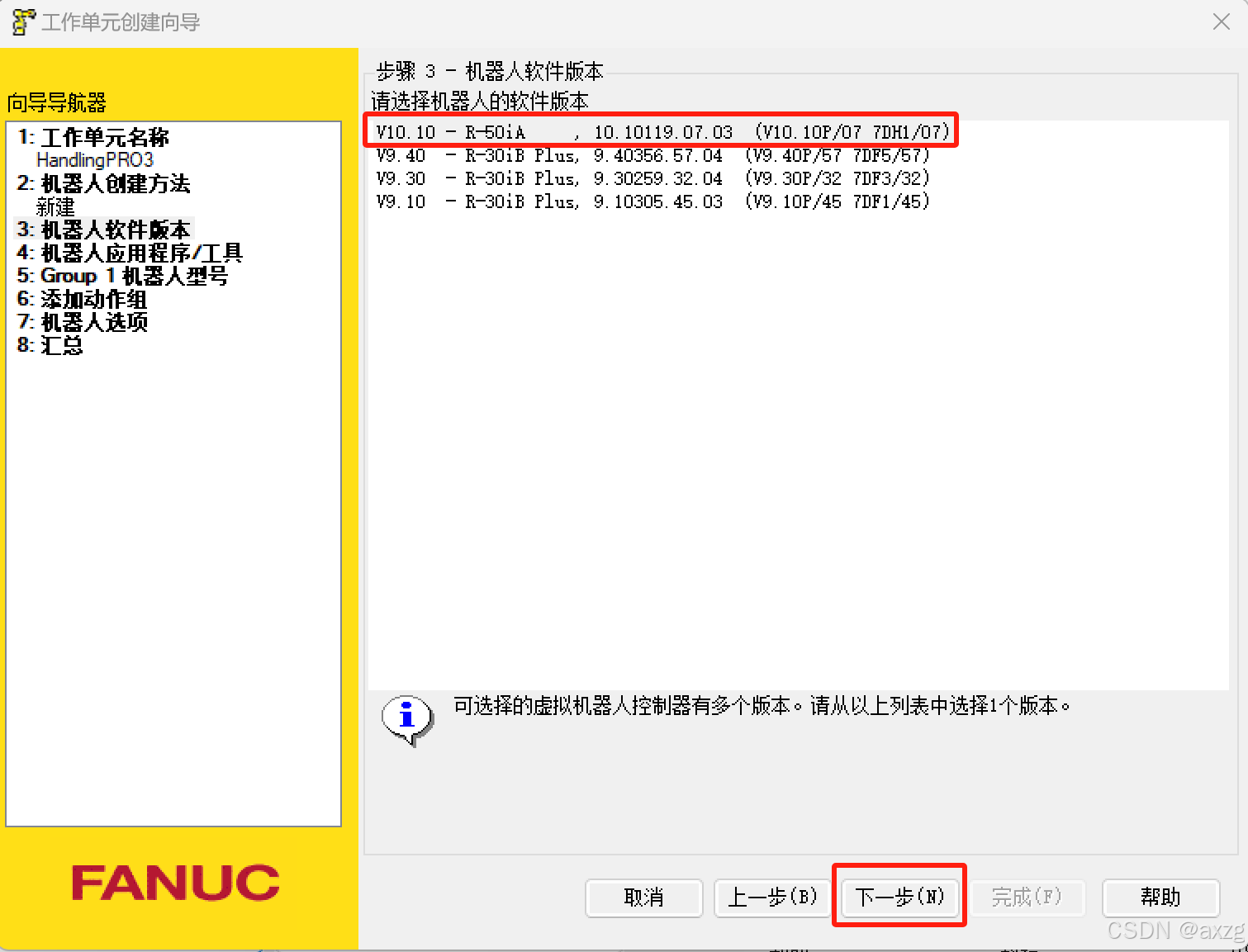
5.机器人软件版本
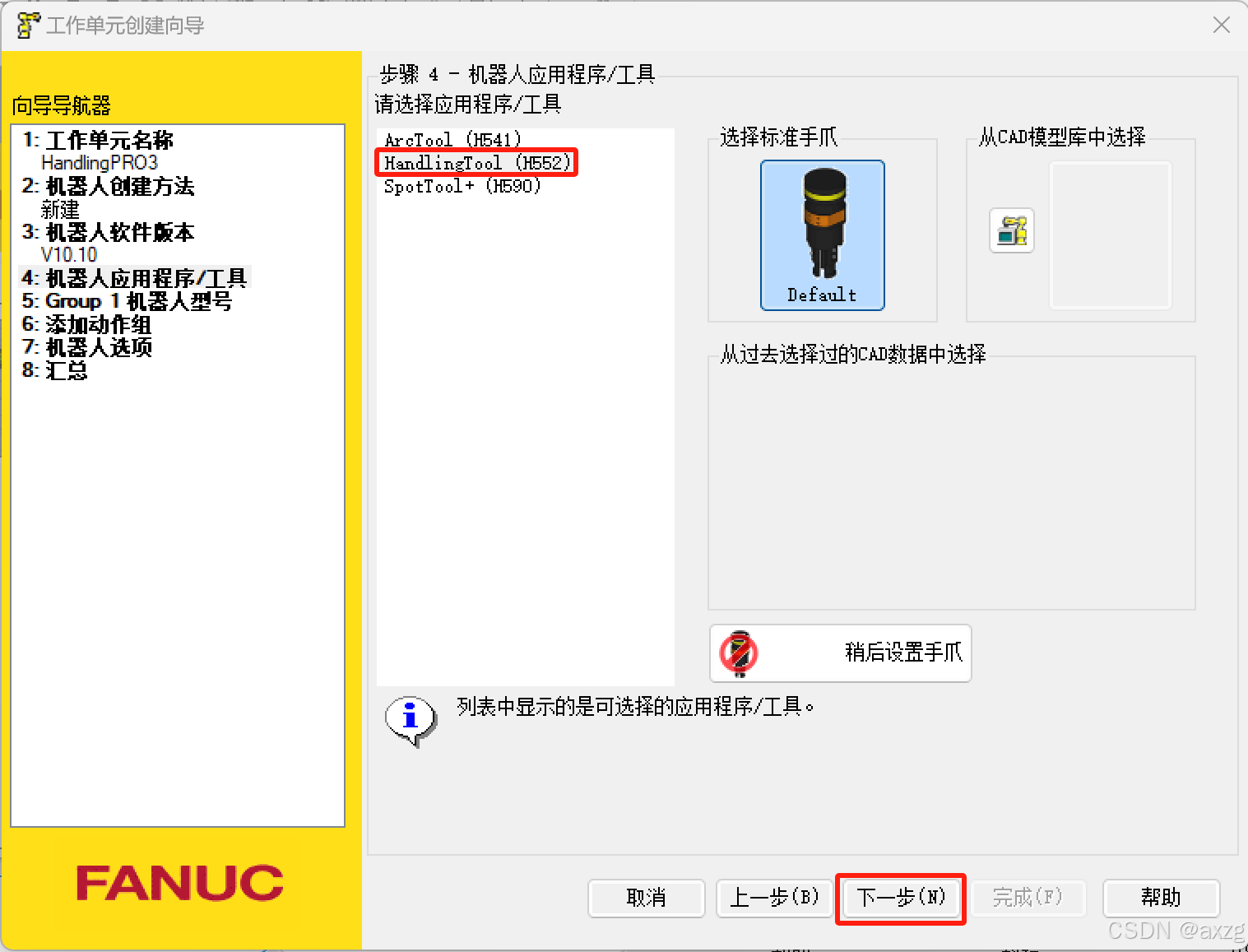
6.机器人应用程序
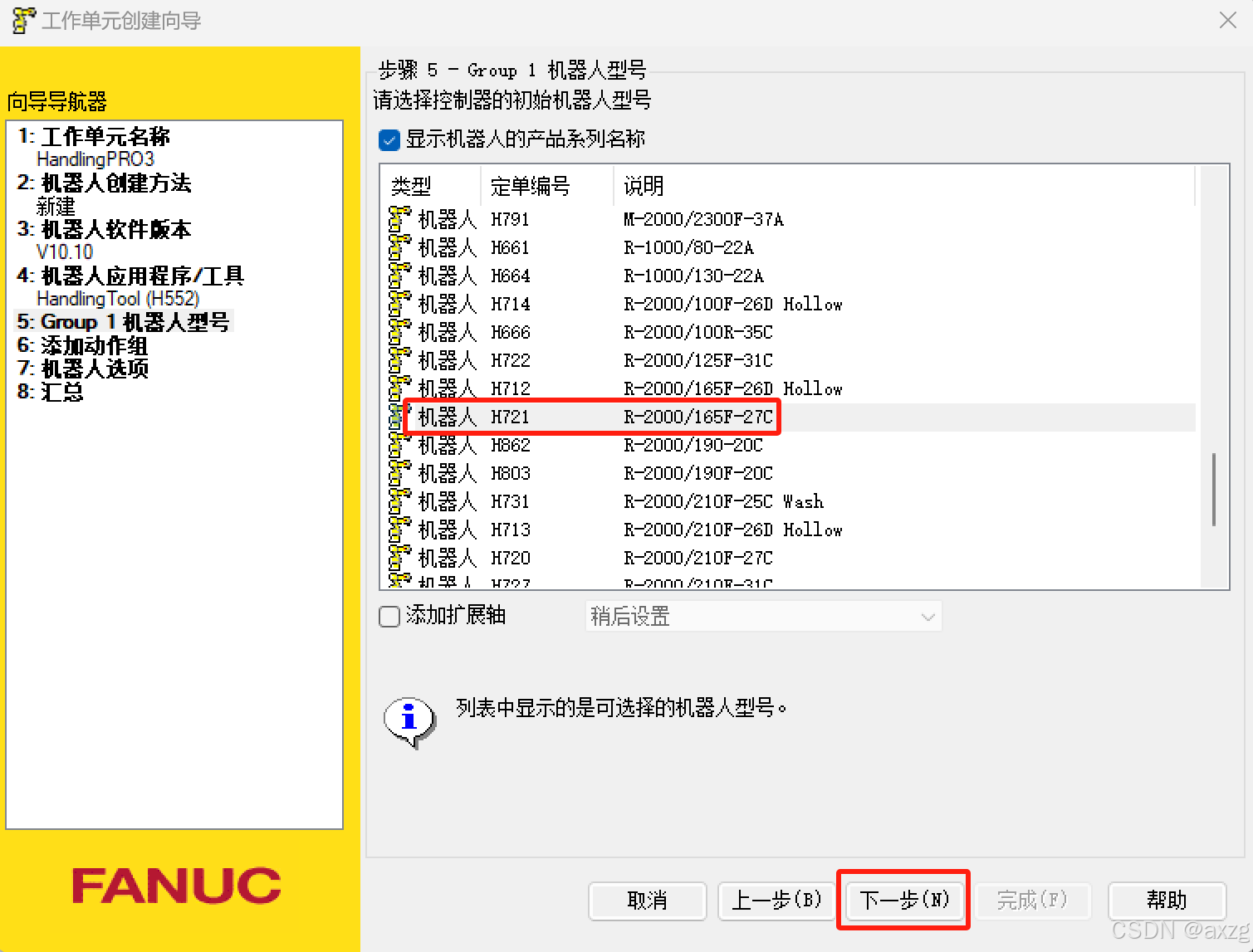
7.机器人型号
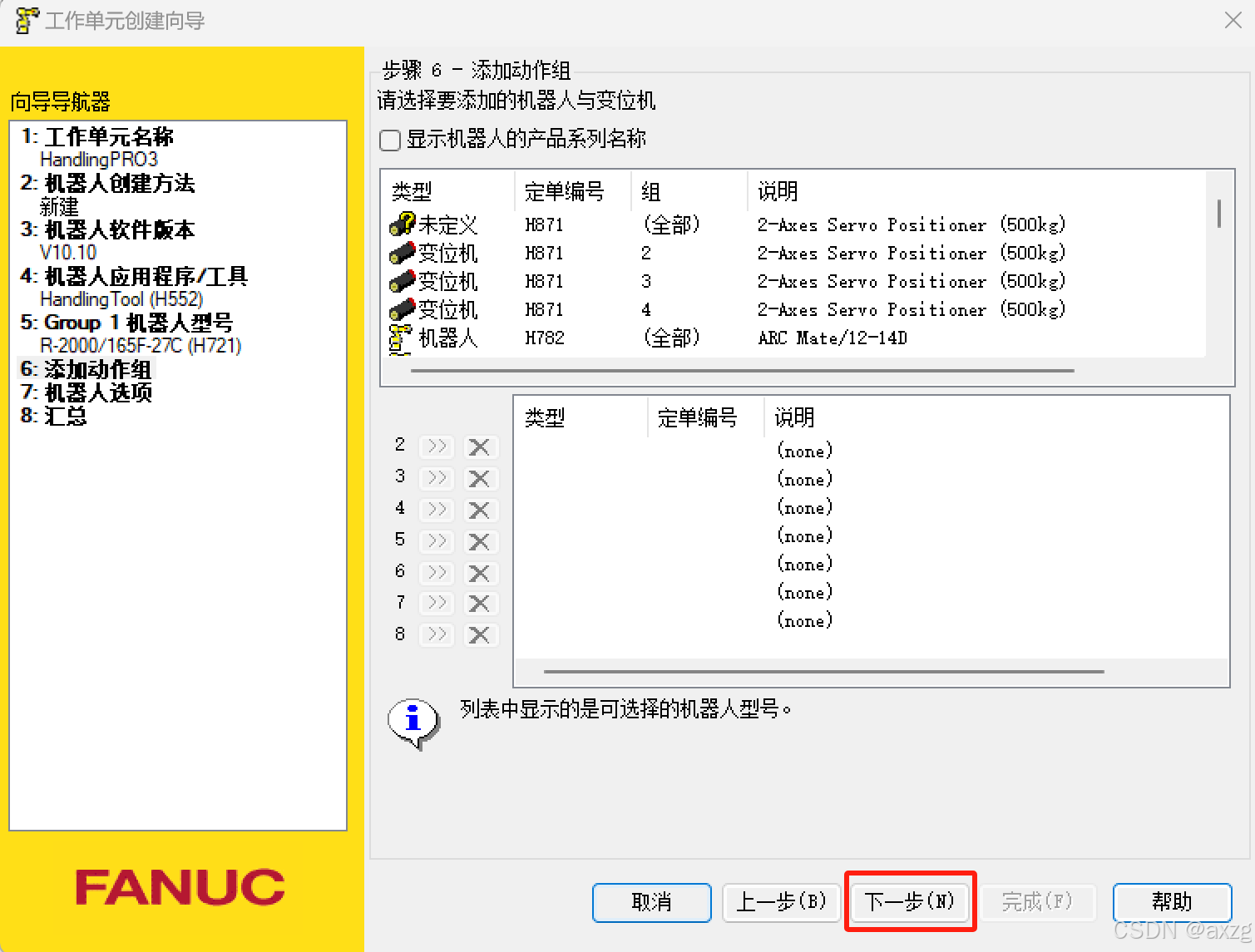
8.添加动作组
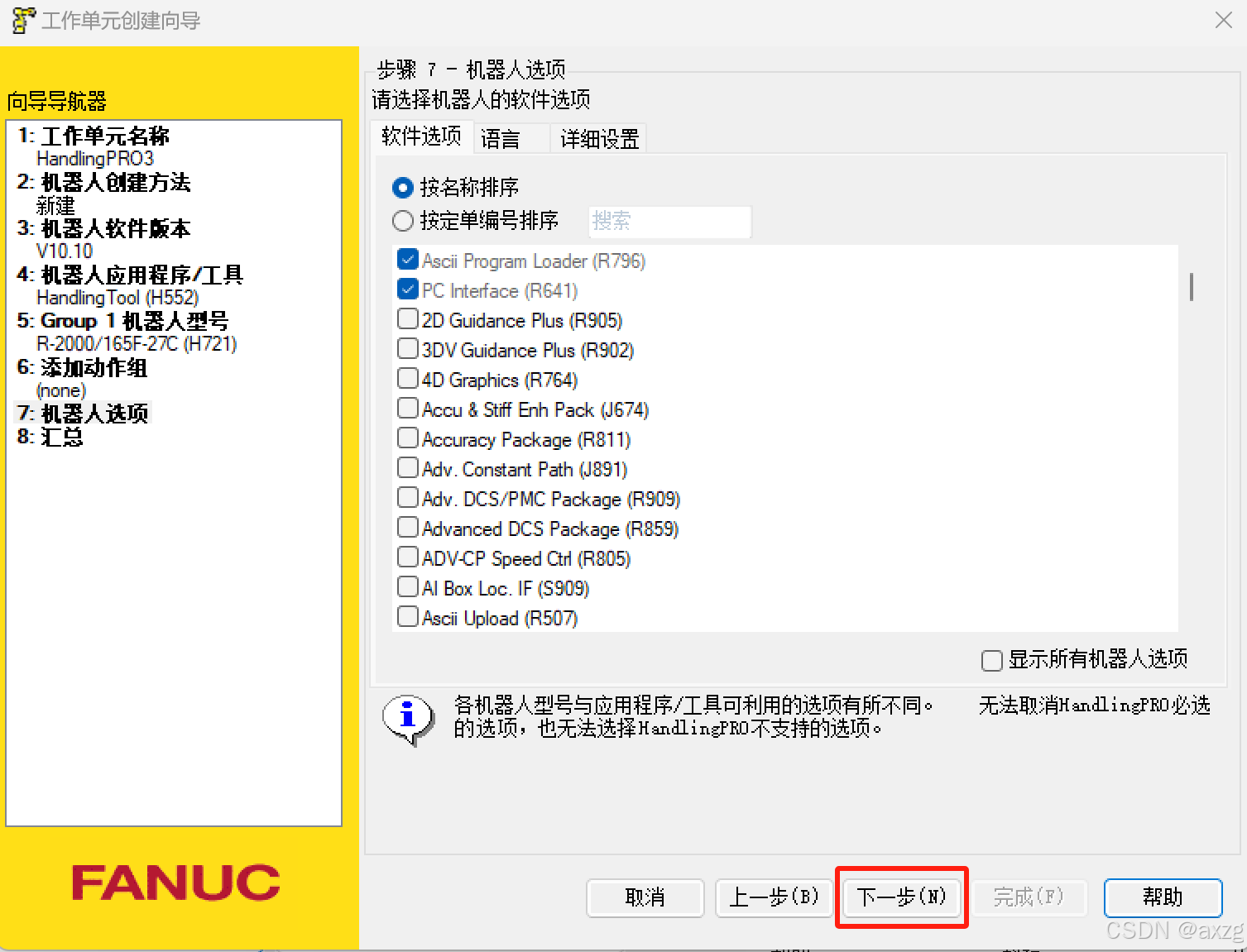
9.机器人选项
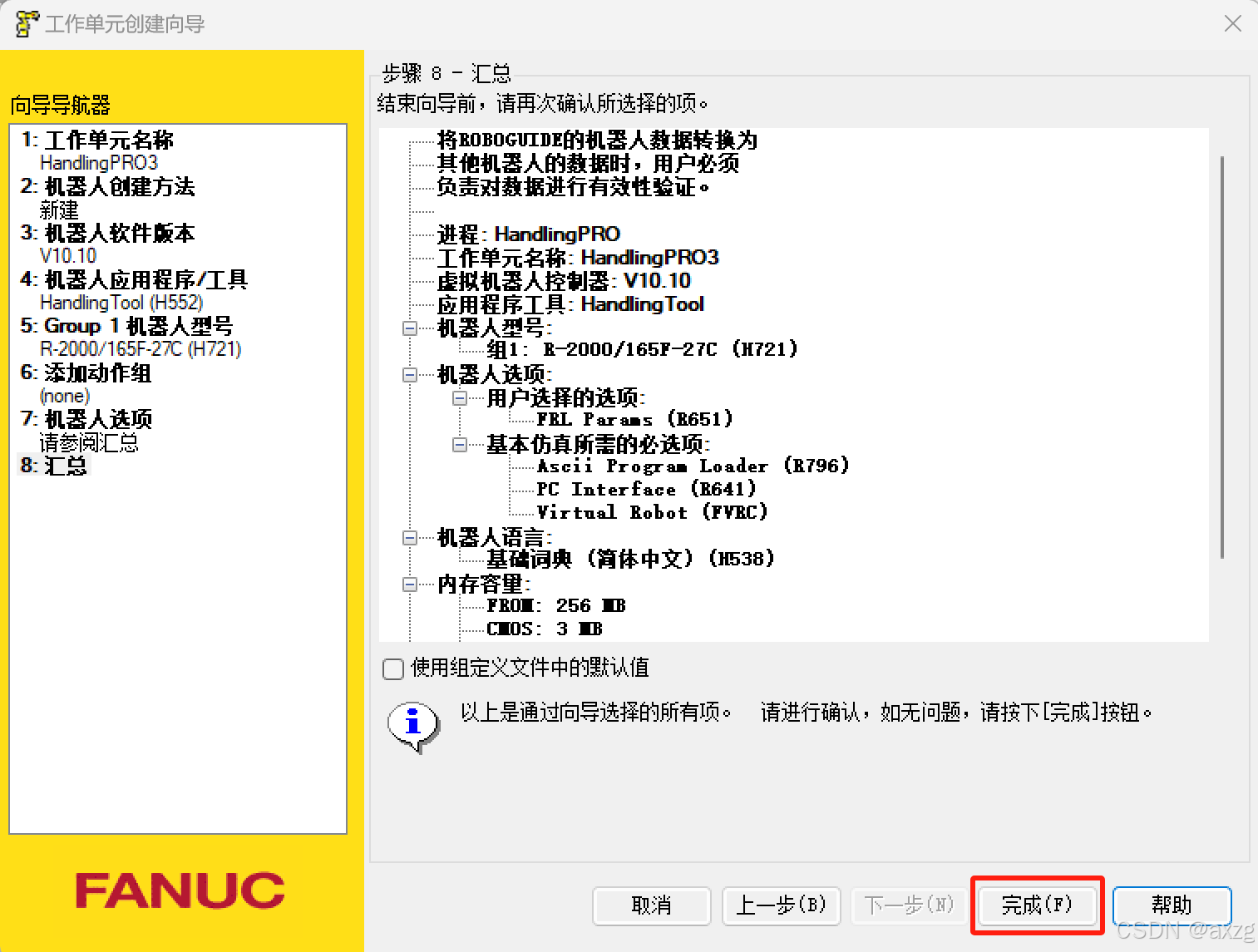
