







参考:stm32 定时器输出PWM原理及工作原理+控制舵机
作者:点灯小哥
发布时间: 2021-03-09 23:17:52
网址:https://blog.csdn.net/weixin_46016743/article/details/114606662
参考:stm32之pwm输出
作者:打酱油的;
发布时间: 2021-04-11 14:59:05
网址:https://blog.csdn.net/weixin_46098612/article/details/115597823
目录
前言
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
PWM的工作原理
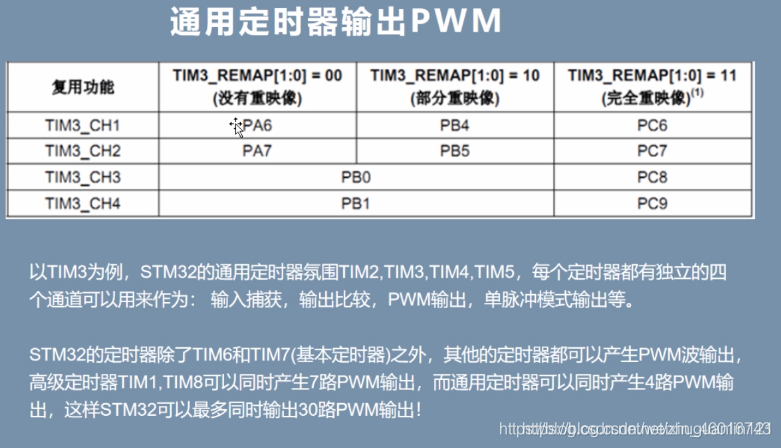
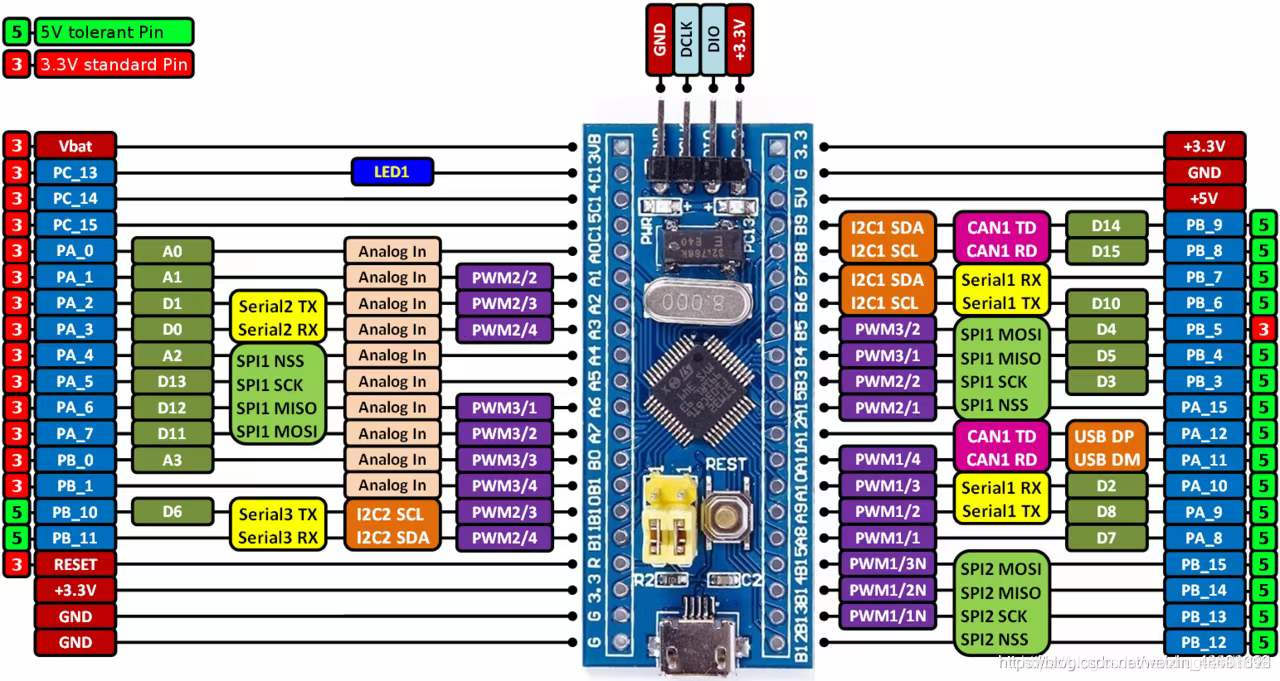
TIM3通道2,即PB5,作为本实验连接舵机的引脚。
