







一:创建项目
1.打开ROBOGUIDE,如下图所示,然后点击新建工作单元;

2.进入工作单元创建向导,选择“HandlingPRO”,即搬运工具(本例以搬运机器人进行举例说明),点击下一步

2.1 如下图所示,设置工作单元的名称,点击下一步

2.2 机器人的创建方法,选择新建,点击下一步;

2.3 选择机器人软件版本(一般选择最高版本),这里以V9.00-R-30iB Plus为例,点击下一步;

2.4 选择机器人应用程序,本文为搬运,所以选择搬运软件包,点击下一步;

2.5 选择机器人型号(如果选型错误,可以在创建之后再更改),本文选择H642,点击下一步;

2.6 添加动作组,本文选择未定义H877,点击下一步;
添加完机器人本体后可以添加附加设备。可以选择在同一控制柜中继续添加额外的机器人(也可在建立Workcell之后添加),还可添加Group2~8的设备,如变位机等。
注意:
1.在添加Group2~8内的设备时需要依次添加,不能跳组;
2.在列表中选择变位机等设备时,设备信息中带有添加组限制的只能添加在限制的对应组内;

2.7 进行机器人选项:软件选项、语言、详细设置,点击下一步;
添加各种应用类型内的软件功能,将它们用于仿真,添加较多的功能应用是搬运中的附加轴控制、码垛、点焊中的伺服枪设置、弧焊中的协同等。

软件选项–4D Graphics(R764)

语言–加选词典(简体中文)

详细设置–标准设置

2.8 汇总,显示当前设置和选择的所有参数,点击完成;

3.等待软件生成

输入选项1,然后点击键盘回车,等待初始化;

4.完成创建

二:界面介绍
Work cell建立完成后,会进入如图所示的工作空间;
画面的中心为创建工作单元时选择的机器人,机器人原点(如图绿色坐标)默认处在工作环境坐标系的原点。


机器人下方底板的参数可以修改:点击工具栏工作单元–属性,出现对话框;

对话框中选择3D空间,可以设置底板参数

1.坐标系

工具坐标系:相对于直角坐标系从末端法兰盘中心移到了工具尖端。



用户坐标系:用户自己定义。

三:示教器
如图为虚拟示教器

如果出现错误或者警告,点击示教器“RESET”复位键消除错误和警告。

1.点动
将控制装置面板的面板模式开关与【T1】对齐。虚拟示教器无此部分操作。

将TP有效开关切换为【ON】

反复按【COORD】键,将画面切换为“关节”

确认超驰控制器的速度为10%,如果不是10%,按【+%】或【-%】键(倍率键),将速度设置为10%

解除警报,执行机器人的点动运转时,轻握TP背面的安全开关单侧;虚拟示教器无此部分操作。

最后同时按下安全开关和【RESET】键即可解除警报。

各轴点动,在按下安全开关和【SHIFT】键期间,再按【-X(J1)】或【+X(J1)】键

对于J2轴至J6轴,也是在按下安全开关和【SHIFT】键期间,再按【-X(J)】或【+X(J)】键

直交点动,执行直交点动操作时,反复按【COORD】键,直至“世界”显示于画面。

确认超驰控制器的速度为10%,如果不是10%,按【+%】或【-%】键(倍率键),将速度设置为10%
X方向,在按下安全开关和【SHIFT】键期间,再按【-X(J1)】或【+X(J1)】键

对于Y方向和Z方向,在按下安全开关和【SHIFT】键期间,再按相应键。

绕X轴的旋转,在按下安全开关和【SHIFT】键期间,再按【-X(J4)】或【+X(J4)】键

对于Y方向和Z方向的旋转,在按下安全开关和【SHIFT】键期间,再按相应键

2.创建TP程序
2.1仿真软件创建TP程序
示教–创建TP程序

输入程序名,点击确定。

结果

2.2目录树创建TP程序
右键程序–创建TP程序

2.3示教器创建TP程序
点击示教器SELECT

点击创建

输入程序名,点击“Enter”,然后点击“编辑”,即可进入程序进行编辑。






3.示教点位
3.1方法一示教
进入程序编辑界面,点击“EDIT COMMAND”

点击插入,填2,表示插入两行空白程序

完成创建两行程序后,点击“MOVE TO POINT”