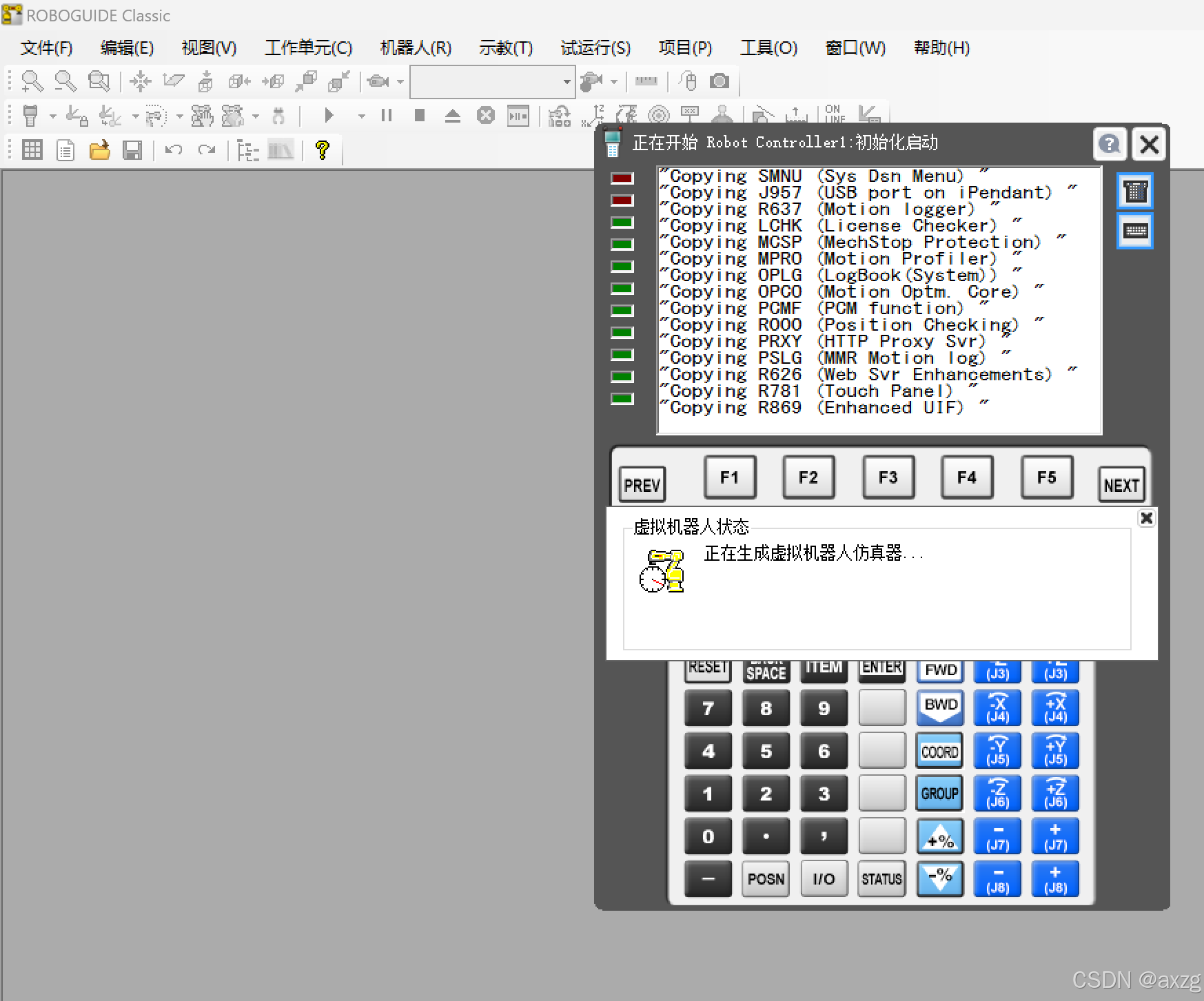
10.汇总完成
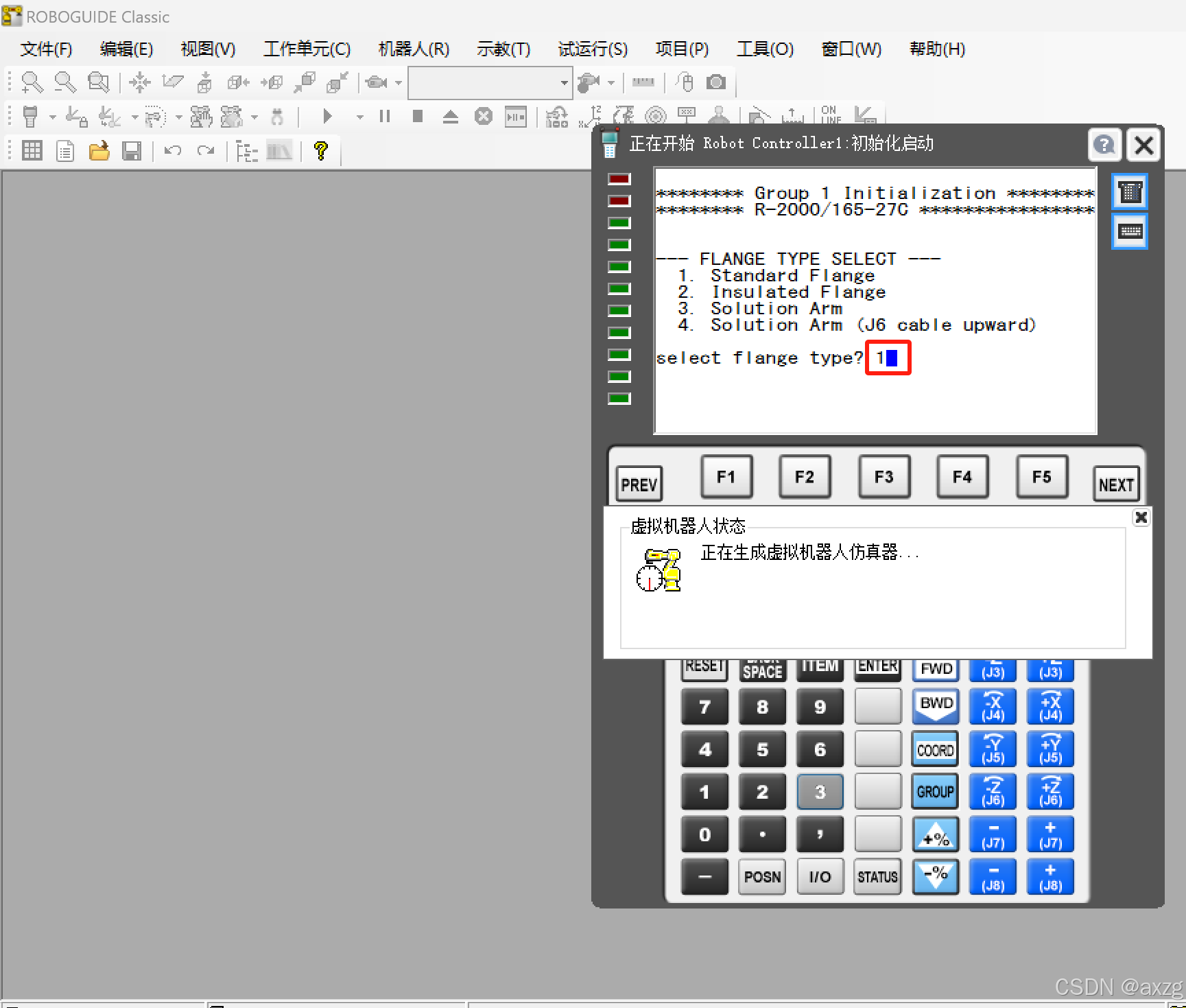
11.选择法兰类型
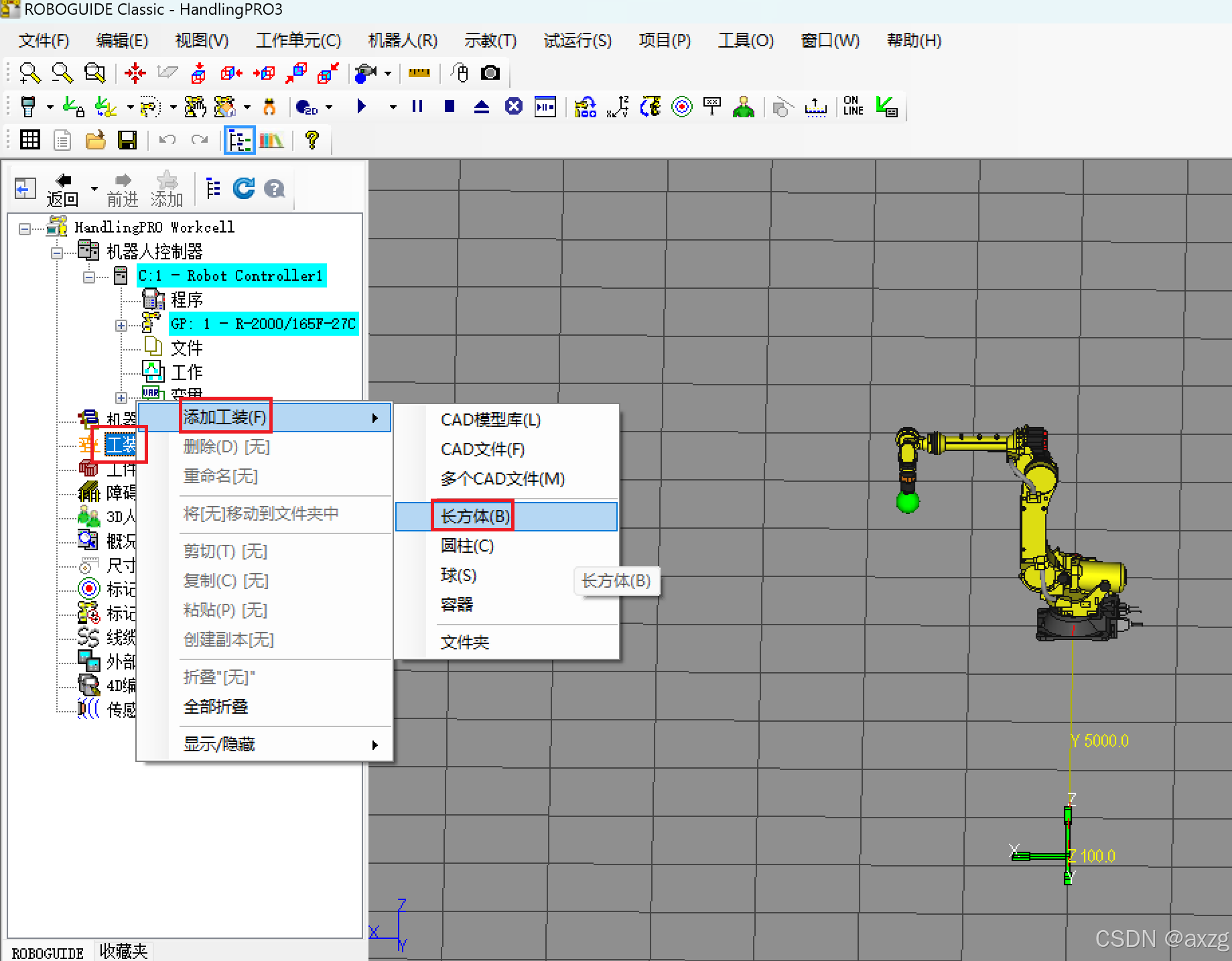
二、添加工装
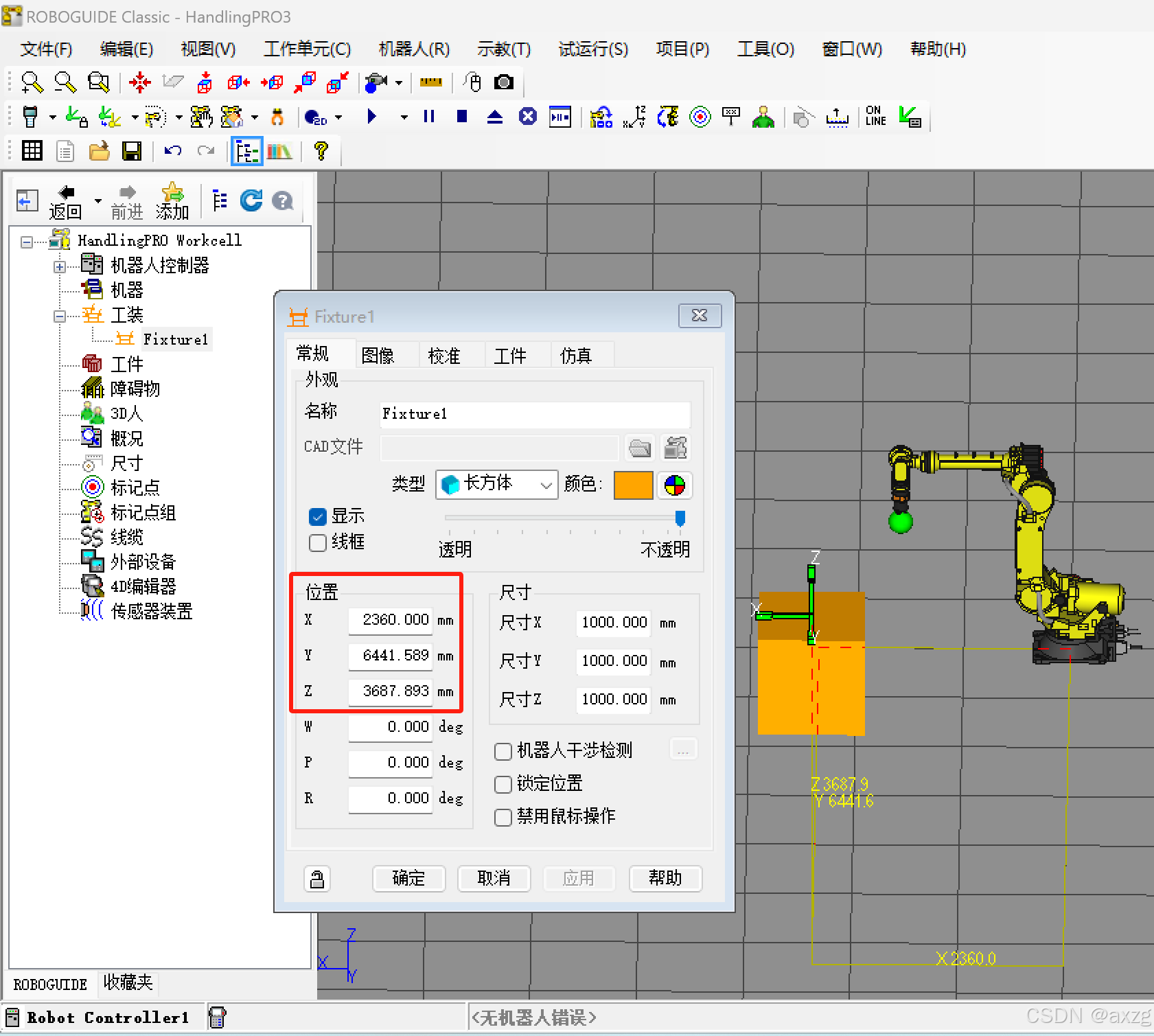
1.长方体工装
2.调整工装位置
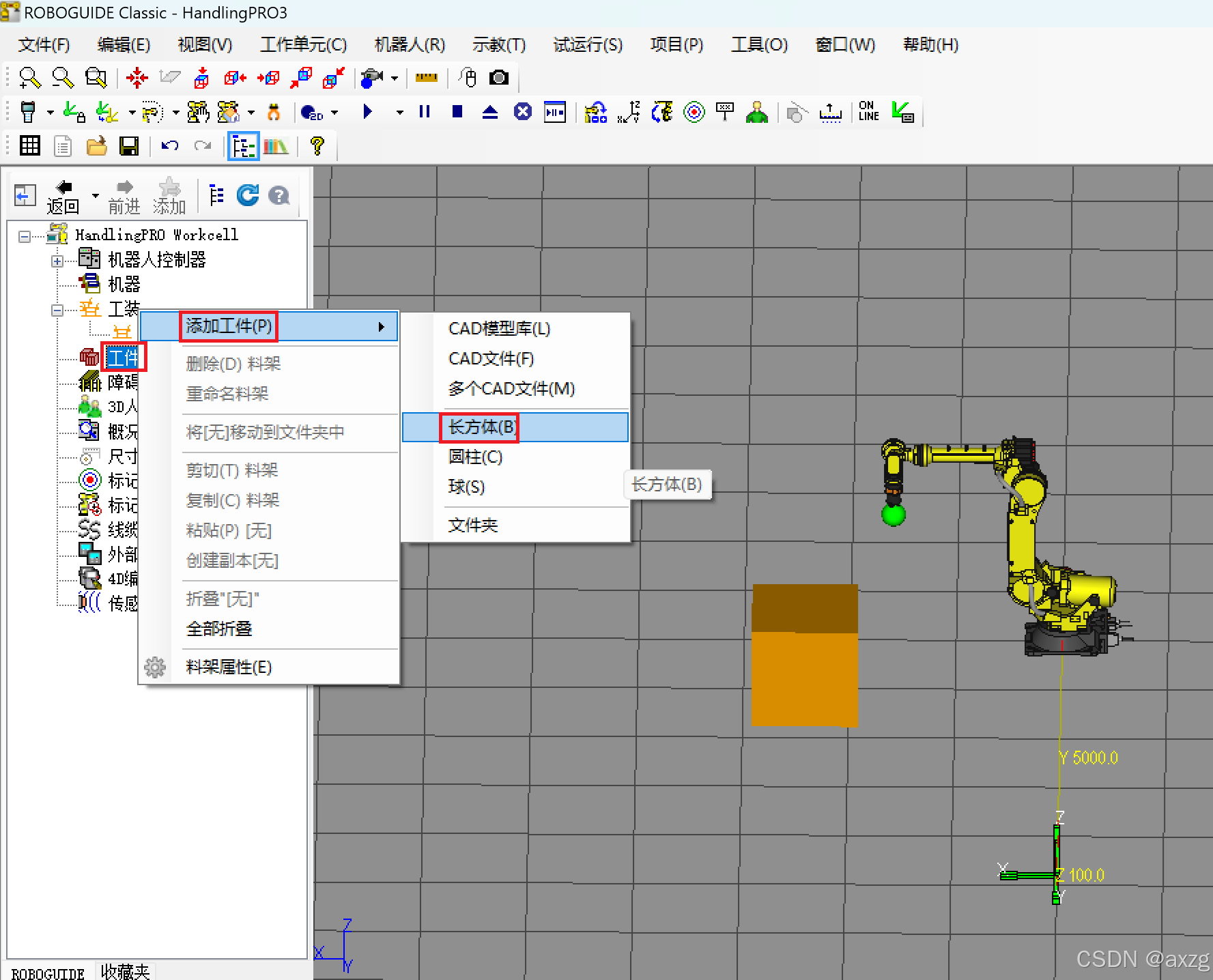
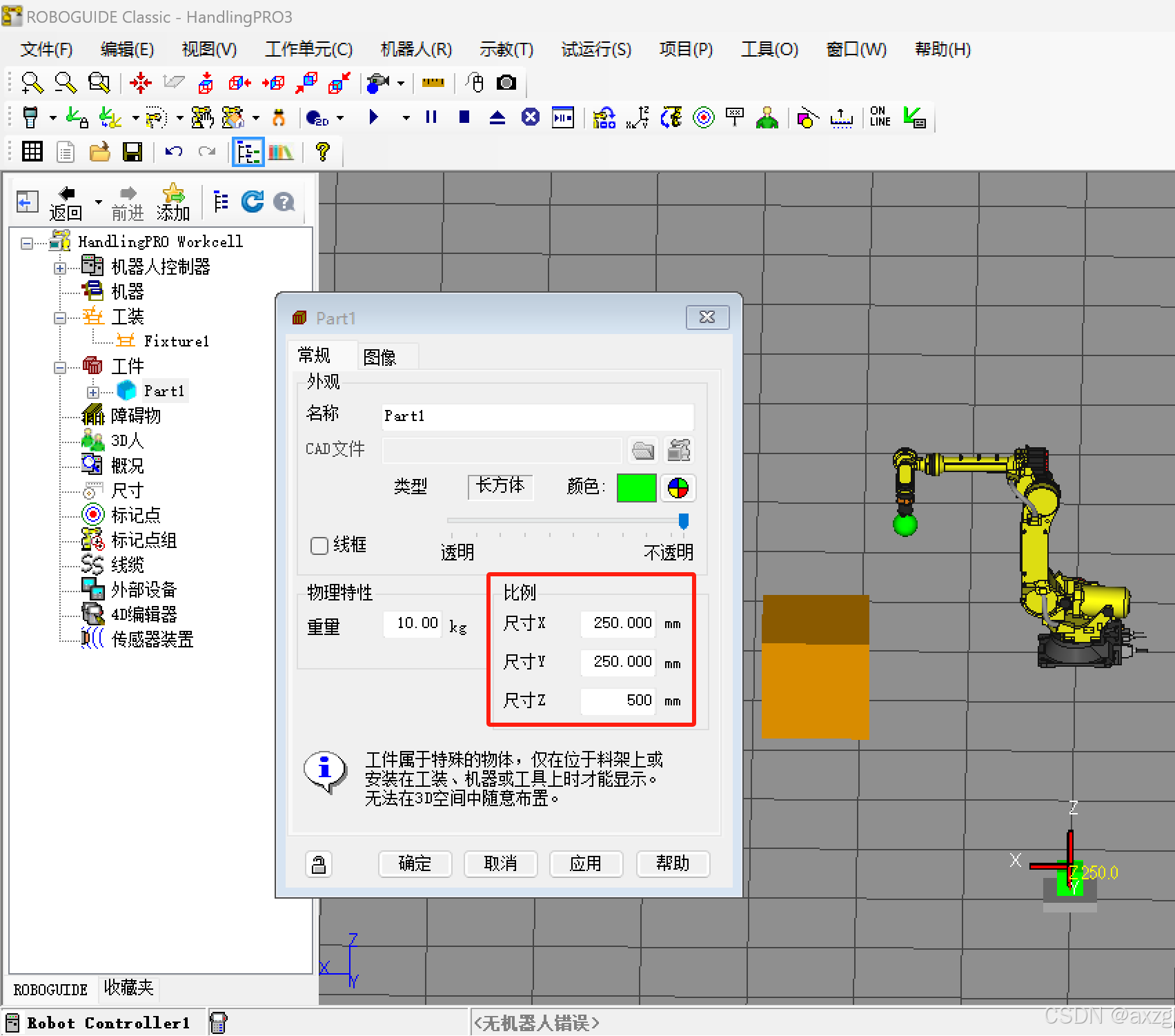