为何不是通道3PWM输出?不太理解。
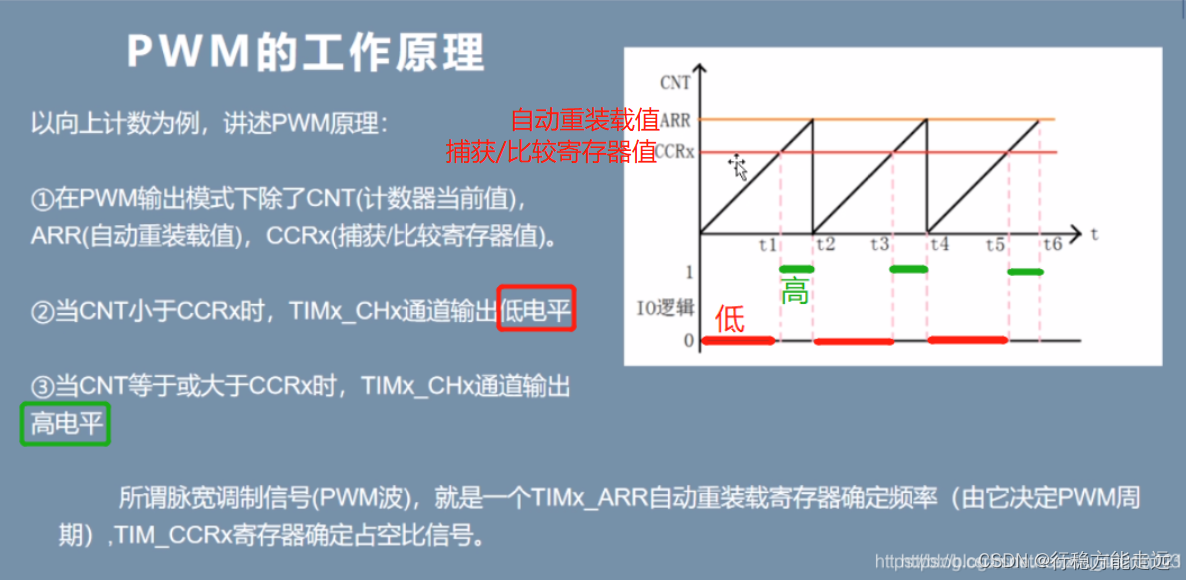
上图最后一句话,点明PWM的原理。
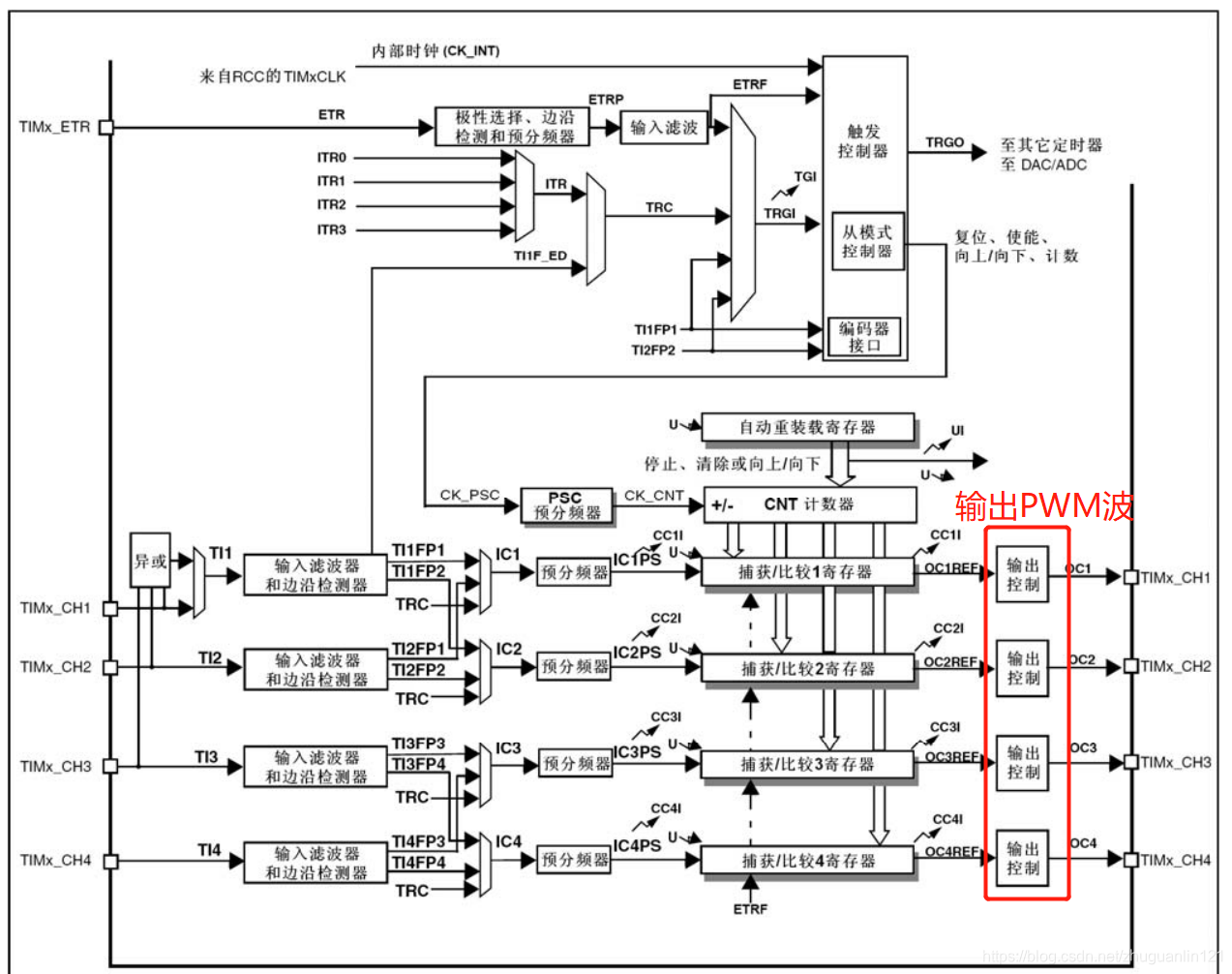
PWM的内部运作机制
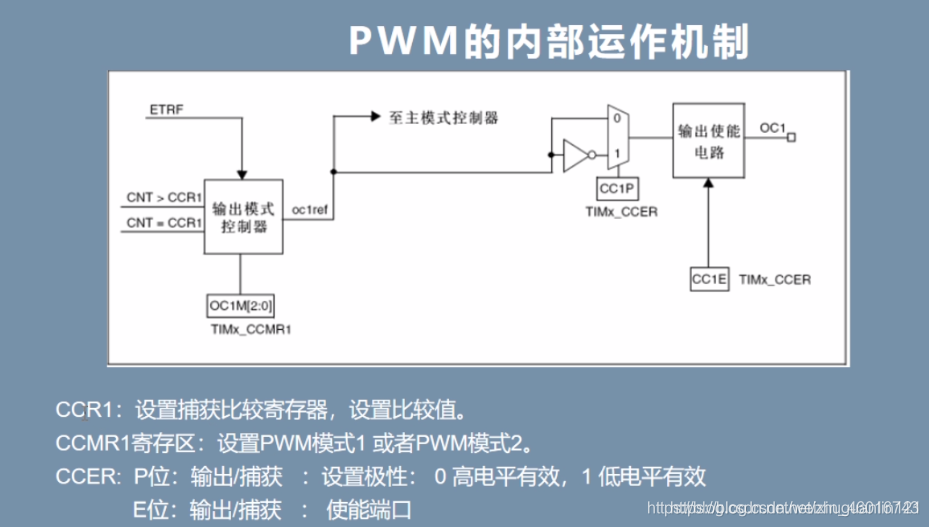
