






1. 坐标系转换说明
涉及的两个坐标转换:
- nmea_pose_to_pose :光纤IMU中心到数据集IMU中心,主要是杆臂误差,转换关系为:
//======坐标转换的主要步骤(若发现有错误的地方,请评论指出)====== //定义光纤IMU和数据集IMU之间的杆臂 const Eigen::Vector3d t_AB_A(-0.00509546, 0.320372, 0.0669864); //定义光纤IMU和数据集IMU之间的姿态角(应该是以数据集右前下坐标系为基准) const Eigen::Vector3d rot_AB(179.928, -0.55273, -179.265); //光纤IMU到数据集IMU之间的转换四元数 Transformation T_AB(t_AB_A, eulerAngleToQuaternion(rot_AB * D2R)); //将光纤IMU组合导航解算的结果由导航系转化到载体系(右前下) Transformation T_WA(p_enu, q); //进一步将载体系下以激光IMU为中心转换到以MEMS IMU为中心 Transformation T_WB = T_WA * T_AB;而从 gici-open-dataset/intrinsics_and_extrinsics.yaml中看到的参数值为:
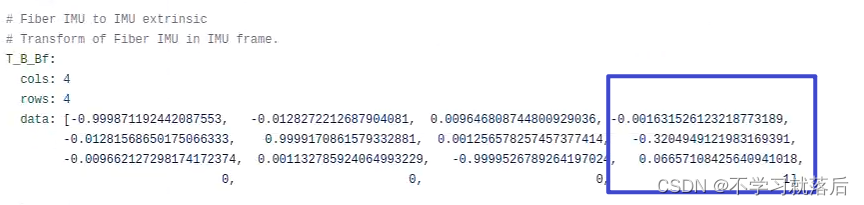
-
这里的旋转部分对应的欧拉角为:179.927 -0.553 -179.265,这个数值和nmea_pose_to_pose.cpp中的结果是一致的
-
而对应的杆臂存在一定的差异,主要是Y方向正负号不一致。
欧拉角 (角度): 179.927 -0.553 -179.265
数值上存在一定的差异。
- nmea_pose_to_position:由数据集IMU中心到GPS天线相位中心的杆臂补偿,转换到导航系。主要转换公式为:
//数据集IMU和GNSS APC之间的杆臂 const Eigen::Vector3d t_SR_S(0.354, -0.042, -0.029); //将杆臂转换到导航系下,并将改正数加到导航系下的坐标NEU里。 p_enu = p_enu.eval() + q * t_SR_S;代码中的杆臂为:(0.354, -0.042, -0.029)
而从 gici-open-dataset/intrinsics_and_extrinsics.yaml中看到的参数值为: -

两者也存在数值上的差异。
2. 杆臂误差处理(载体系投影到导航系)
导航系(n):站心坐标系,一般以运动起始时刻作为站心原点,坐标轴:北东地