三、添加工件
1.长方体工件
1.调整工件尺寸
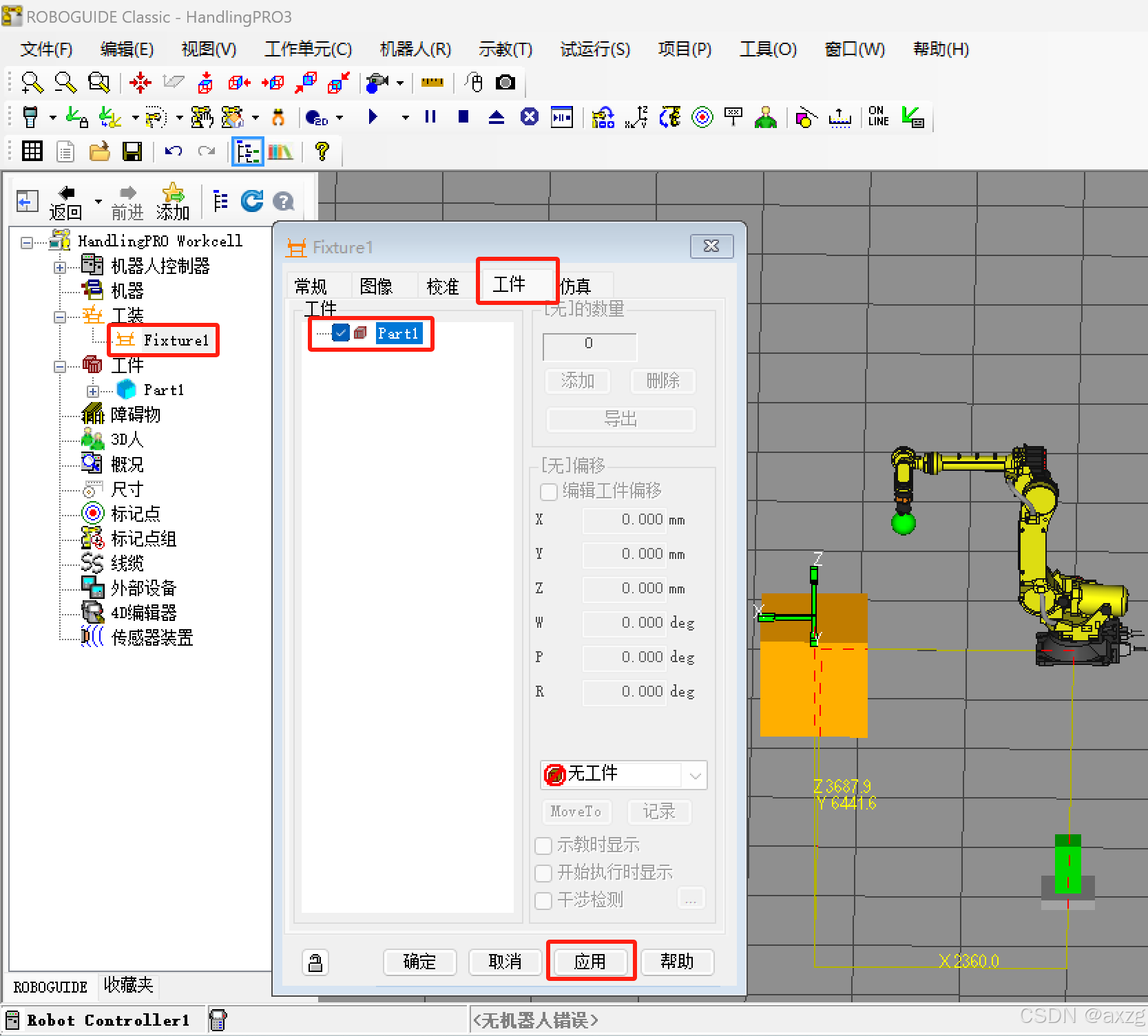
四、关联工装与工件
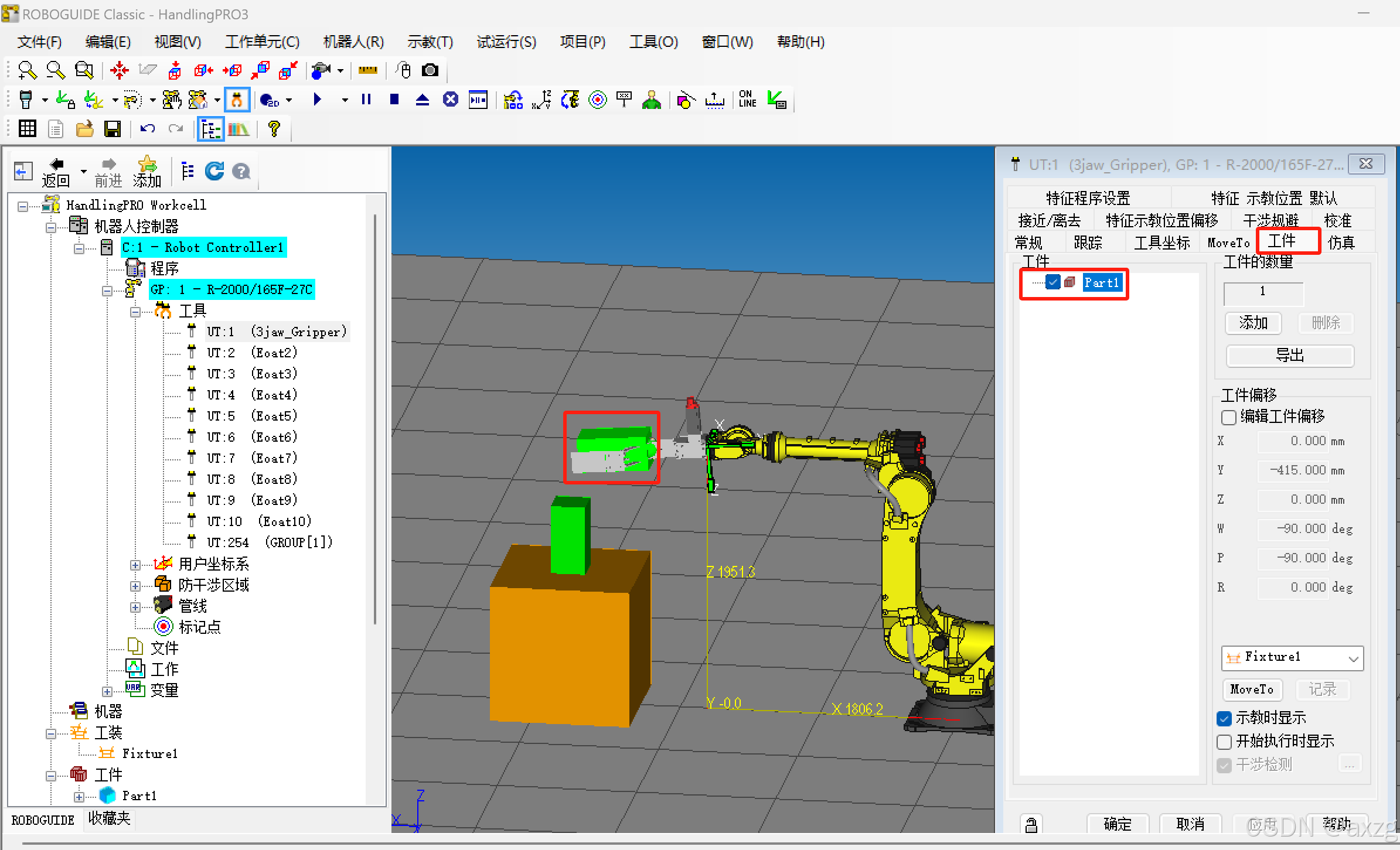
1.关联工件
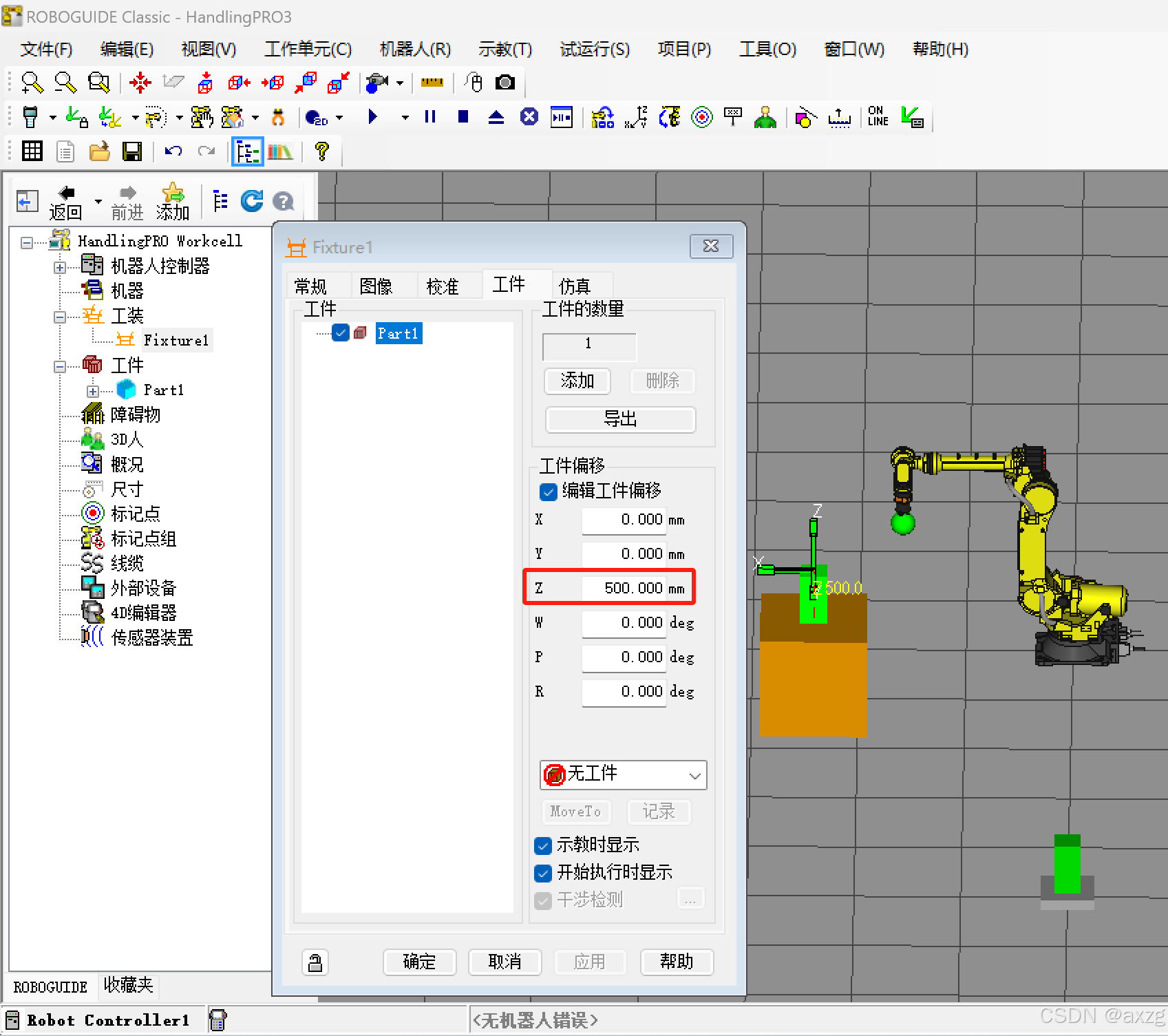
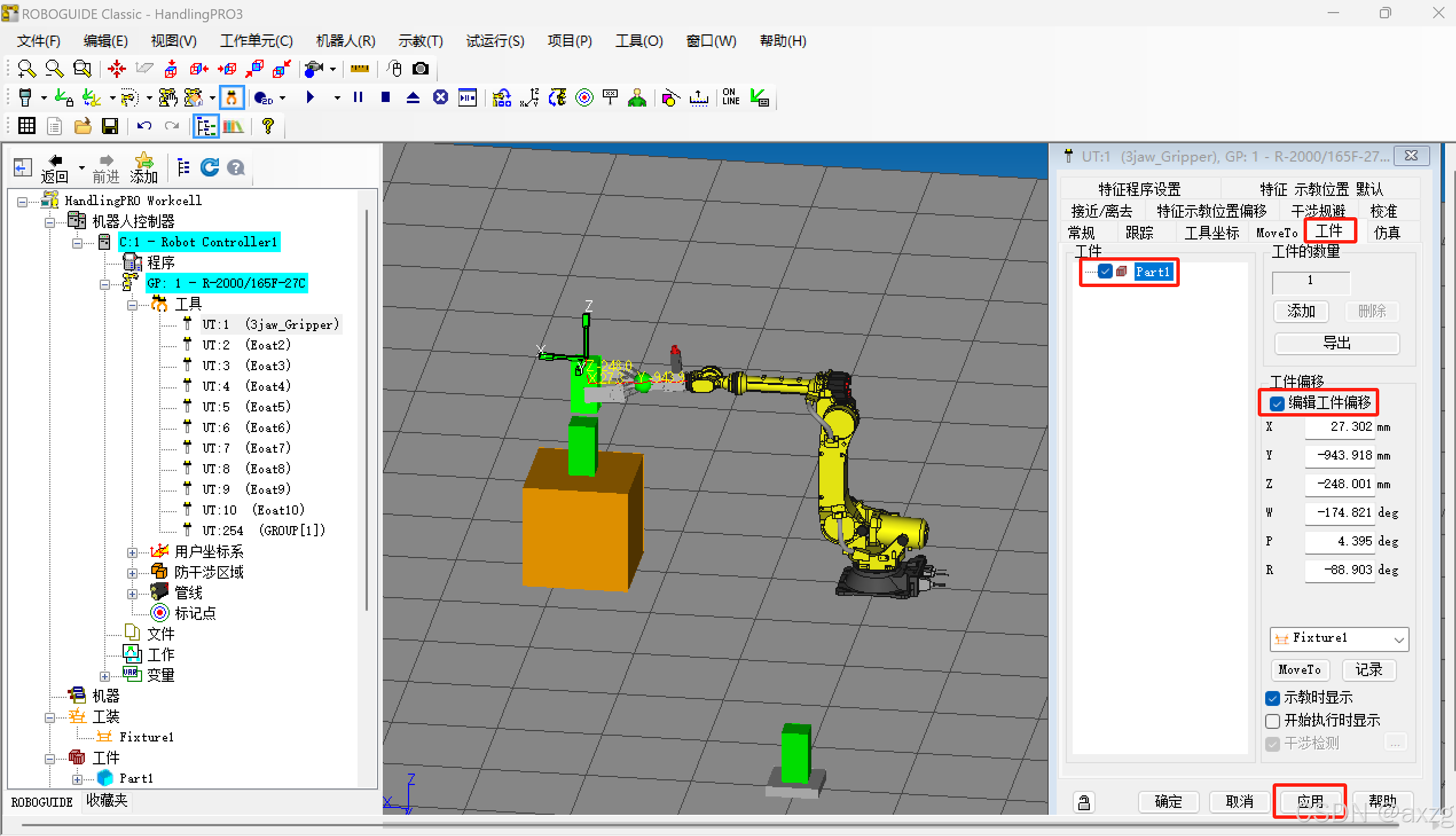
2.调整零件位置
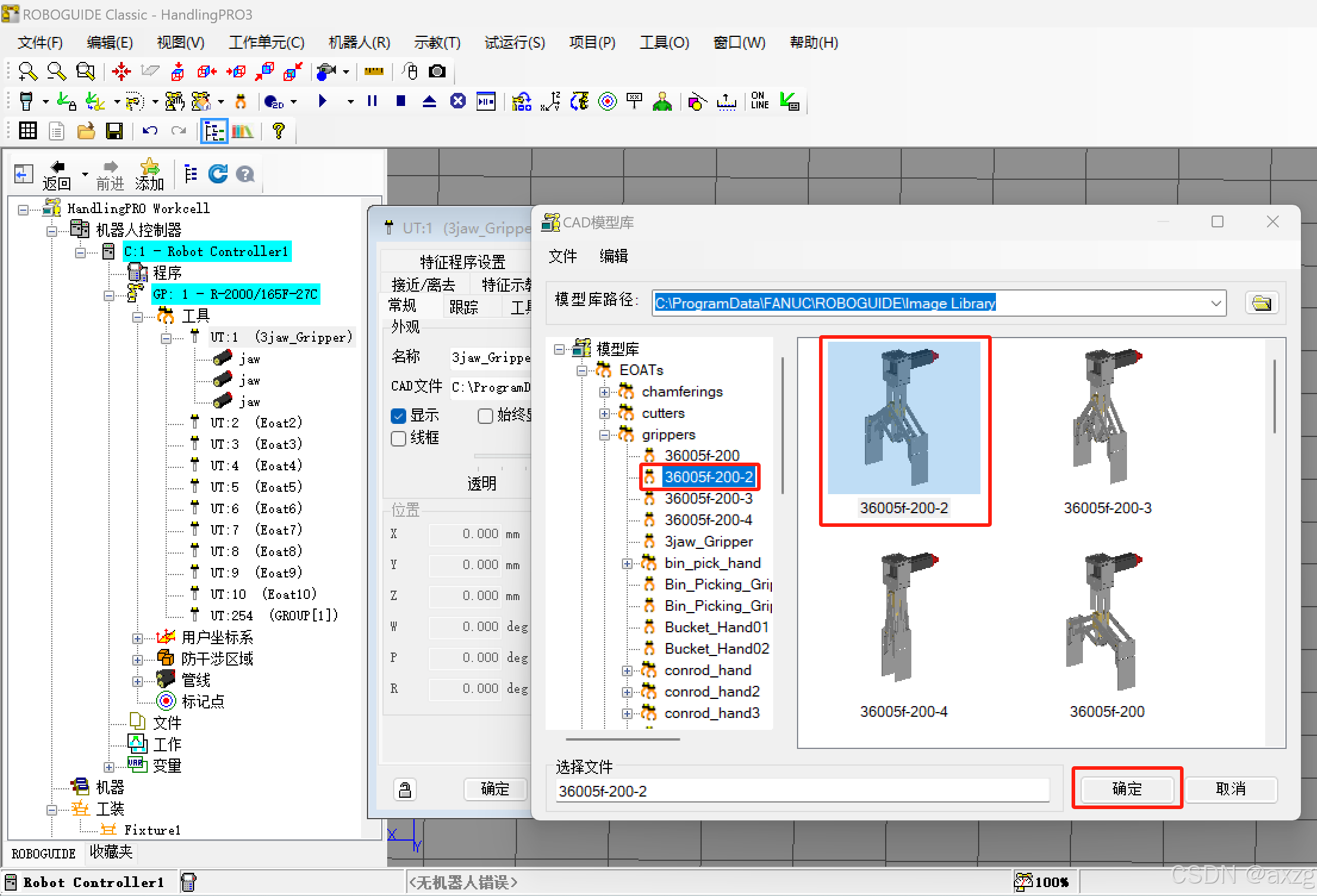
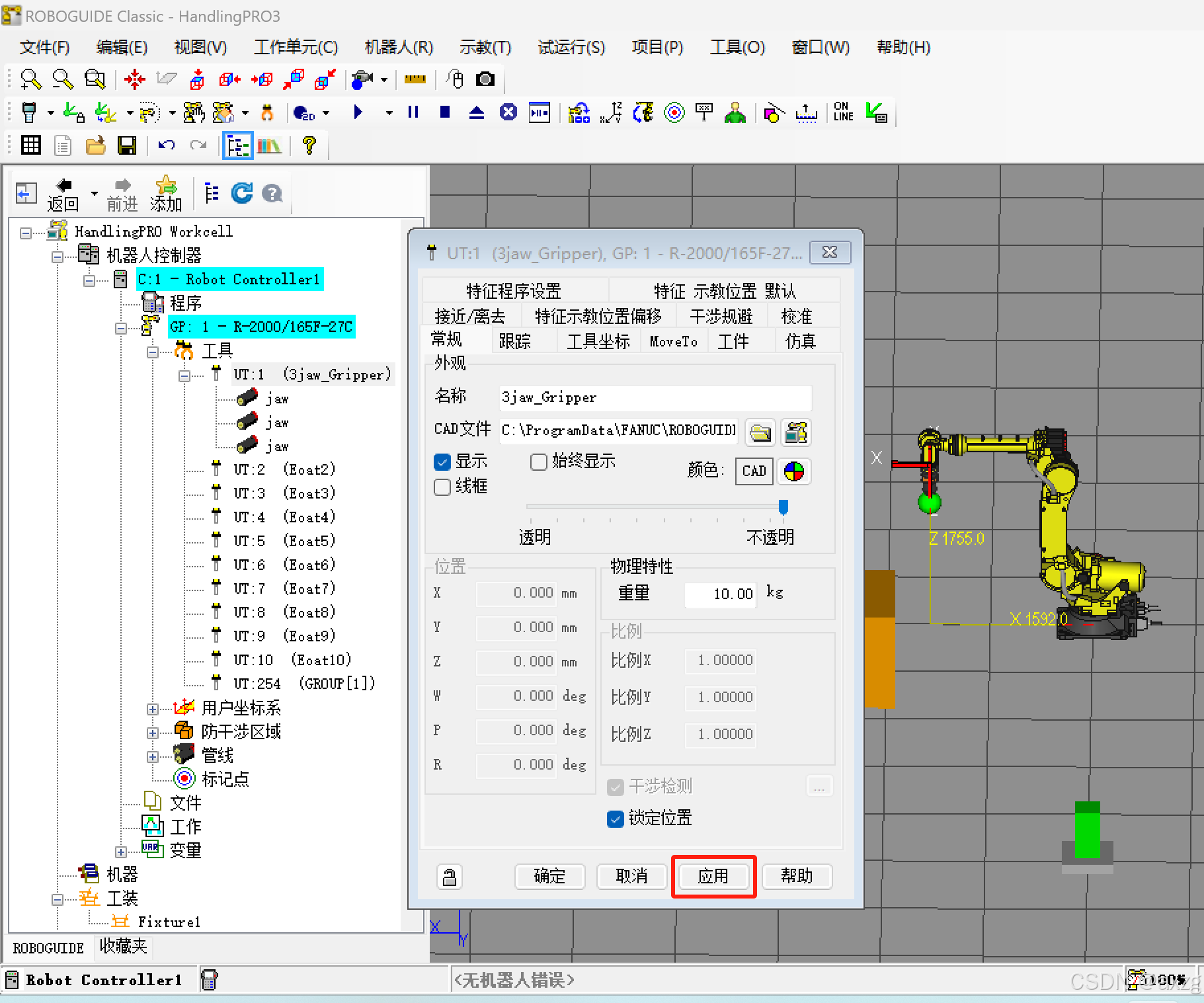