上图PWM模式选择介绍如下:
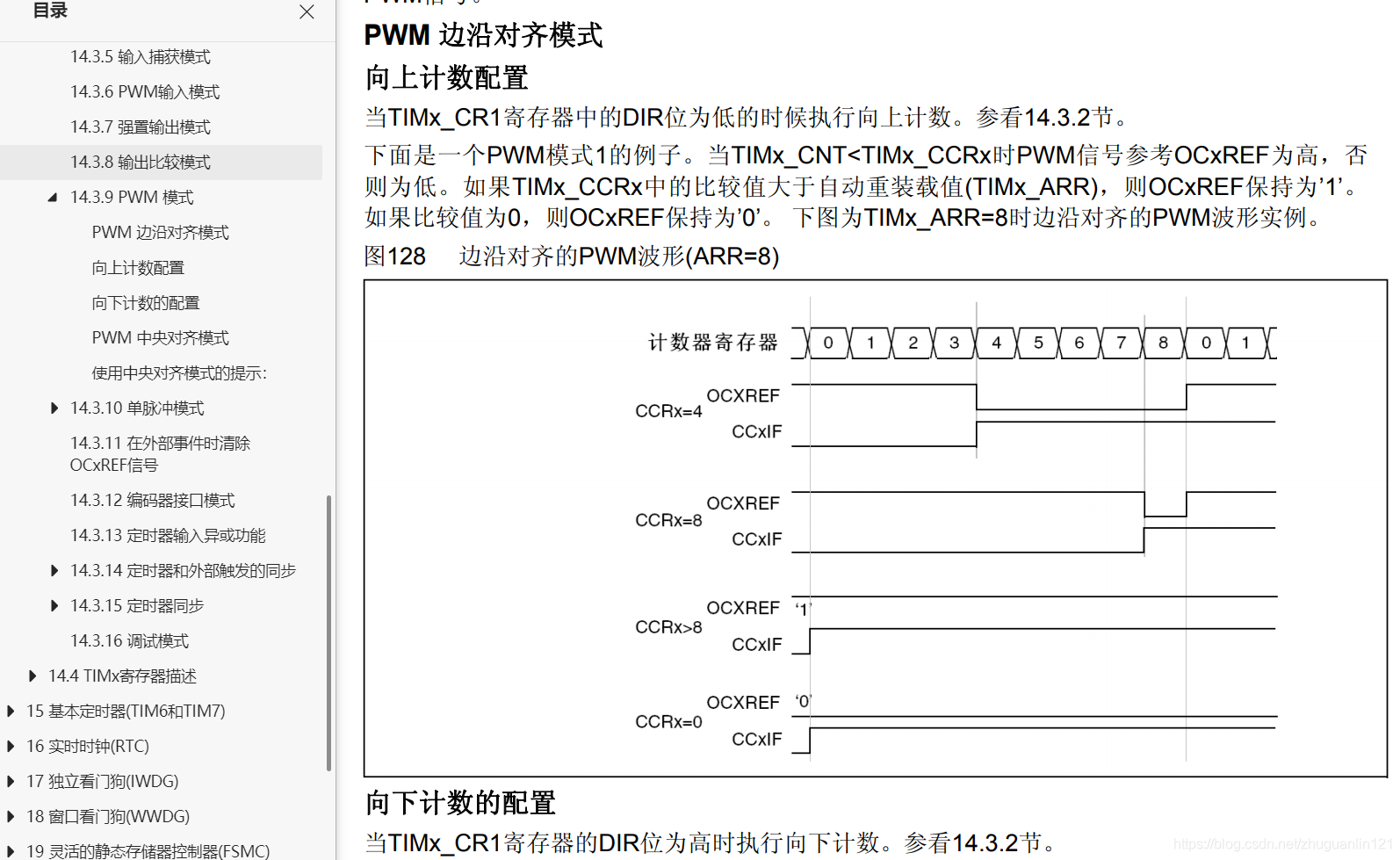
PWM模式一:边沿对齐模式
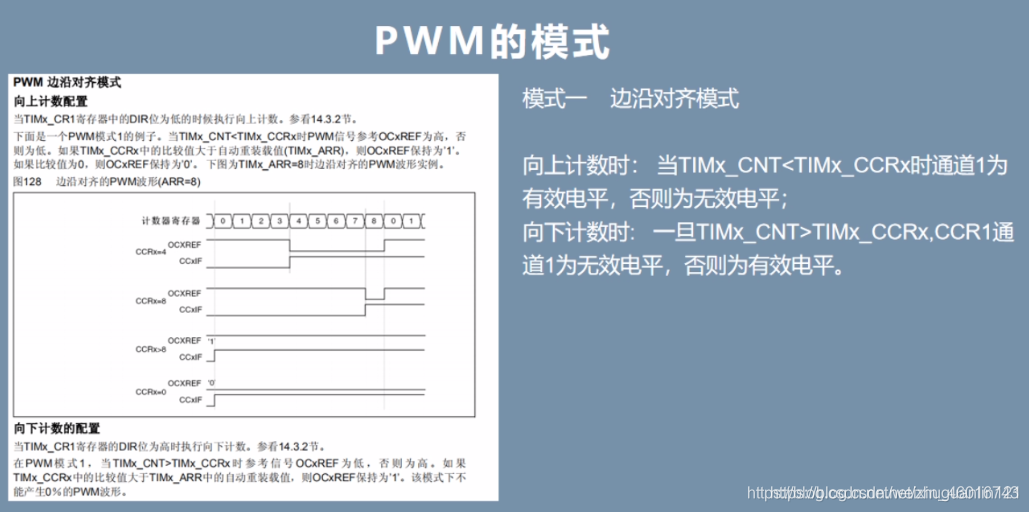
有效电平由上面的P位决定
