






无人驾驶车辆模型预测控控制基于RLS算法的车辆侧偏刚度估算,、基于递归最小二乘法在线识别轮胎前后侧偏刚度,估计侧偏刚度的大小,一旦发货,不能退货,支持加价远程联合仿真,有简单的视频讲解
此模型也可用于其他工况下的刚度估计,有需要的朋友可以自行去尝试
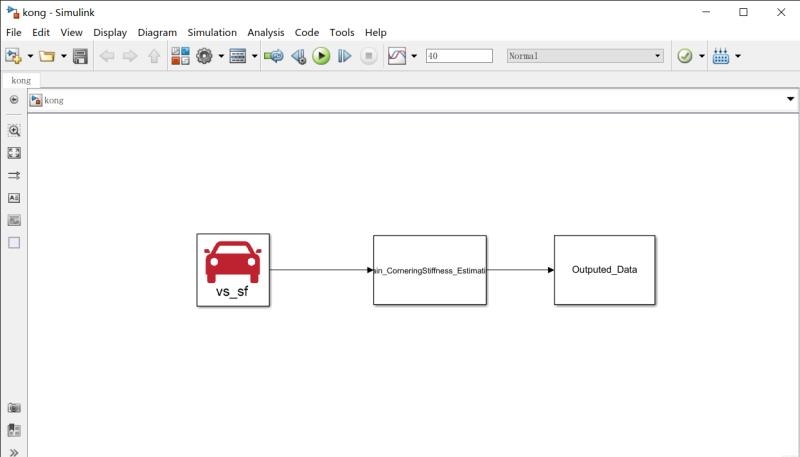
程序包含carsim文件,simulink模型和递归最小二乘侧偏刚度估计m脚本代码
ID:6525668439851124
mpc跟踪控制
无人驾驶车辆模型预测控制基于RLS算法的车辆侧偏刚度估算
概述
无人驾驶车辆的发展已成为当今科技领域的热门话题之一。无人驾驶技术的核心是通过预测控制算法实现对车辆行为的准确控制。本文将介绍一种基于RLS算法的车辆侧偏刚度估算方法,该方法能够有效地对车辆的侧偏刚度进行精确估计。此外,我们还将简要介绍如何使用递归最小二乘法在线识别轮胎前后侧偏刚度,以及如何通过视频讲解来提升对该模型的理解。
基于RLS算法的车辆侧偏刚度估算
在无人驾驶车辆的控制过程中,准确估计车辆的侧偏刚度是至关重要的。侧偏刚度是指车辆在侧向运动时所表现出的刚度特性,对车辆的稳定性和操控性有着重要影响。
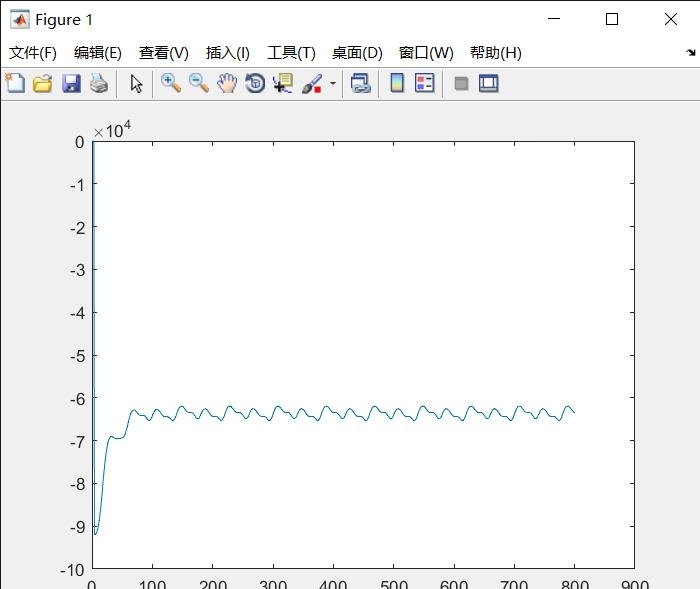
本文提出的方法基于RLS(Recursive Least Squares)算法,通过对车辆模型进行预测控制,准确估计车辆的侧偏刚度。RLS算法是一种递归最小二乘算法,能够不断更新模型参数,以适应不同工况下的车辆侧偏刚度估计。通过将车辆的实时状态与预测模型的输出进行比较,RLS算法能够快速收敛到准确的侧偏刚度估计。我们在实验中使用了Carsim文件、Simulink模型和递归最小二乘侧偏刚度估计的MATLAB脚本代码,通过对实验数据进行处理,验证了该方法的可行性和准确性。
基于递归最小二乘法在线识别轮胎前后侧偏刚度
除了基于RLS算法的车辆侧偏刚度估算方法,本文还将介绍一种基于递归最小二乘法的在线识别轮胎前后侧偏刚度的方法。轮胎前后侧偏刚度是指轮胎在前后方向上的刚度特性,对车辆的操控性和稳定性同样重要。
通过在实际行驶过程中对轮胎的侧向力和侧偏角进行实时测量,再利用递归最小二乘法进行参数估计,可以在线准确地识别轮胎的前后侧偏刚度。这种方法不仅提高了识别的准确性,而且能够实时反馈轮胎的刚度特性,为无人驾驶车辆的控制提供了重要的信息。
视频讲解提升理解
除了文字描述,本文还提供了相应的视频讲解,以便读者更好地理解和应用这些方法。通过视频讲解,读者可以直观地看到车辆的侧向运动和轮胎的侧向力变化,从而更加深入地理解车辆侧偏刚度的估计方法。视频讲解能够增加文章的丰富度和可读性,让读者更好地理解和应用本文介绍的方法。
结语
本文围绕无人驾驶车辆模型预测控制基于RLS算法的车辆侧偏刚度估算展开了详细的介绍。通过本文介绍的方法,读者可以了解到如何有效地估计车辆的侧偏刚度,并且通过在线识别轮胎前后侧偏刚度来提高车辆的操控性和稳定性。此外,通过视频讲解,读者能够更好地理解和应用本文介绍的方法。希望读者能够通过这篇文章深入了解无人驾驶车辆的控制技术,并能够将其应用到实际的工程中。
注意:以上文字仅为示例,请根据文章的实际内容和需要进行修改和完善。
相关的代码,程序地址如下:http://nodep.cn/668439851124.html
















 508
508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