五、安装手爪
1.选择文件路径
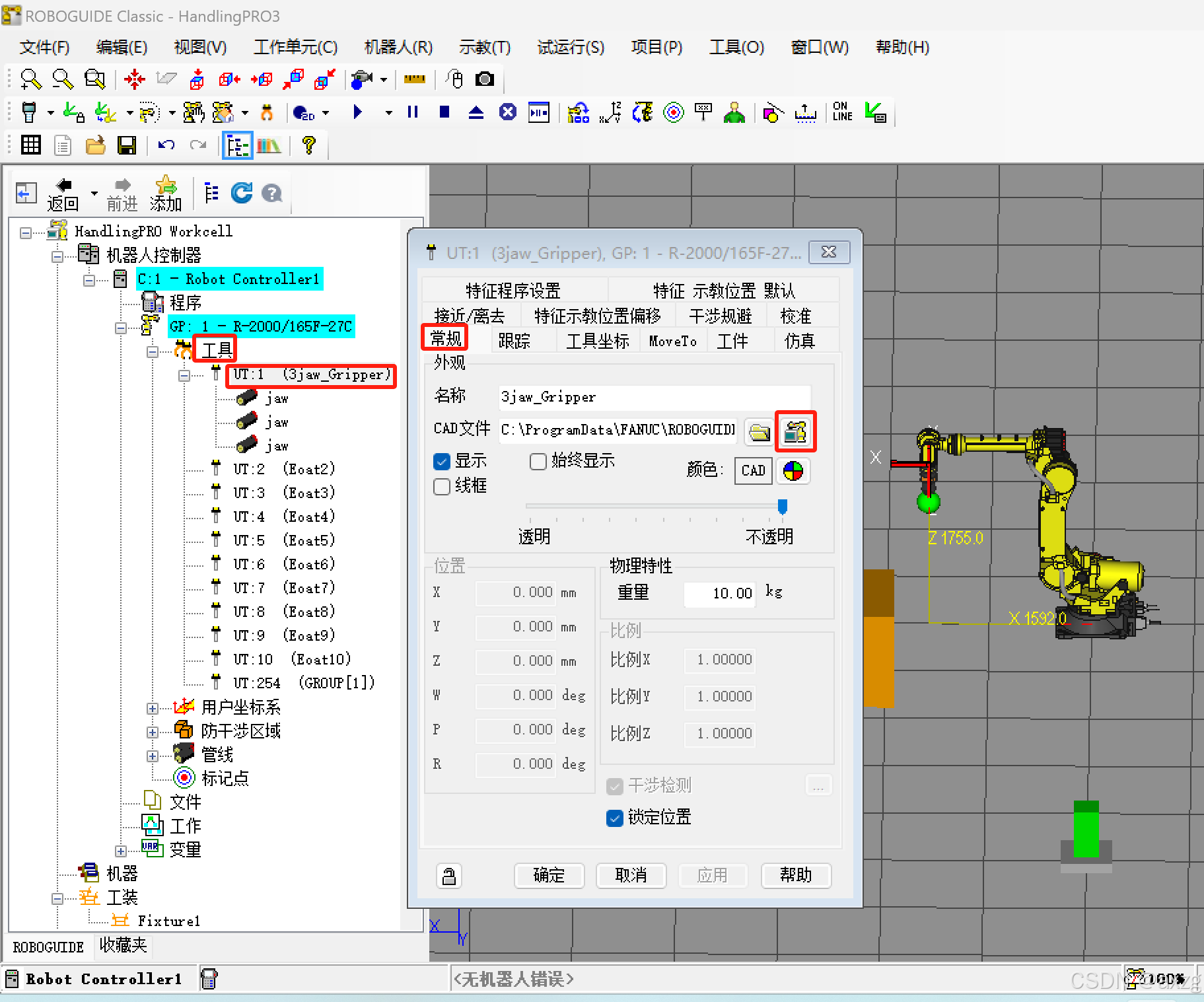
2.选择手爪类型
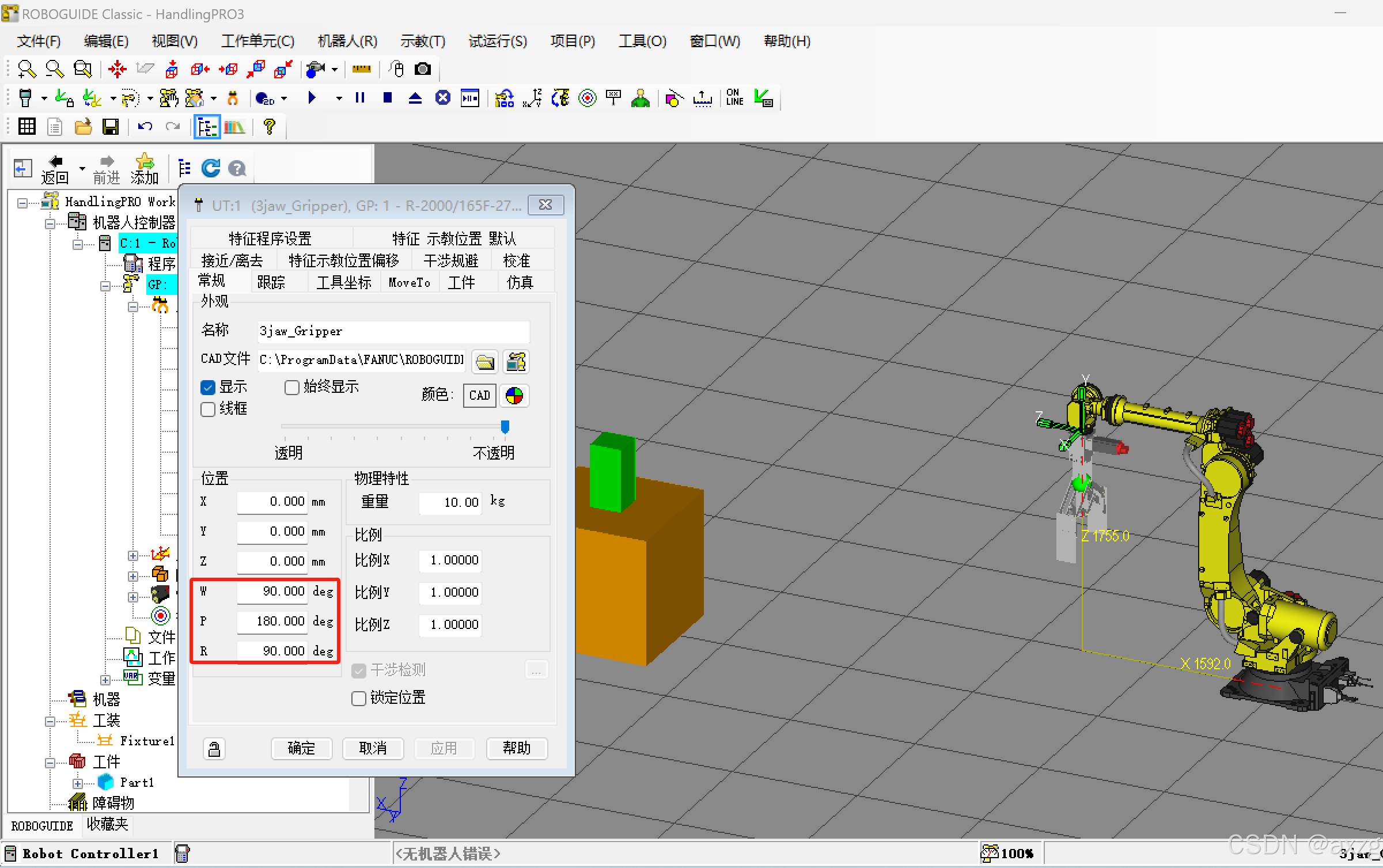
3.调整手爪姿态

可以重新拖动工装到合适位置
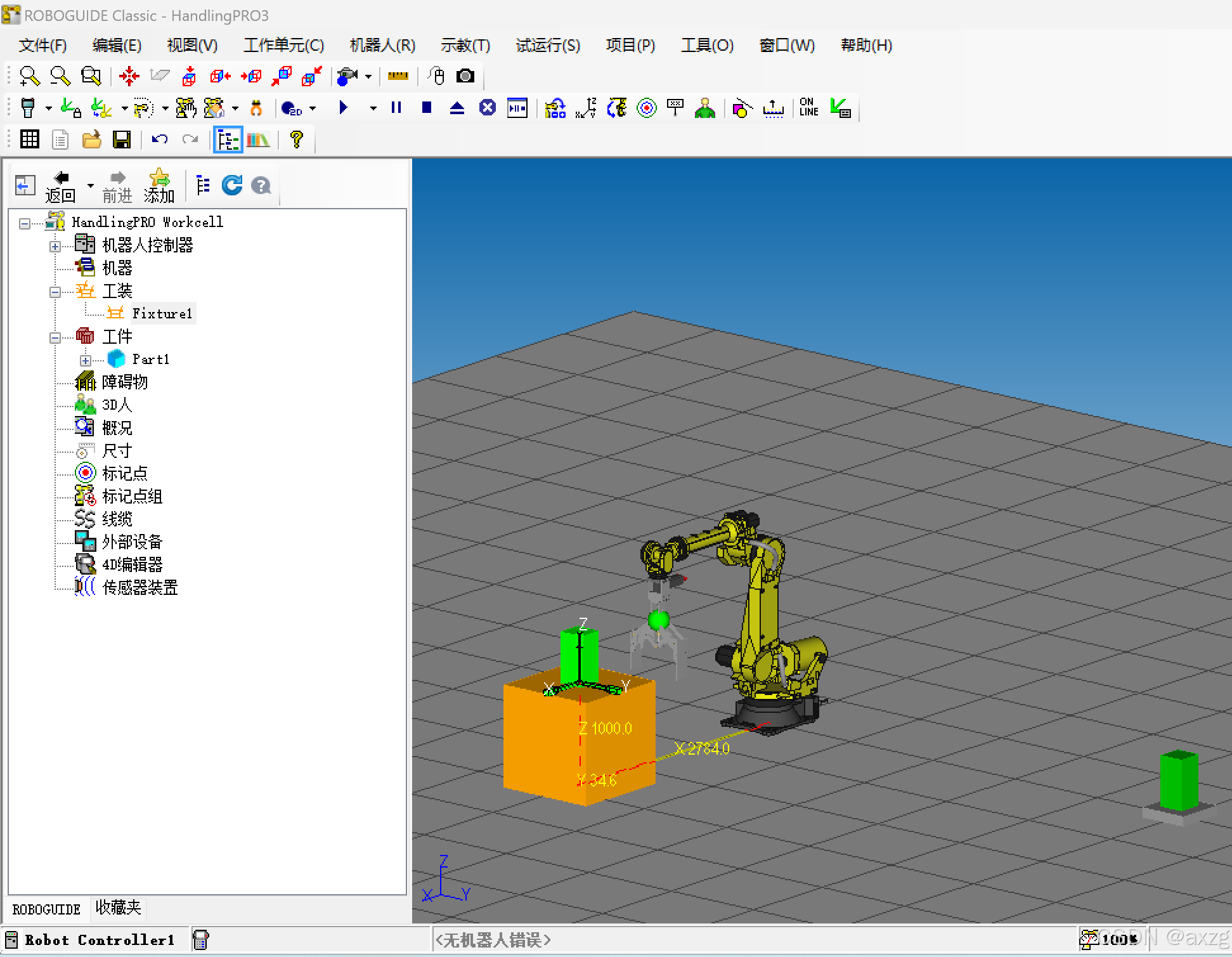
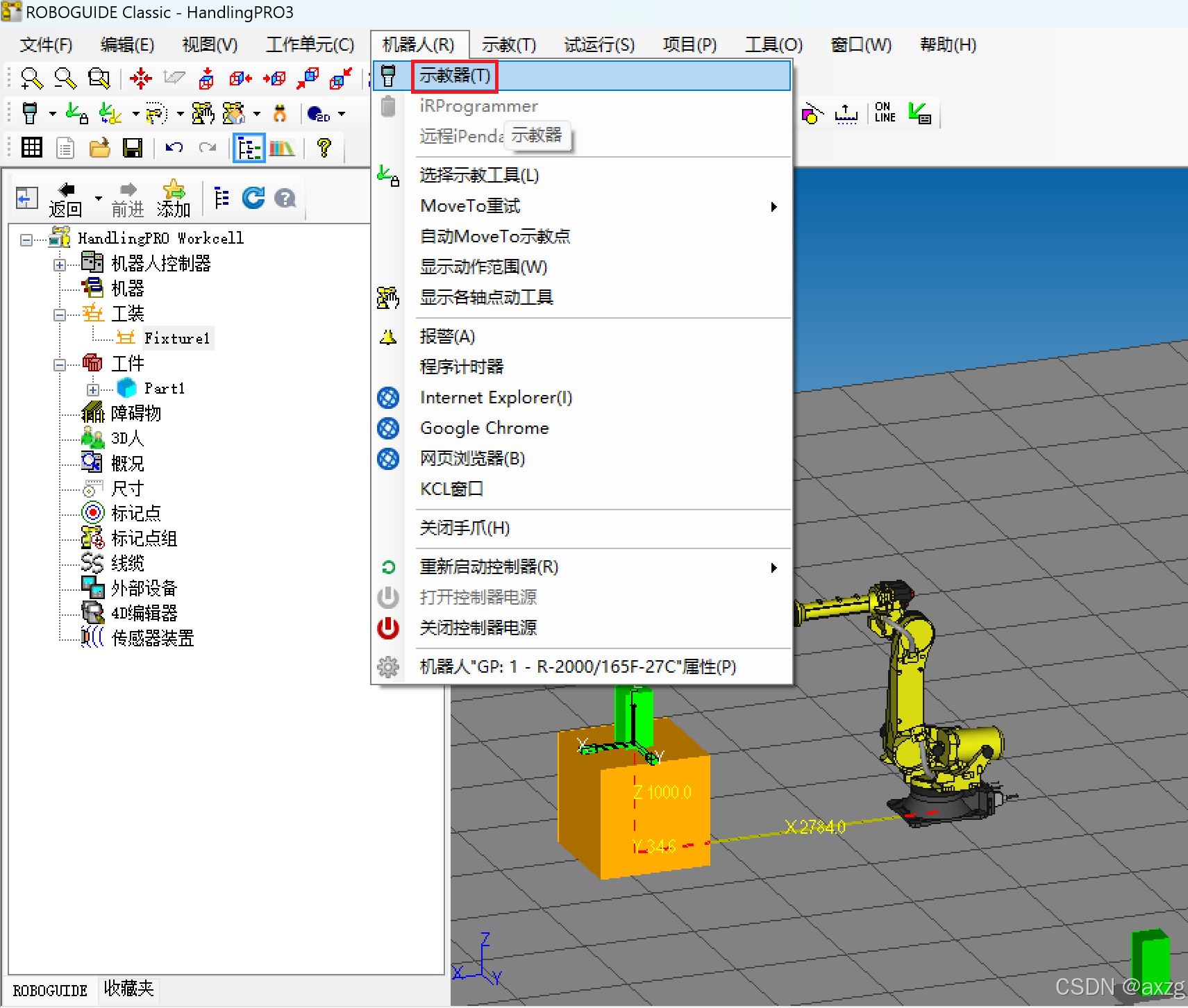
通过示教器可以调整机器人位置
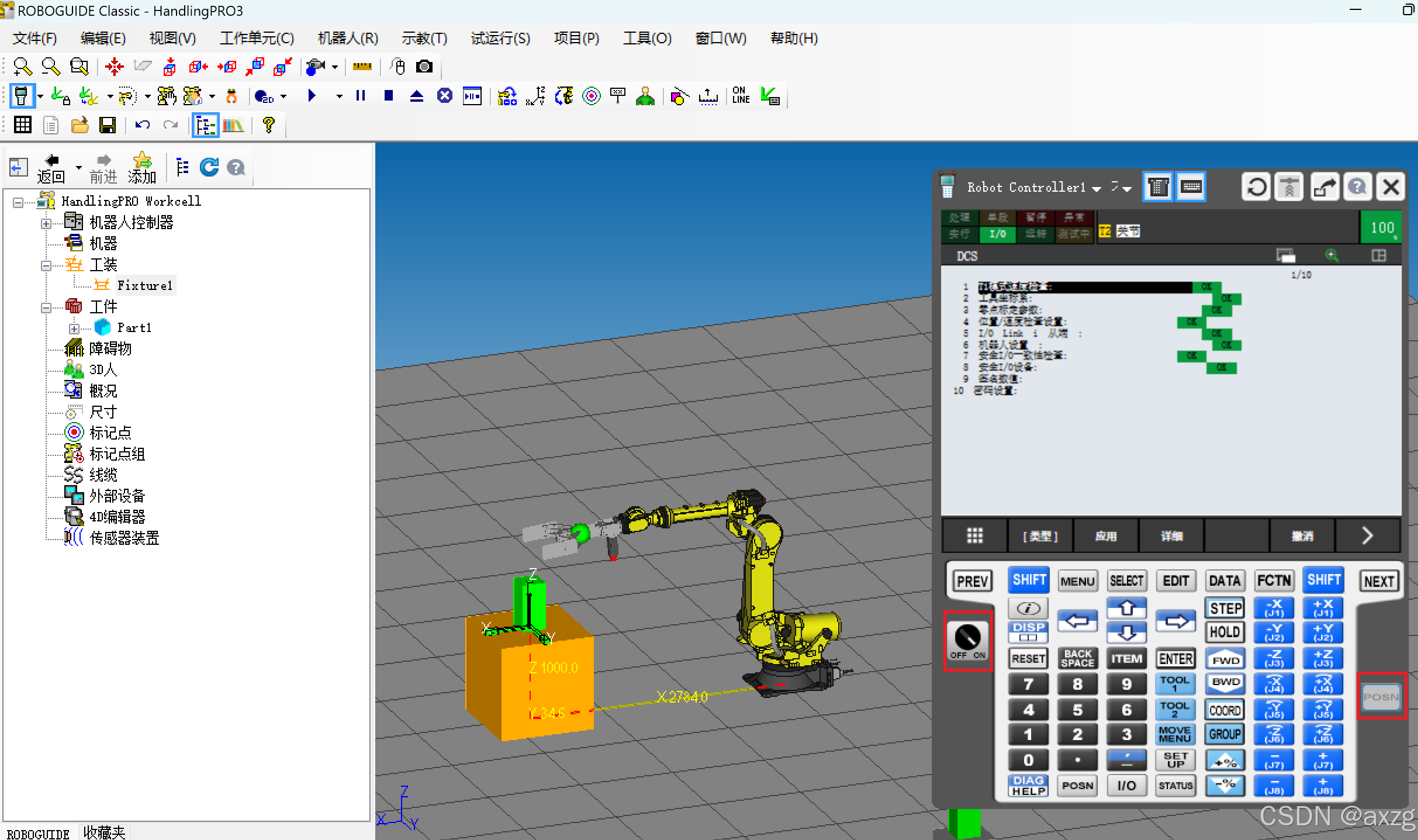
调整机器人各关节初始角度,也可以避开奇异点位置

