






秩K准则的简单介绍:
使用秩K准则判断实现信息融合,网络中的每个单静态雷达都能做出局部判断 ,其中
,其中 ,根据其自身对目标回波的处理结果,将判断结果发送到网络雷达系统的信息处理中心。该中心生成一个全局判断向量
,根据其自身对目标回波的处理结果,将判断结果发送到网络雷达系统的信息处理中心。该中心生成一个全局判断向量 ,基于这些地方的判断。总共有
,基于这些地方的判断。总共有 种可能性
种可能性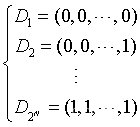
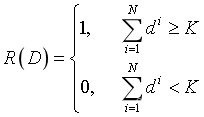
然后,处理中心基于全局判断向量进行判断,并将判断规则标注为
上式表明,当网络中有K个或K多个雷达同时发现该目标时,网络雷达系统确定找到目标。
因此,根据秩K判定准则可以得到关于目标m的网状雷达系统的检测概率模型为
上式表明,当网络中有K个或K多个雷达同时发现该目标时,网络雷达系统确定找到目标。
因此,根据秩K判定准则可以得到关于目标m的网状雷达系统的检测概率模型 为
为
集合 是使融合中心判为“1”的局部判决向量D所构成的集合,由融合规则
是使融合中心判为“1”的局部判决向量D所构成的集合,由融合规则 确定;集合
确定;集合 是使融合中心判为“0”的局部判向量D所构成的集合;
是使融合中心判为“0”的局部判向量D所构成的集合;
***博主自我理解:***关于雷达检测概况的秩K准则,直接搜索很难找到有用的信息,只有在知网中才能搜到有用的信息,对初学者很不友好。
对于该公式,建议理解方式如下:(假设pi为第i个雷达站发现目标的概率)
首先考虑所有雷达站点均没有发现目标,即R(D)=0的情况,显然此时的检测概率为雷达站全都没有检测到的情况下的概率,即p=(1-p1)x(1-p2)x…(1-pn)
此时的Pd_0=pxR(D)
同理有一个雷达站检测到的情况下的概率(假设为1雷达站):p=p1x(1-p2)x…(1-pn)
此时的Pd_1=pxR(D)
以此类推
假设全部雷达站都发现次目标:p=p1xp2x…xpn
此时的Pd_2^N=pxR(D)
Pd=Pd_0+Pd_1+…+Pd_2^N
即如下公式:
参考文献:
[1]韩国玺,何俊,祁建清.基于秩K准则的网络雷达对抗系统融合发现概率计算模型[J].海军工程大学学报,2014,26(01):64-70.















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