选择直线运动

将位置记录于程序中。位置被保存后,位置P[1]的数字将变成黑色,并在左侧显示“@”。

对机器人进行点动操作,将机器人移动到目标位点,
将光标放置于“位置[2]”的行内,点击“TOUCHUP POINT”将位置记录于程序中。
位置被保存后,位置[2]的数字将变成黑色,并在左侧显示“@”,重复操作。
3.2方法二人为修改
将光标移动到1,点击位置

修改位姿,点击完成。

也可以点击“形式”切换到关节模式进行示教。

四:运行程序
1.示教器运行
点击程序,进入程序,点击如下

2.软件运行
点击循环启动

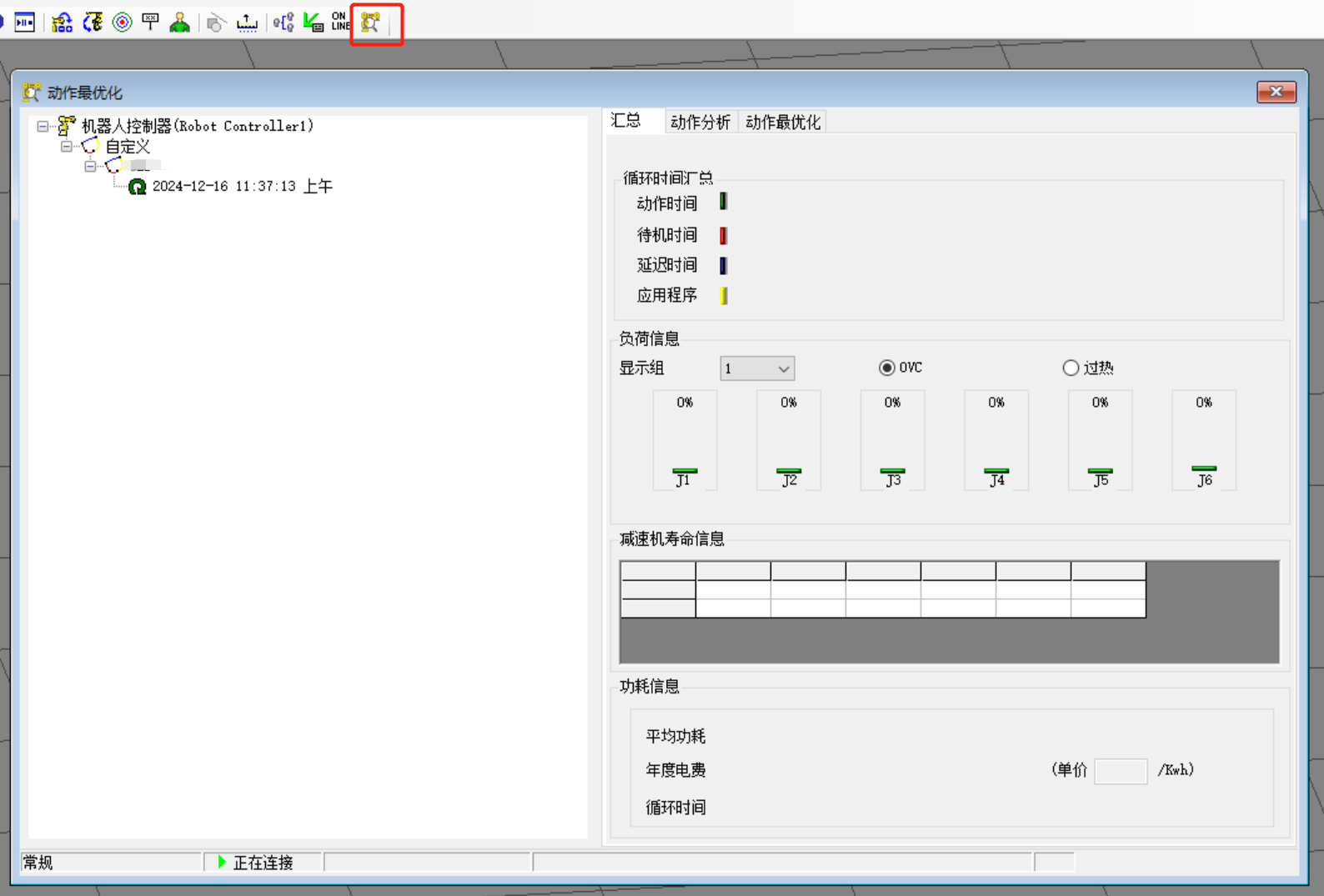
3.监视
点击动作最优化支持工具,右键机器人控制器开始采集,运行数据可以另存为csv格式数据。


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