六、关联手爪与工件
1.在手爪上安装零件
2.调节零件在手爪上的位置
调节零件在手爪上的位置
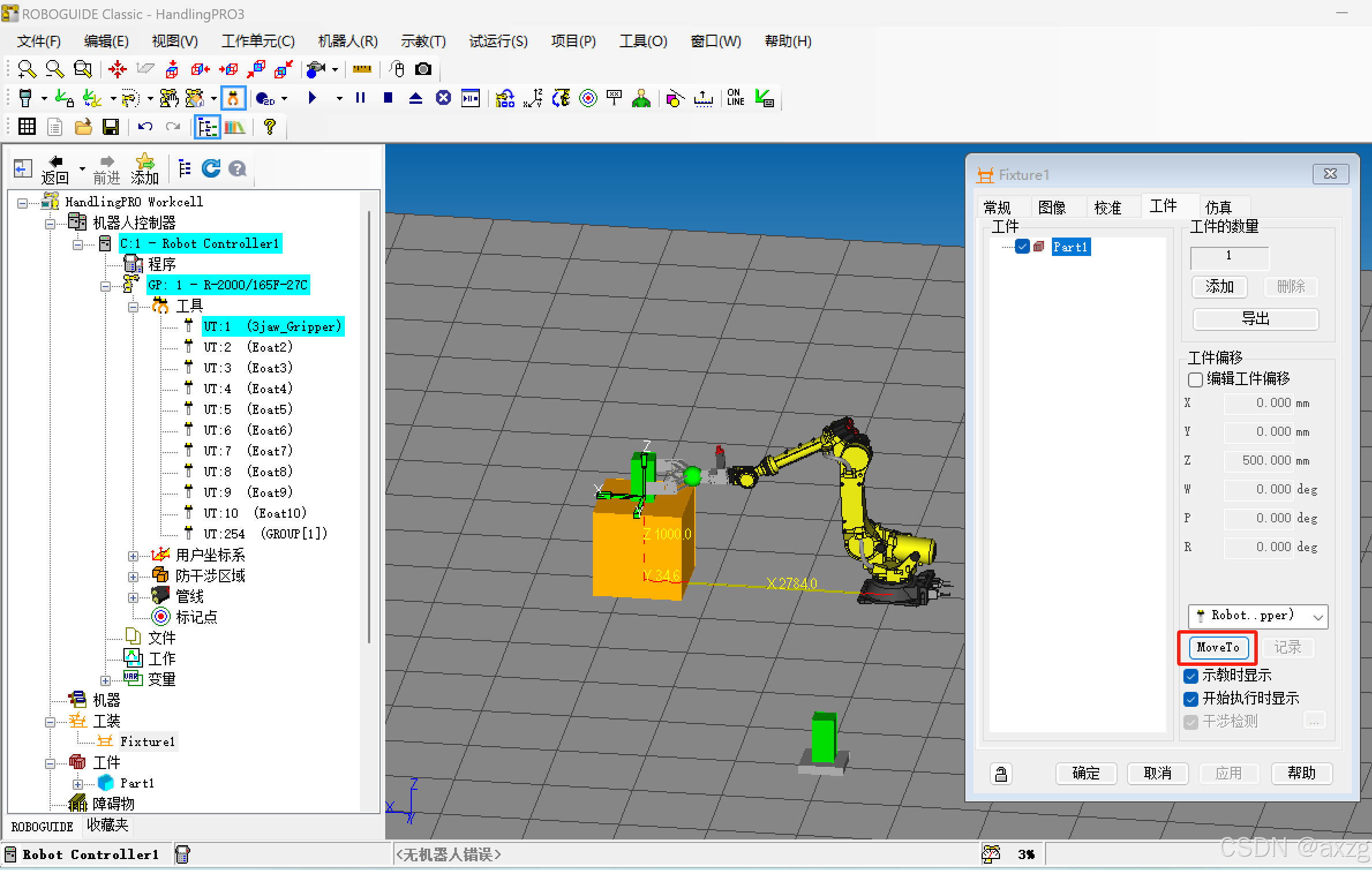
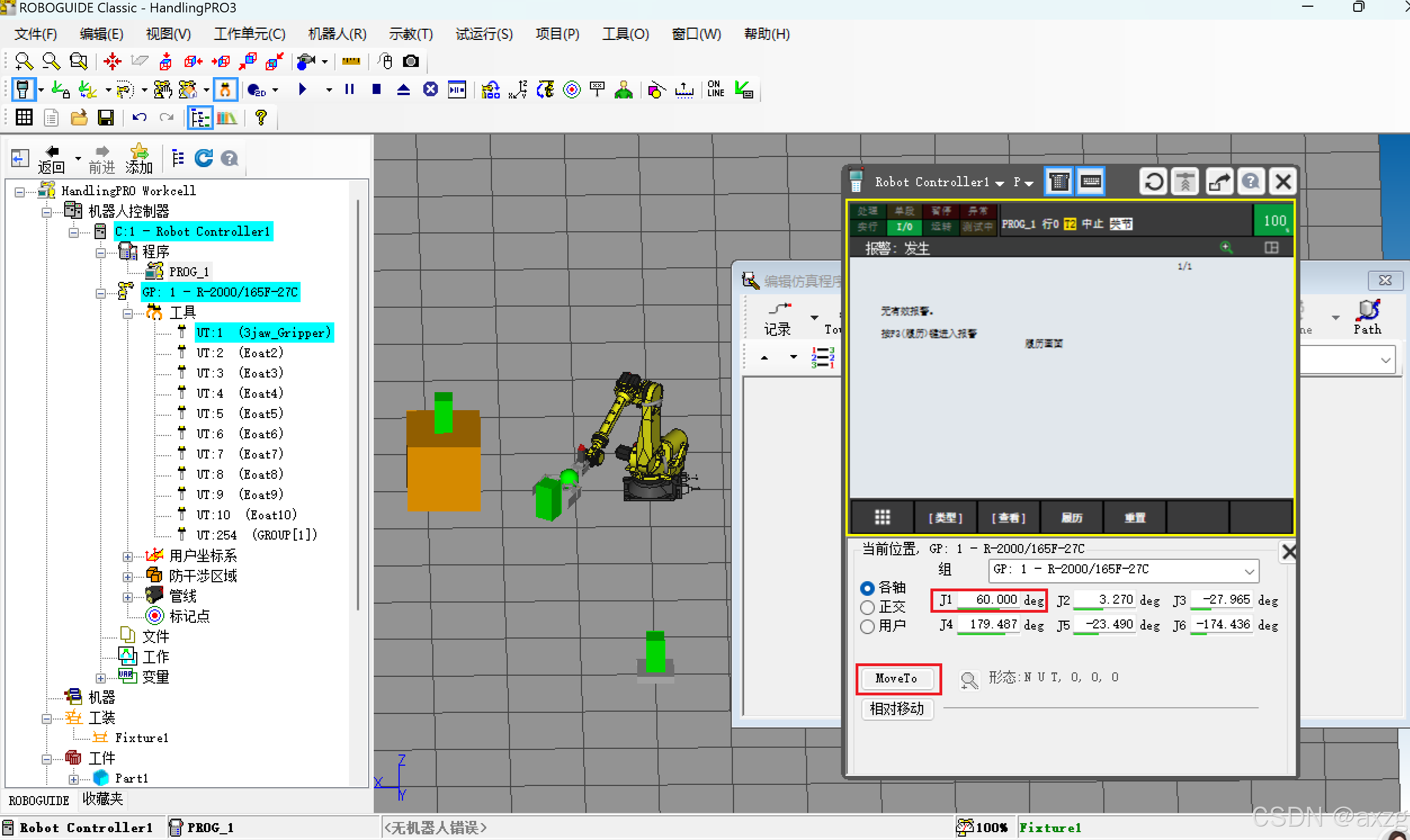
3.移动机器人到工作台上
调节零件在手爪上的位置双击工装,选择工件,点击MoveTo,移动机器人到工作台上
七、仿真
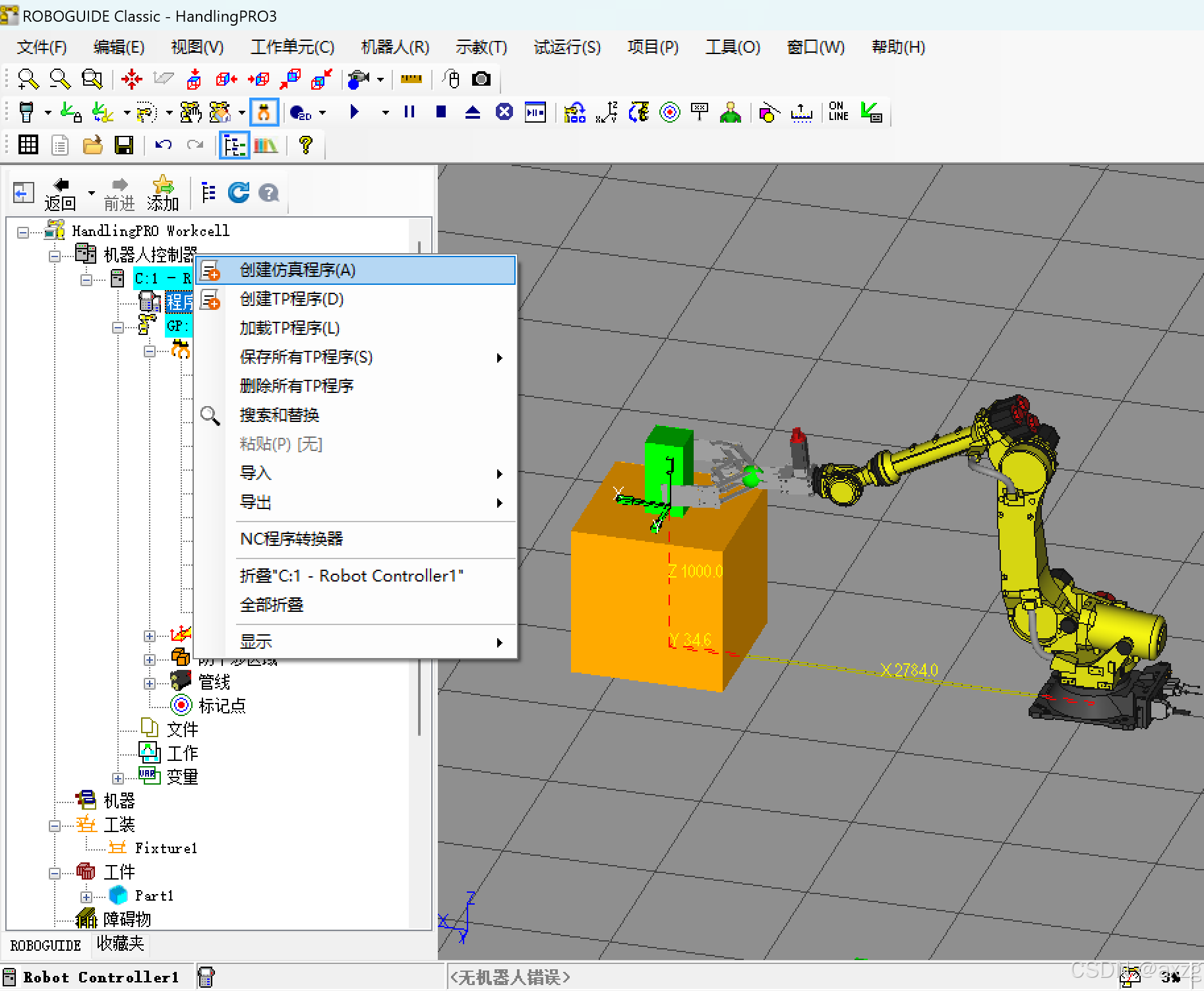
1.创建程序
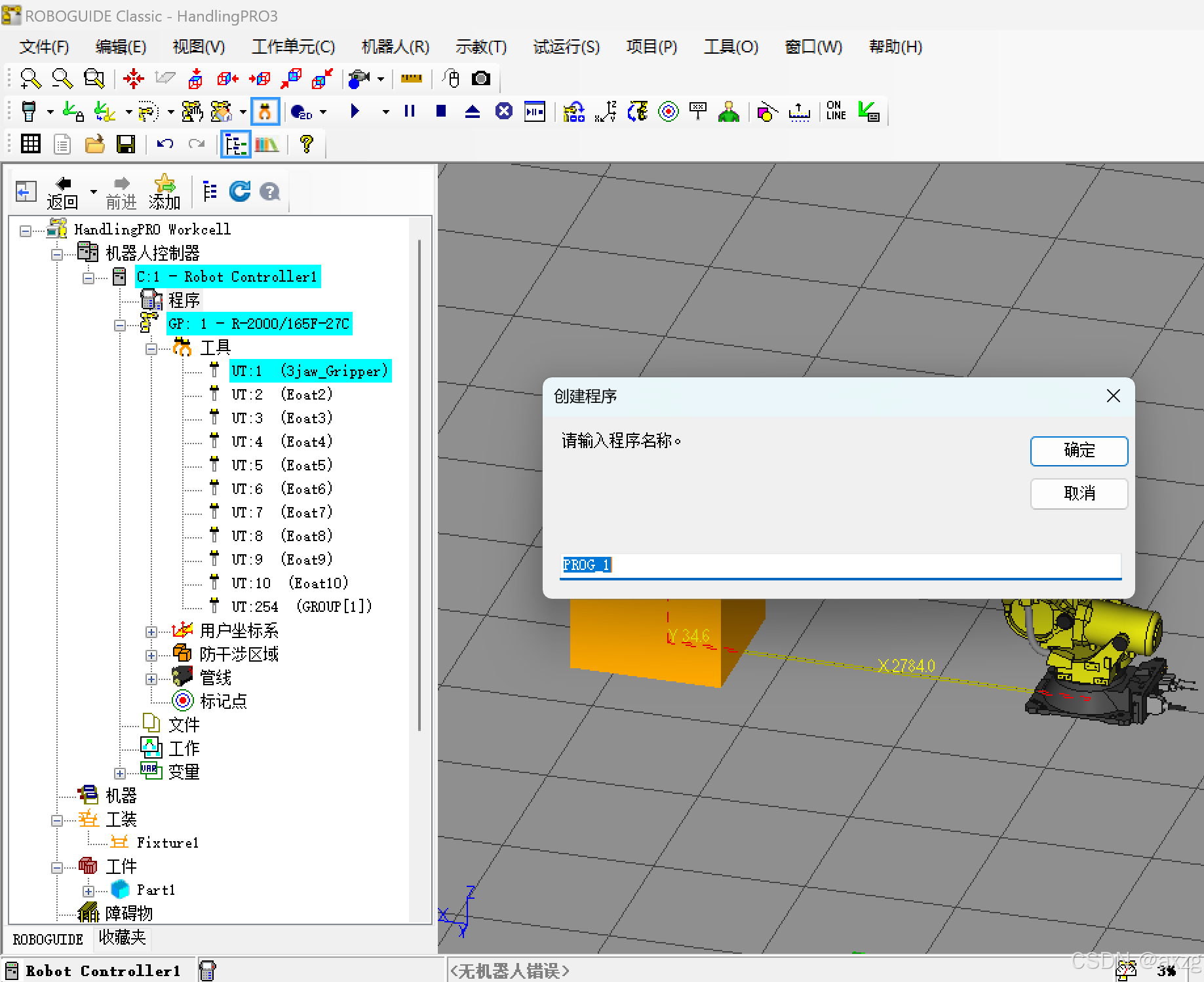
2.程序命名
