






自定义障碍物,无人驾驶基于mpc的轨迹重规划跟踪,carsim2019,similink2018,有对应程序的视频讲解
ID:4830668439147990
规控算法工程师
自定义障碍物在无人驾驶技术中扮演着至关重要的角色。随着自动驾驶技术的迅猛发展,人们对于车辆能够适应各种复杂道路环境的需求也越来越高。而自定义障碍物的引入,为无人驾驶车辆在复杂场景下的轨迹规划与跟踪提供了更加灵活和可控的方式。
在本文中,我们将探讨基于模型预测控制(Model Predictive Control,MPC)的无人驾驶轨迹重规划和跟踪方法,并结合Carsim2019和Simulink2018这两个强大的工具,通过视频讲解的方式来呈现相应的程序实现。
首先,让我们简要介绍一下MPC在无人驾驶领域的应用。MPC是一种基于优化的控制策略,通过预测车辆未来一段时间的运动轨迹,并在每个时间步上通过求解优化问题来选择最优的控制输入。相比于传统的反馈控制方法,MPC不仅可以处理复杂的约束条件,还可以充分考虑车辆动力学模型和环境信息,从而实现更加高效和安全的控制。
然而,在实际应用中,无人驾驶车辆往往面临各种各样的障碍物,如行人、其他车辆、路标等。为了能够有效地规划和跟踪轨迹,我们需要对这些障碍物进行建模和预测。此时,自定义障碍物的概念便应运而生。通过准确地描述障碍物的运动特征和行为,我们可以将其纳入轨迹规划和跟踪的考虑范围,并作为约束条件进行优化。
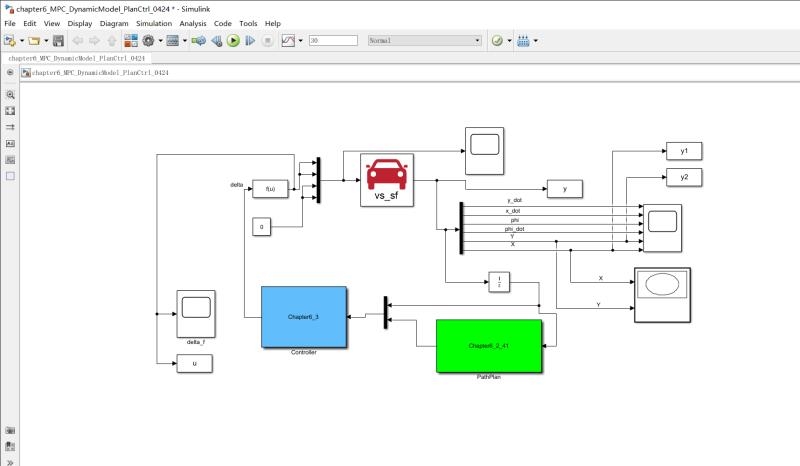
实现自定义障碍物的关键在于对其运动特征的建模。我们可以借助Carsim2019来模拟障碍物在不同道路环境下的运动行为,并将模拟结果导入到Simulink2018中与无人驾驶车辆进行交互。通过这种方式,我们可以更加真实地模拟障碍物的行为,并在轨迹规划和跟踪中进行相应的优化。
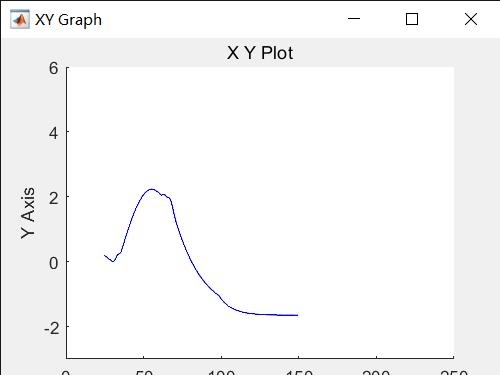
在视频讲解中,我们将演示如何使用Carsim2019和Simulink2018来实现自定义障碍物的无人驾驶轨迹重规划和跟踪。我们会详细介绍建立障碍物模型的方法,并展示在复杂场景下车辆的运动轨迹和障碍物的动态变化。同时,我们还会对MPC控制策略进行深入分析,并给出相应的仿真结果和性能评估。
综上所述,自定义障碍物对于无人驾驶车辆的轨迹重规划和跟踪至关重要。通过引入自定义障碍物的概念,并结合Carsim2019和Simulink2018等强大的工具,我们可以实现更加灵活和可控的无人驾驶控制策略。相信通过我们的视频讲解,读者们将对无人驾驶技术有更深入的了解,并在实际应用中取得更好的效果。
注意:本文所述技术仅供参考,请在实际应用中慎重考虑。自动驾驶技术的发展仍需持续努力,以确保安全和可靠性。感谢您的阅读!
相关的代码,程序地址如下:http://nodep.cn/668439147990.html
















 628
628











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