载体系(b):以IMU或GNSS为中心,坐标轴:前右下
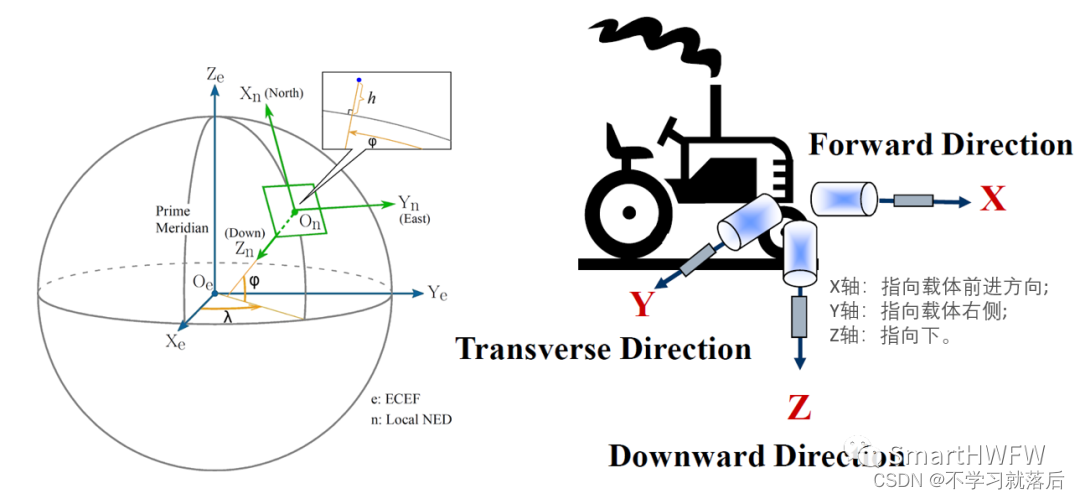
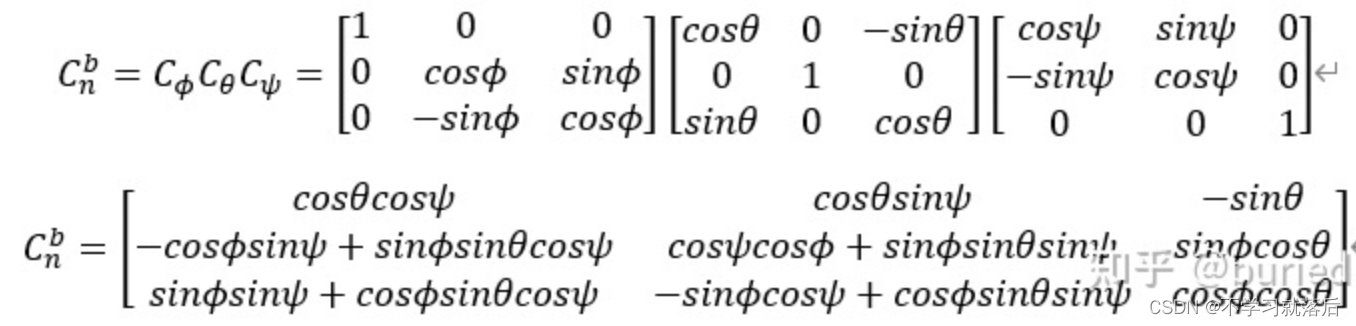
[北东地——前右下]坐标系下欧拉角旋转顺序:
航向角(绕Z轴)—俯仰角(绕Y轴)—横滚角(绕X轴):
第一个转动角度:航向角(绕Z轴旋转ψ角)
第二个转动角度:俯仰角(绕Y轴旋转 θ 角)
第三个转动角度:横滚角(绕X轴旋转ϕ 角)
注意 俯仰角和横滚角:方向与对应轴向转动方向一致,绕对应轴正转,相应姿态为正;绕对应轴反转,相应姿态为负。X轴指北时,航向角为零。北偏东顺时针依次从0变为360°
对应的旋转矩阵为:
最后一定注意欧拉角旋转顺序与定义啊兄弟们,别搞混了,坐标系选取不同定义也不同的!!!!!!
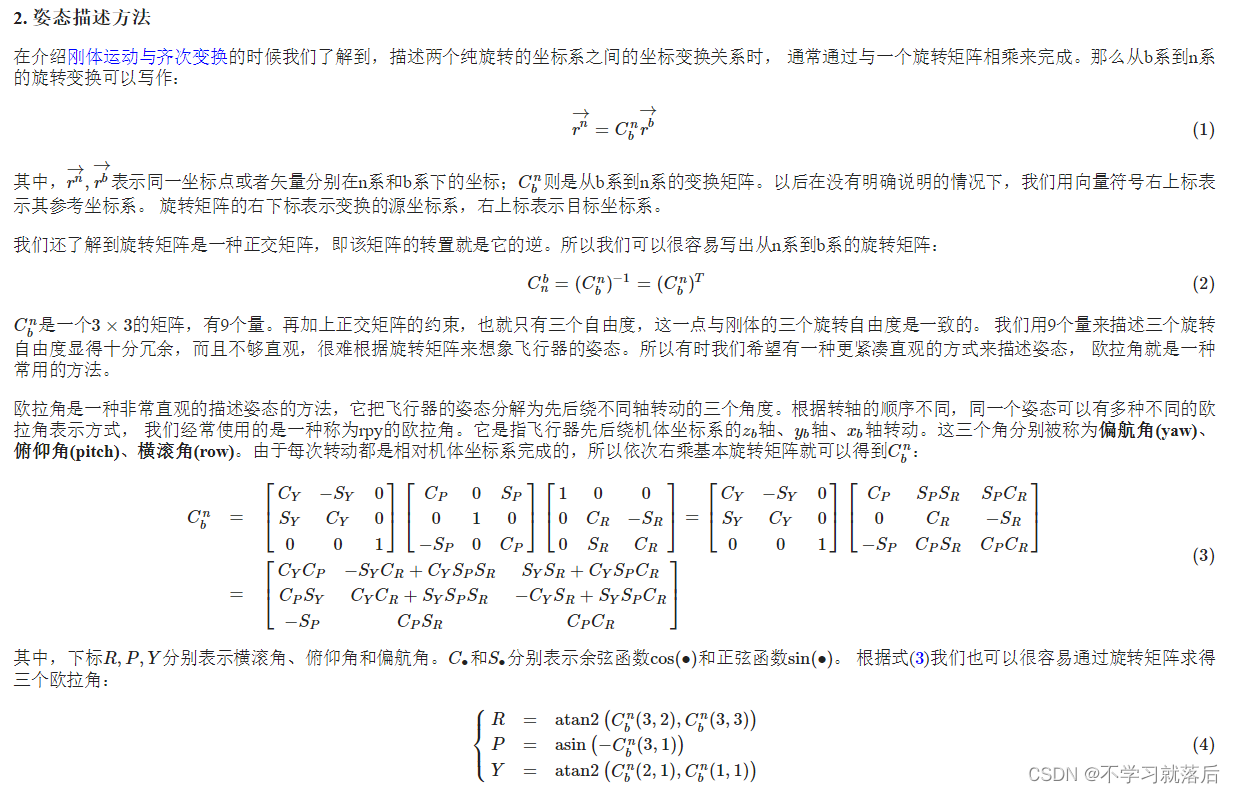
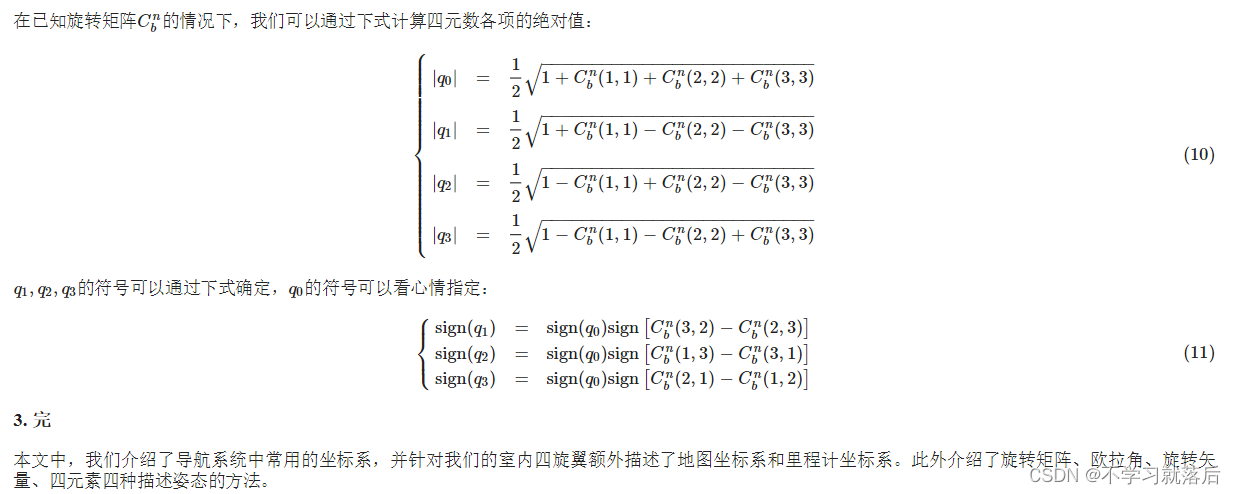
2. 欧拉角和四元数的关系原理
文章来源:无处不在的小土-导航坐标系与姿态描述方法
















 1912
1912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