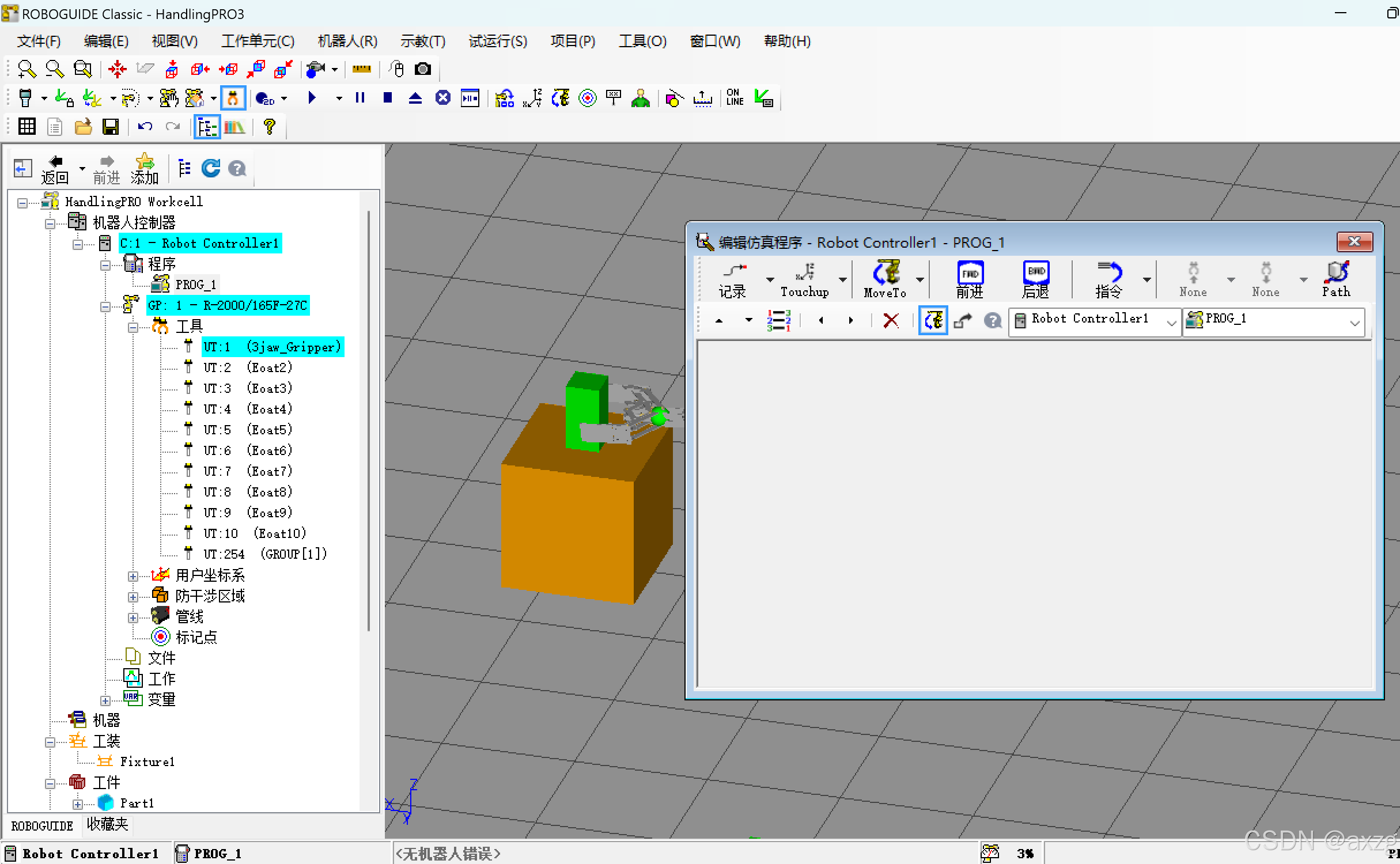
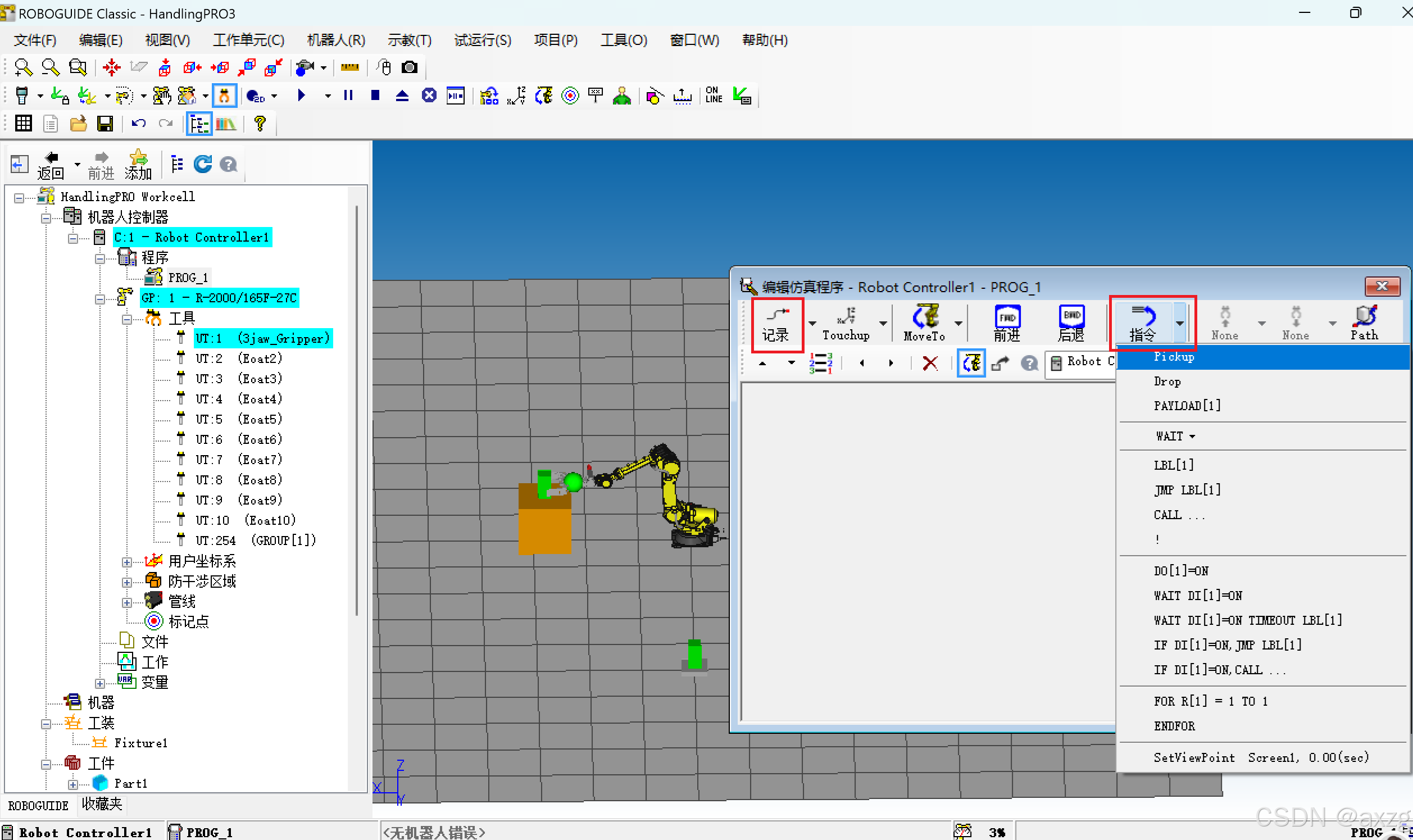
记录和指令
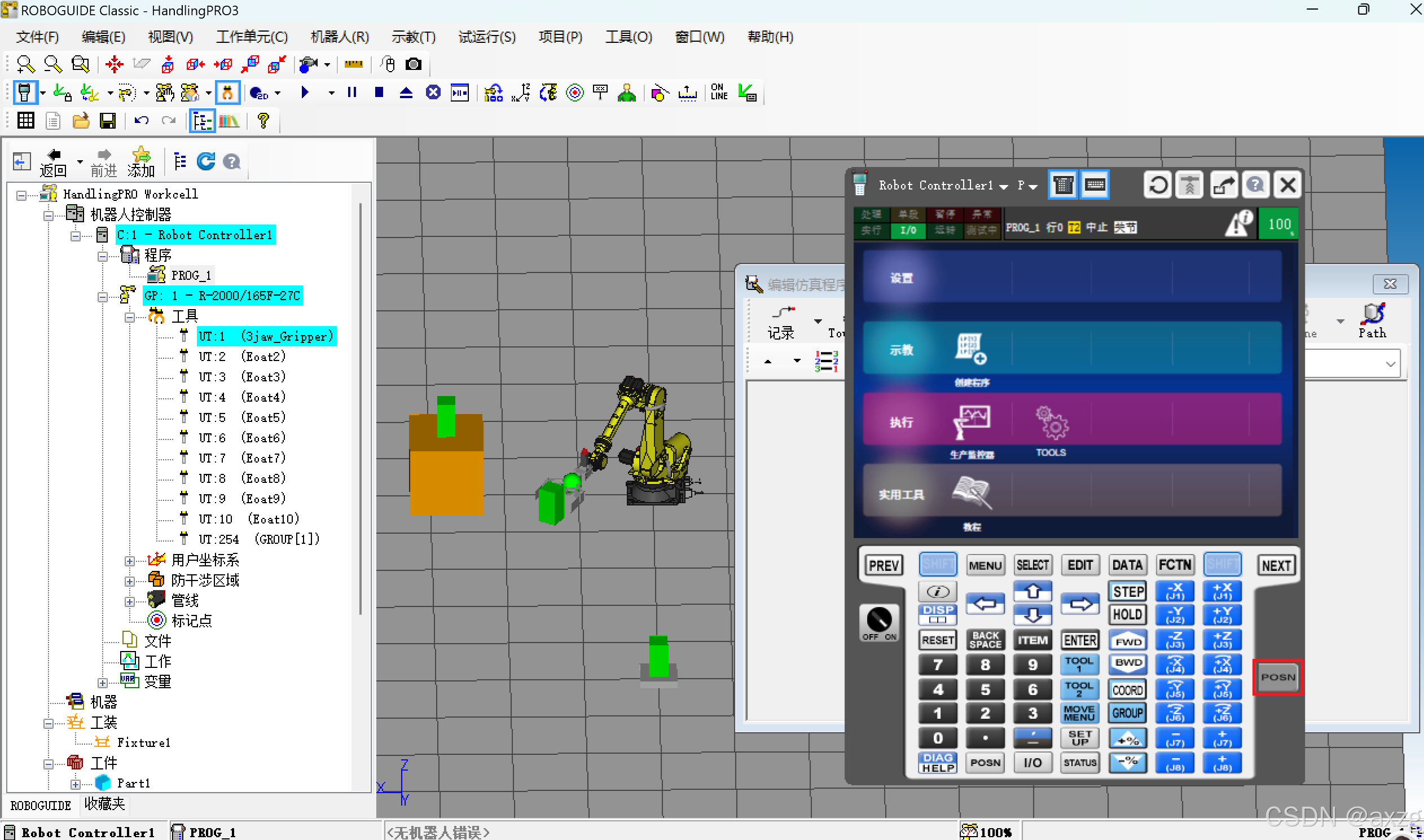
3.示教记录点位置
方法1 通过示教器POSN按键直接移动位置
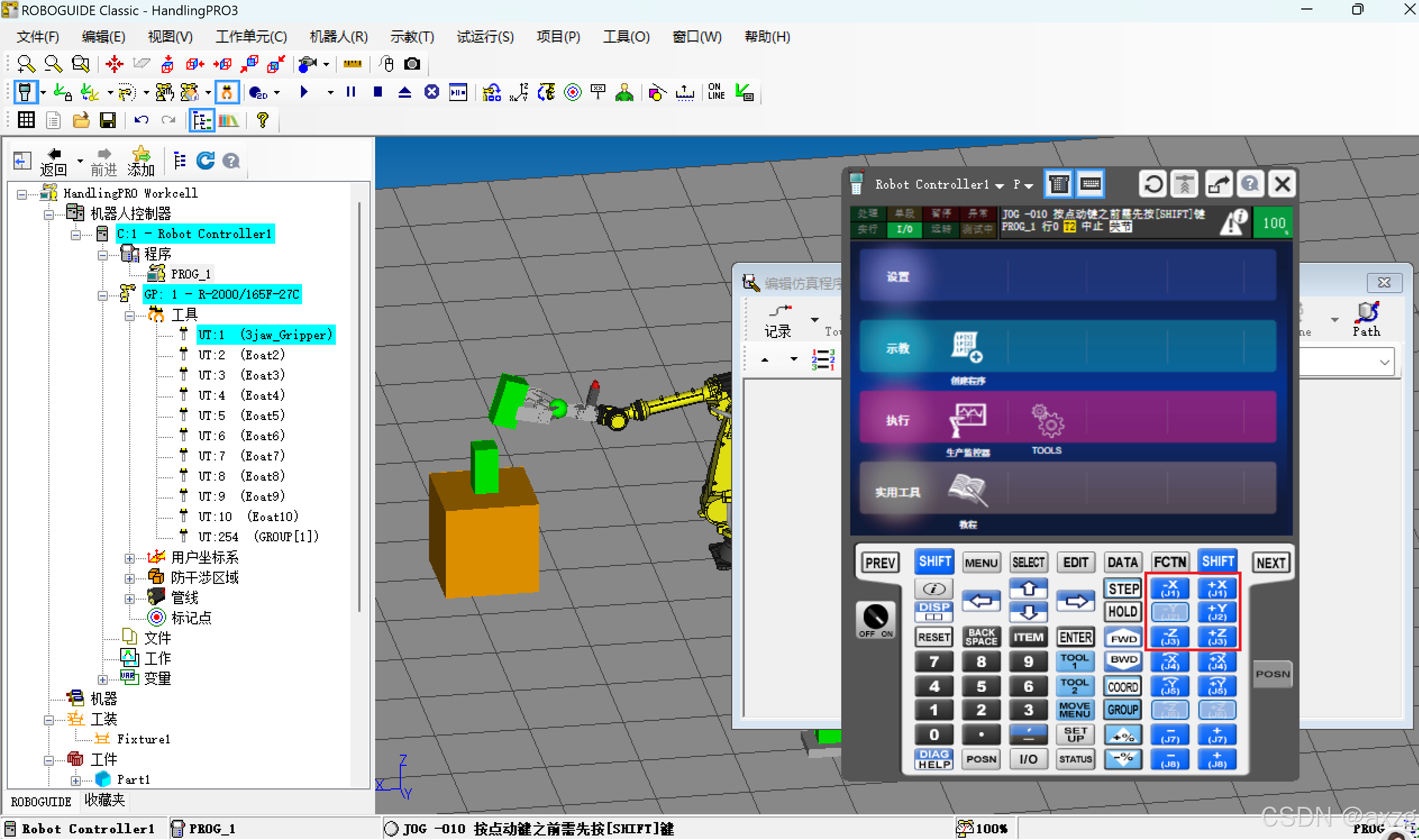
方法2 通过示教器 X Y Z 点动移动位置
记录位置P[1]

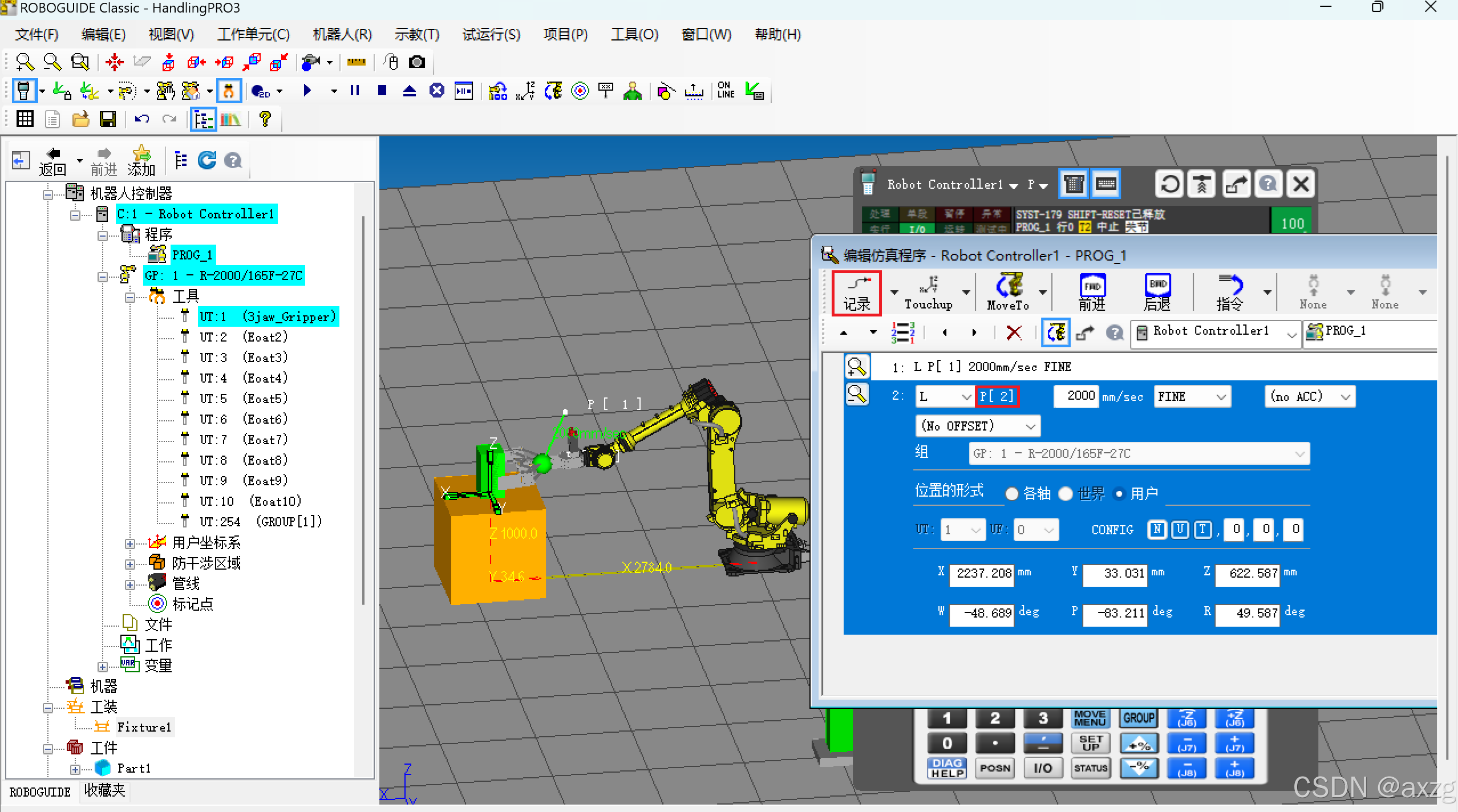
记录位置P[2]
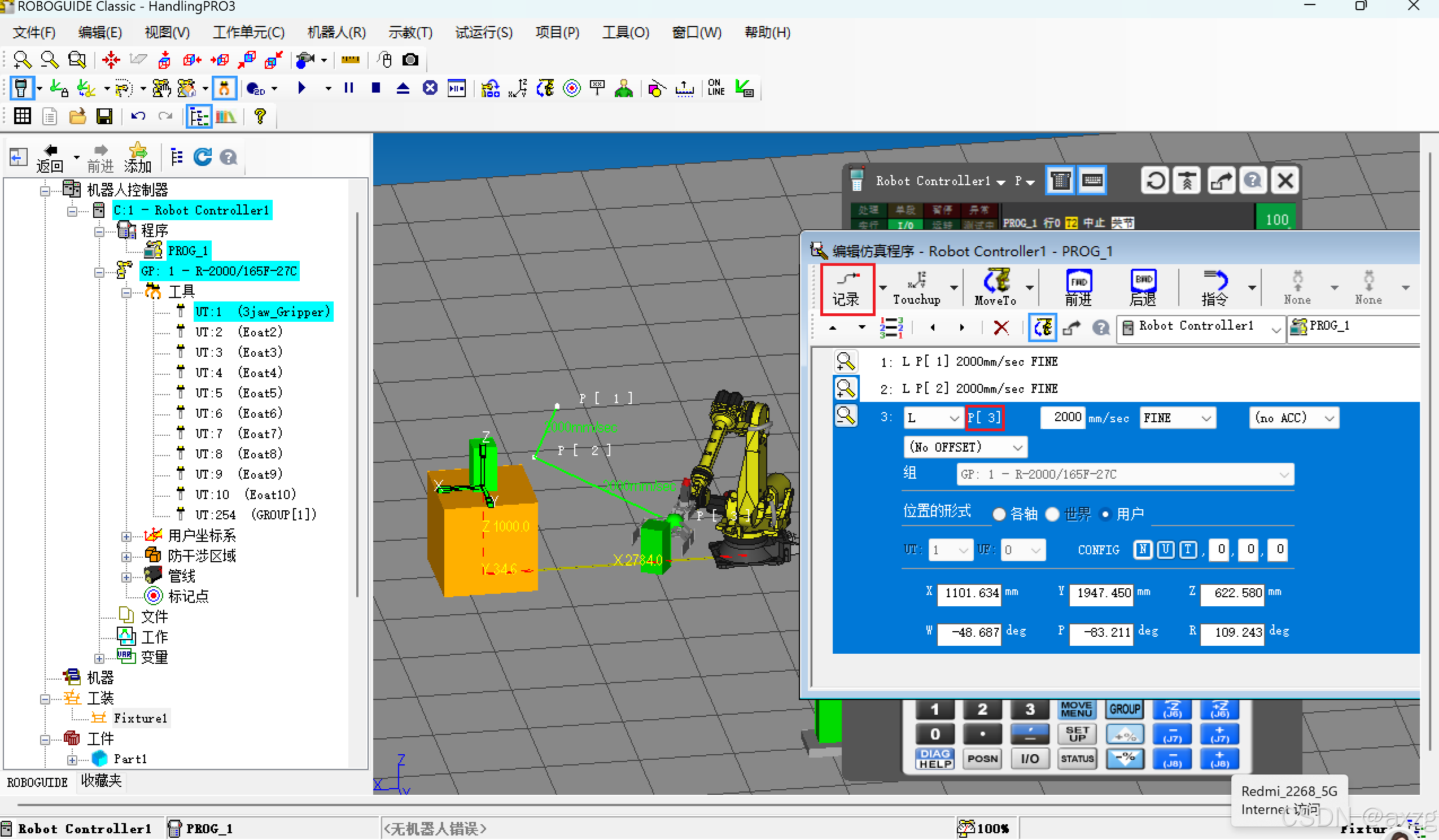
记录位置P[3]
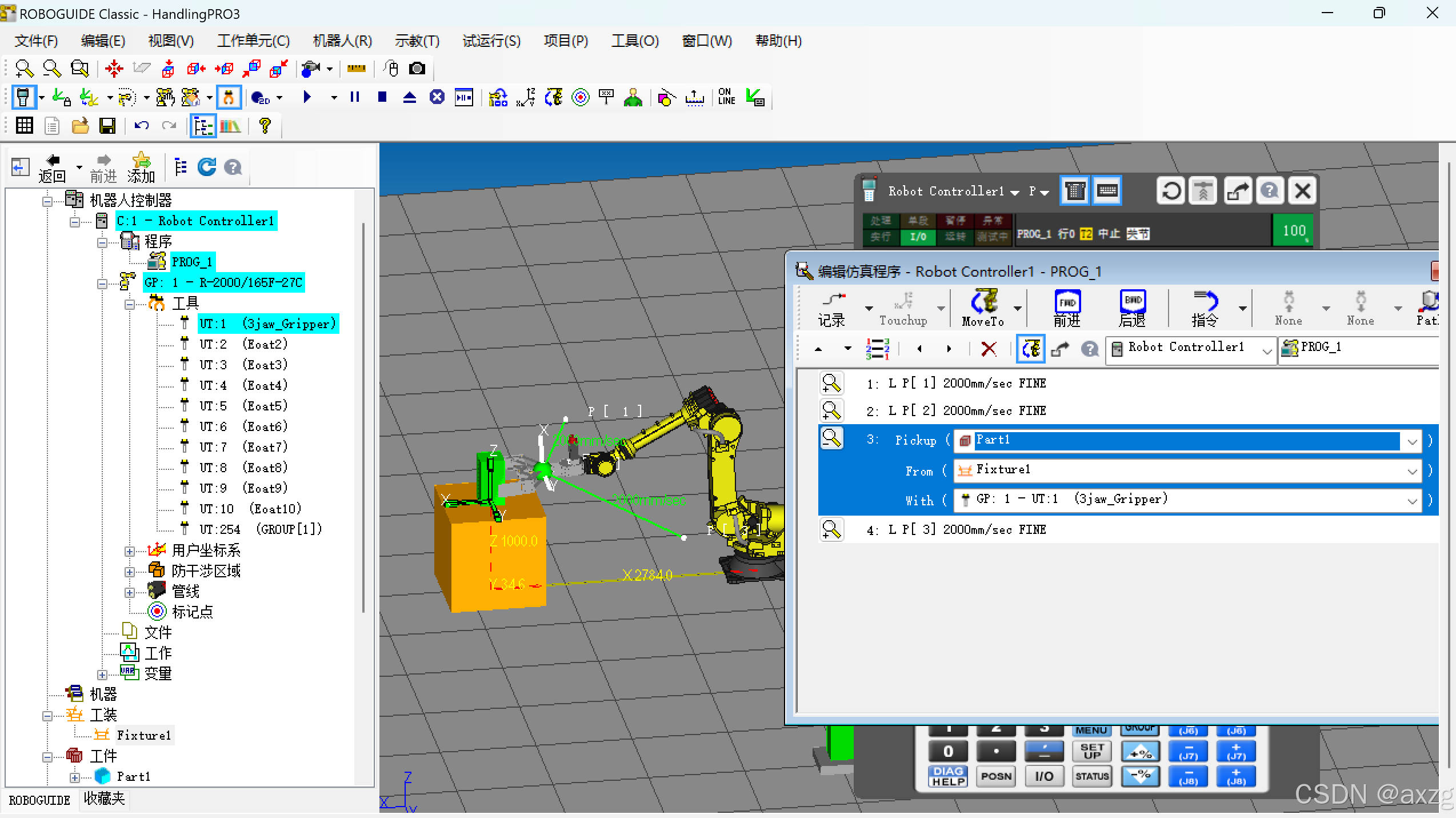
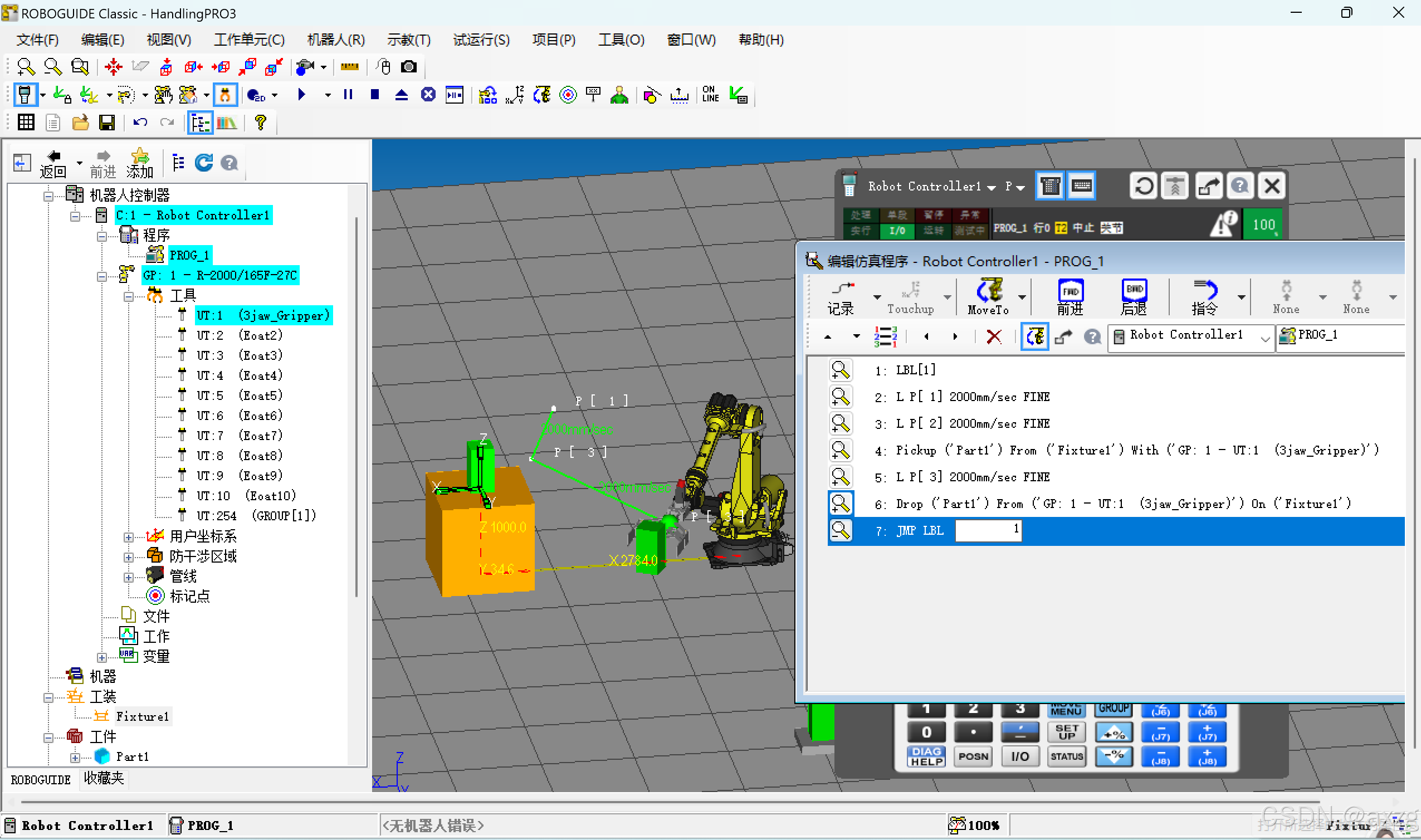
4.添加指令
添加Pickup指令
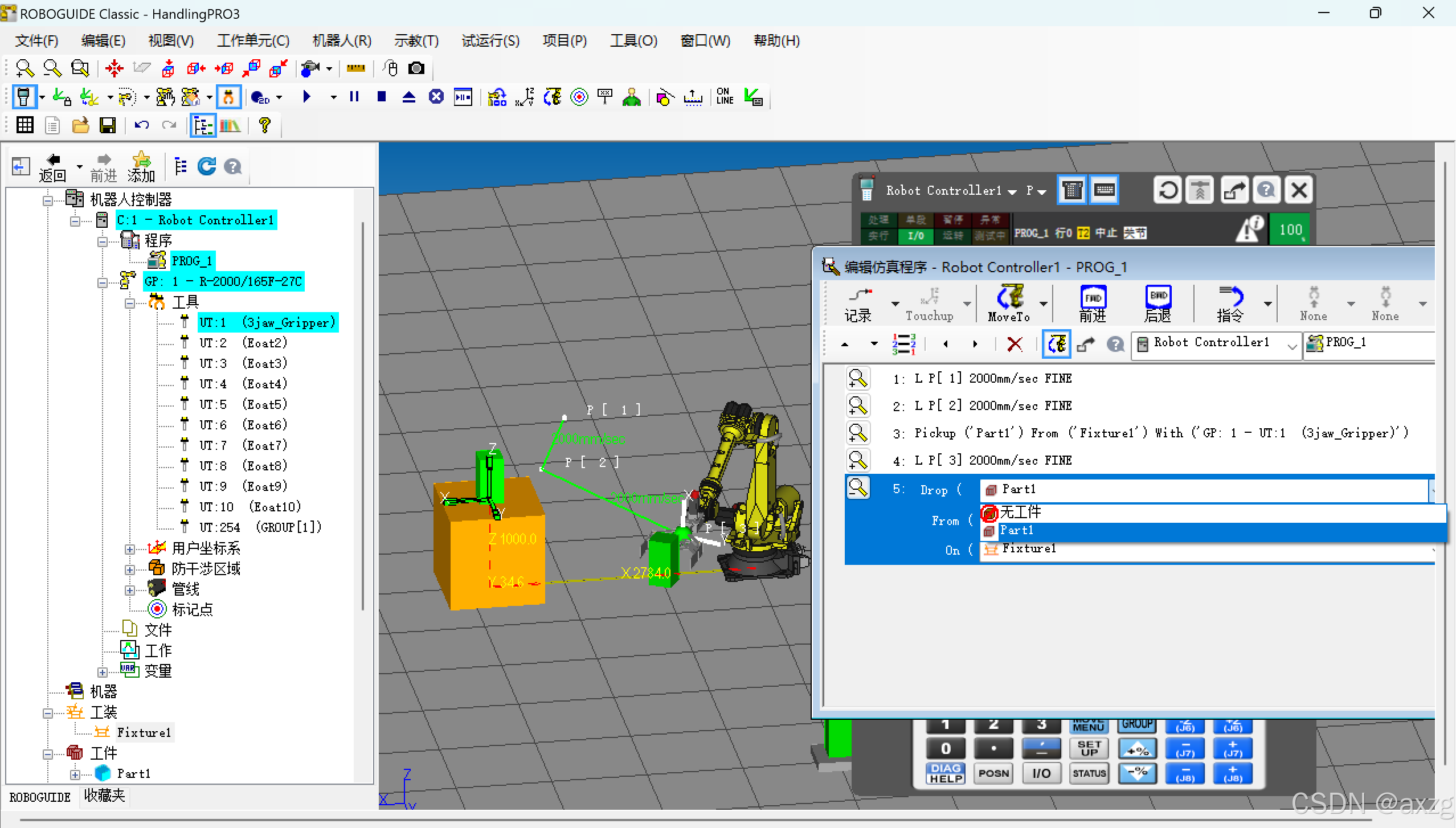
添加Drop指令
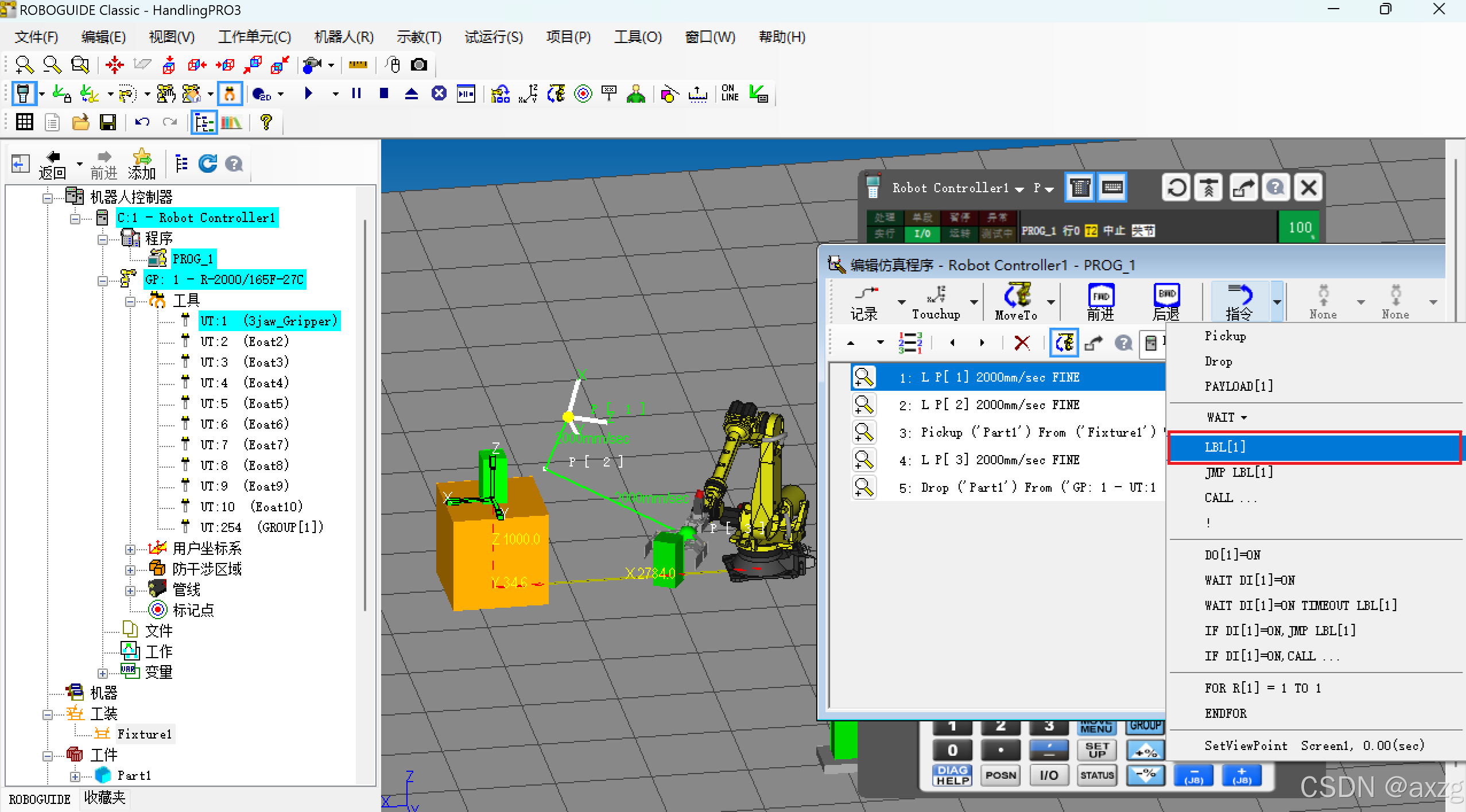
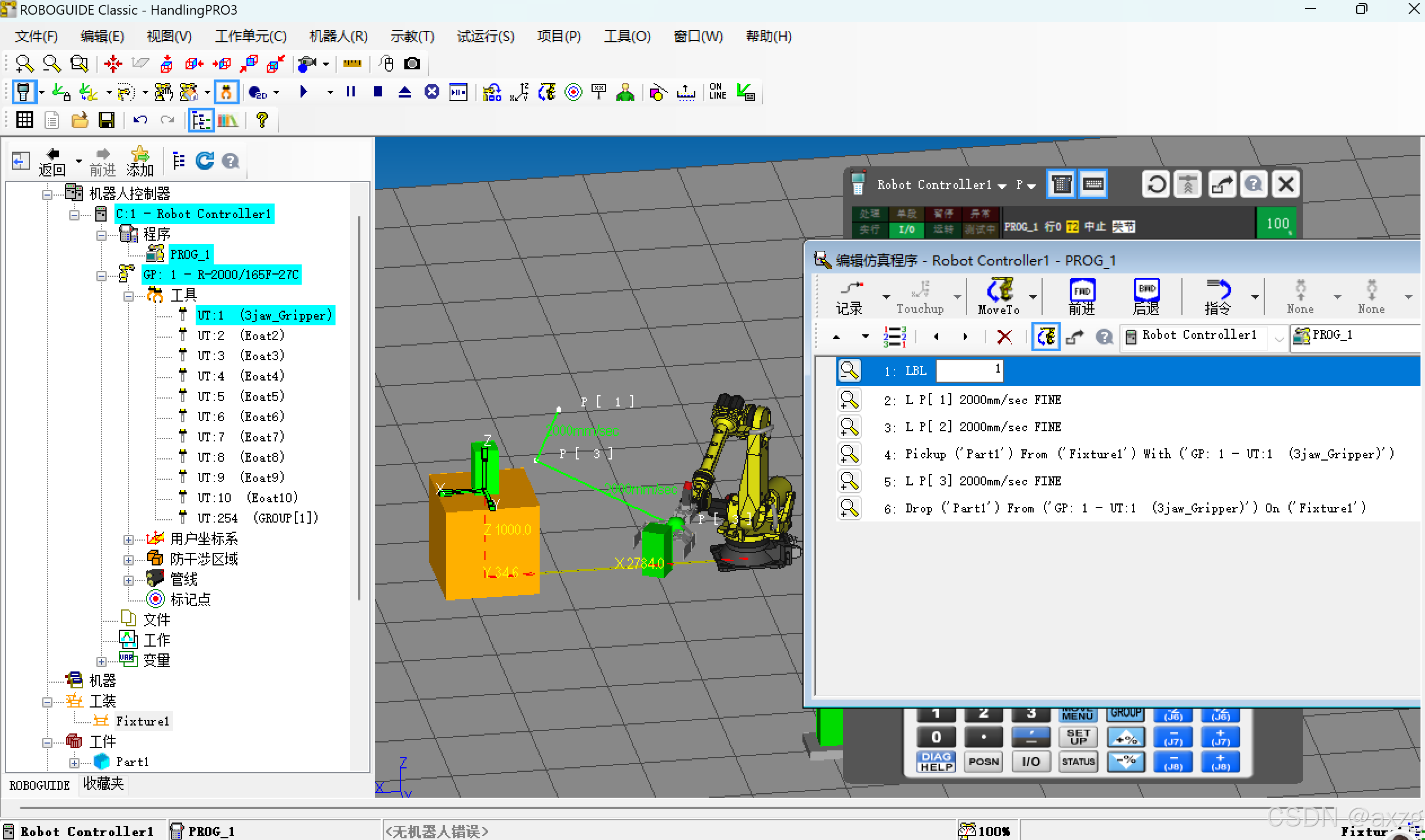
添加LBL[1]指令
指令上移动一行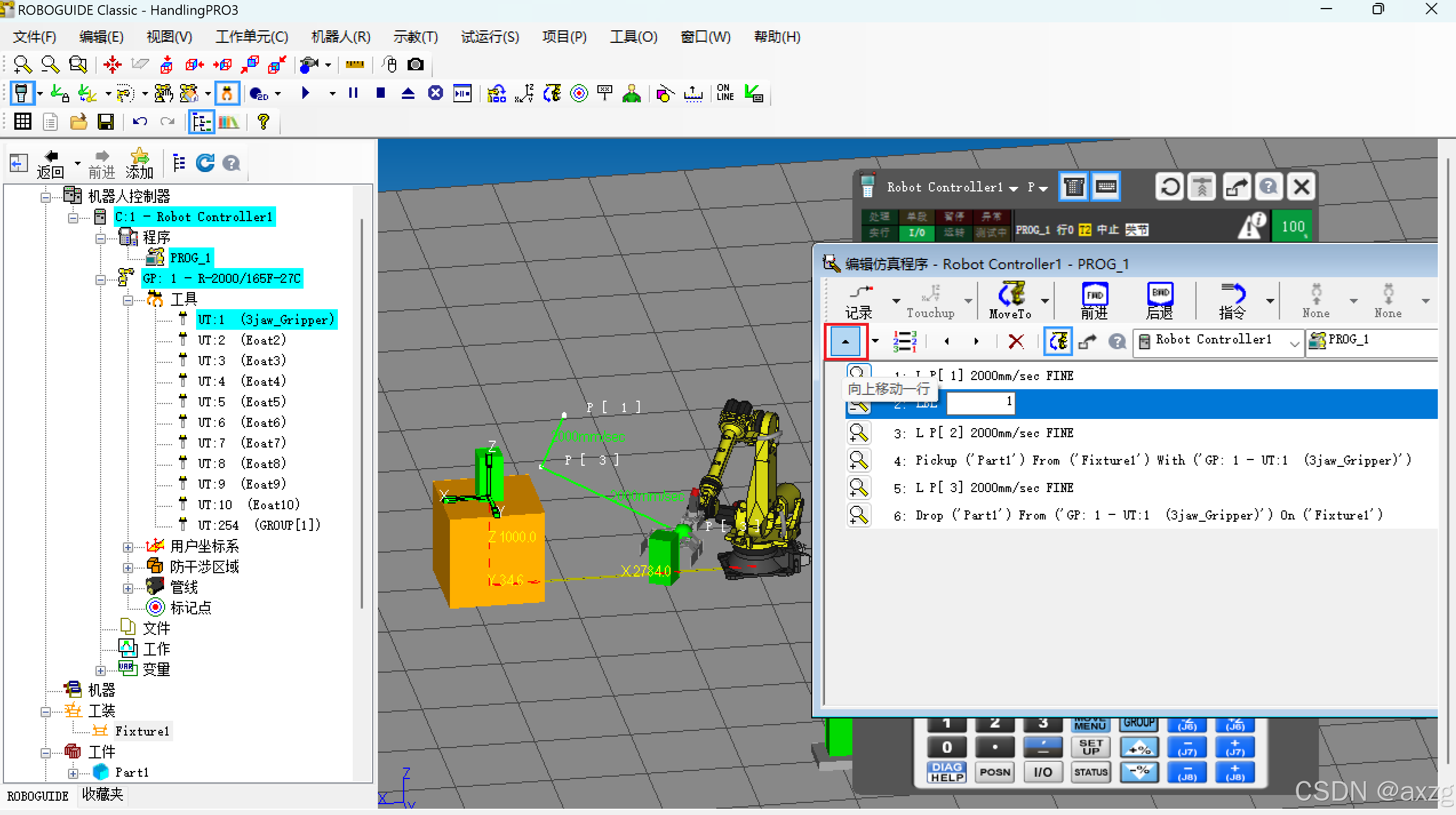
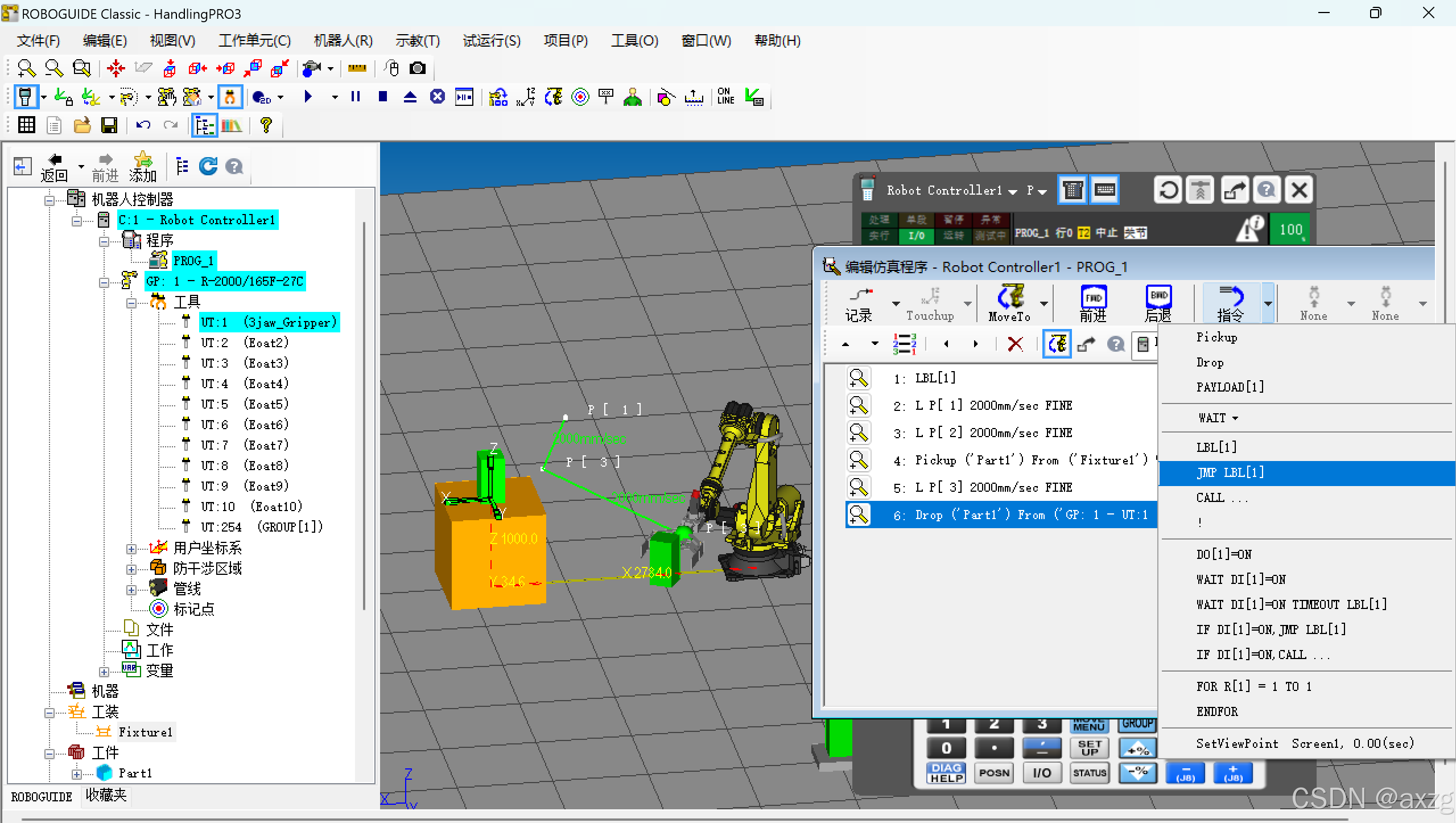
添加JMP LBL[1]指令
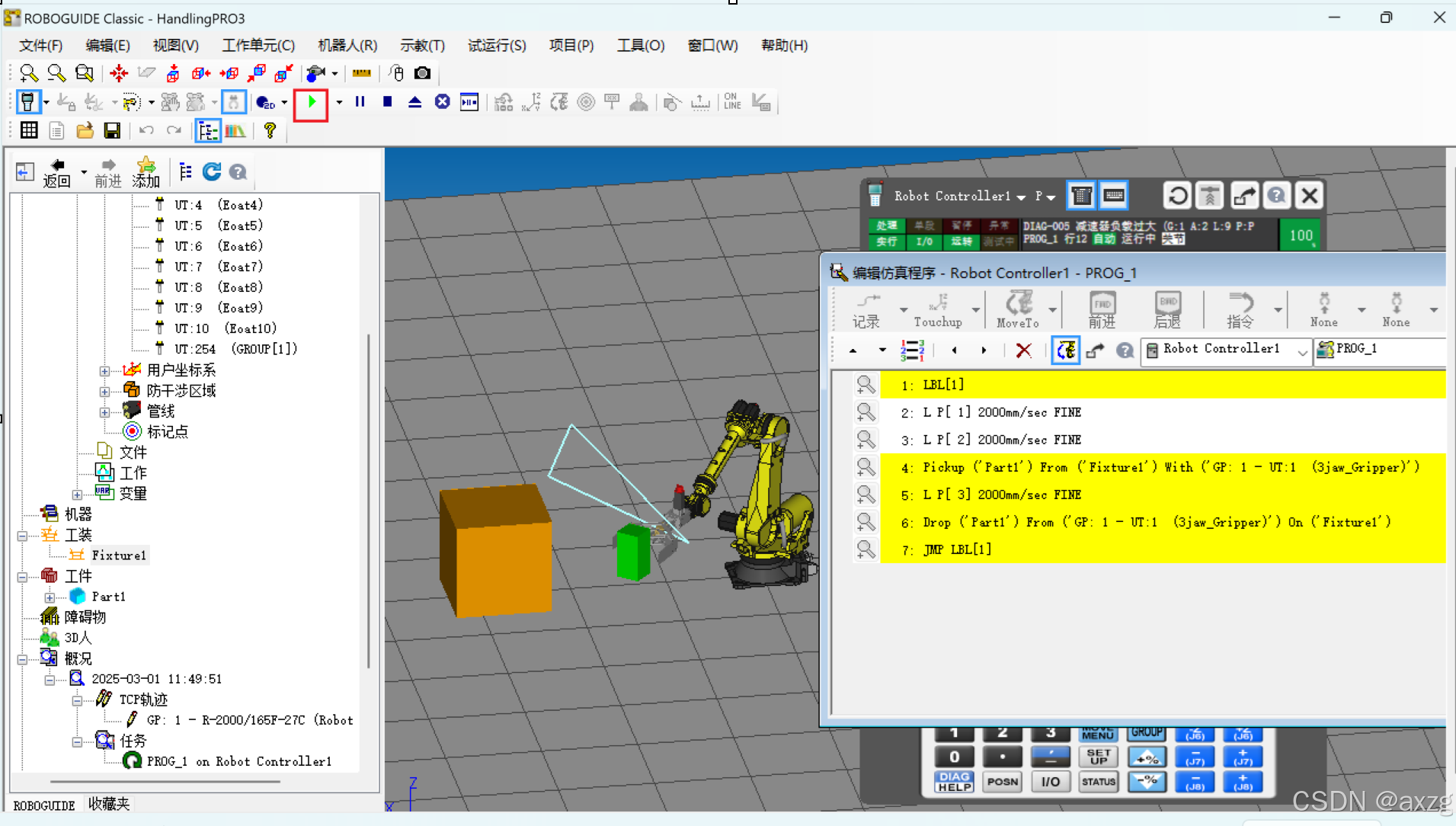
5.启动仿真
点击循环启动按钮
总结
本文介绍了基于ROBOGUIDE机器人仿真模拟的使用,有助于理解机器人的工作流程。

















 501
501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