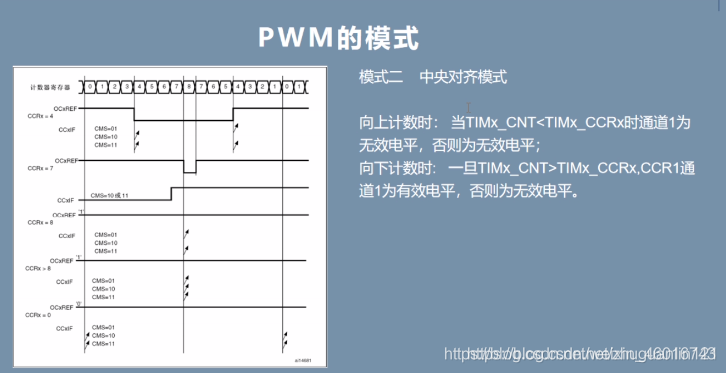
PWM模式二:中央对齐模式
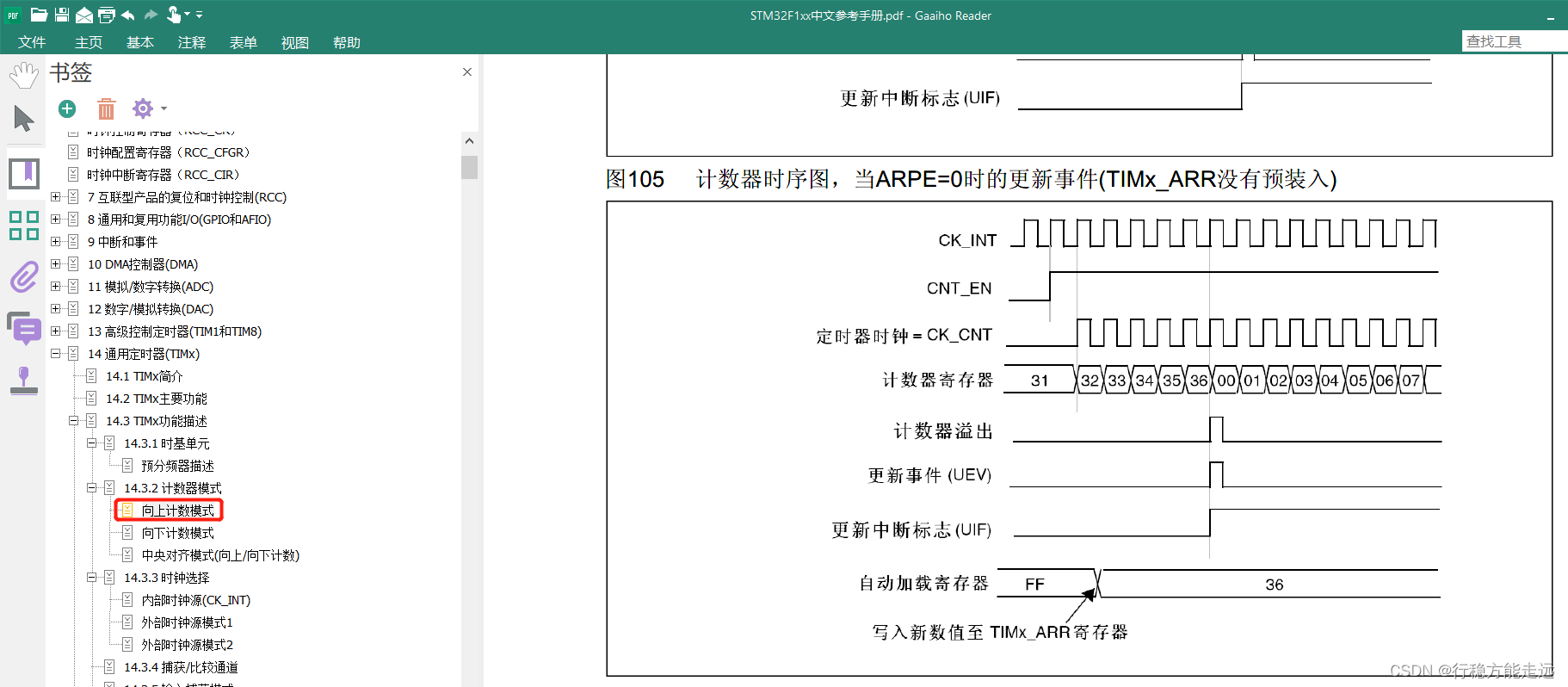
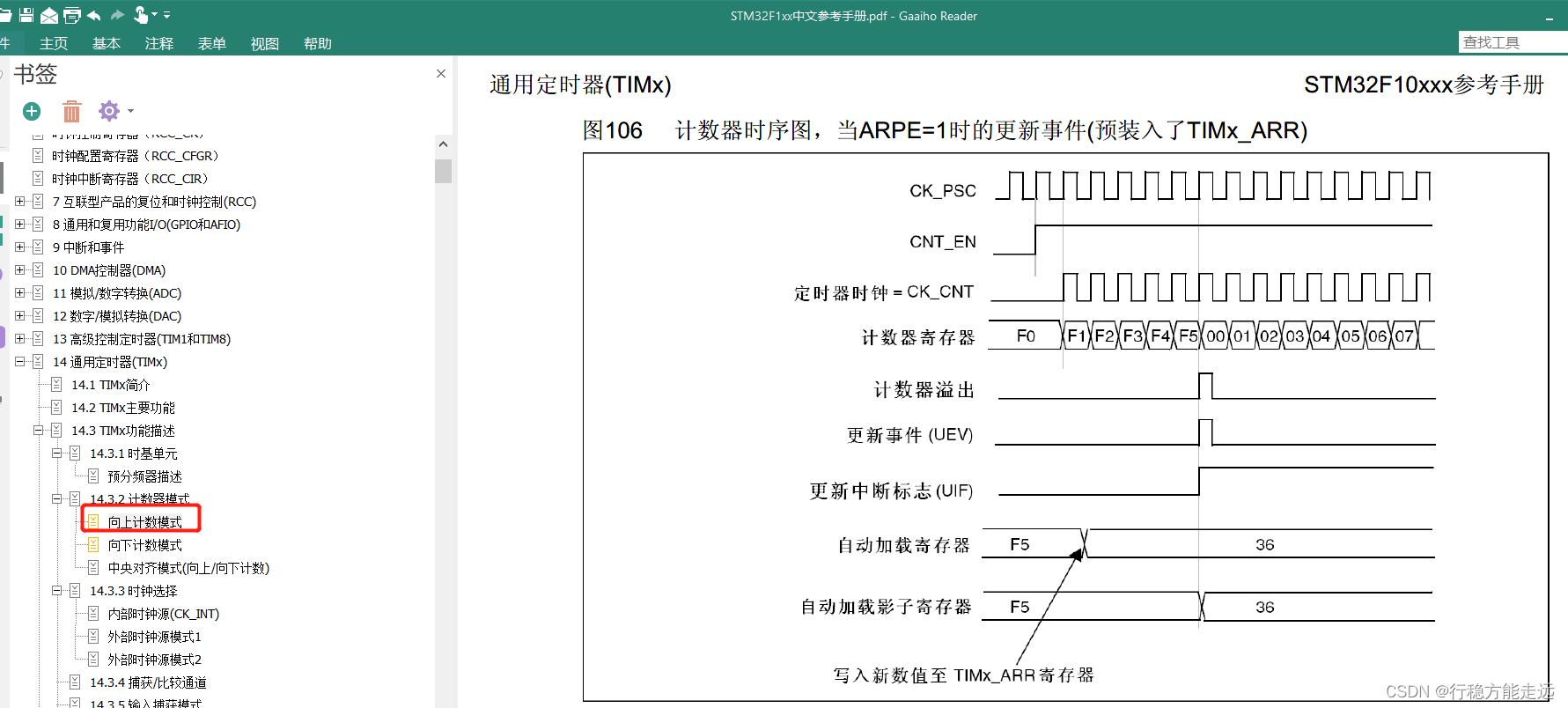
自动加载的预加载寄存器
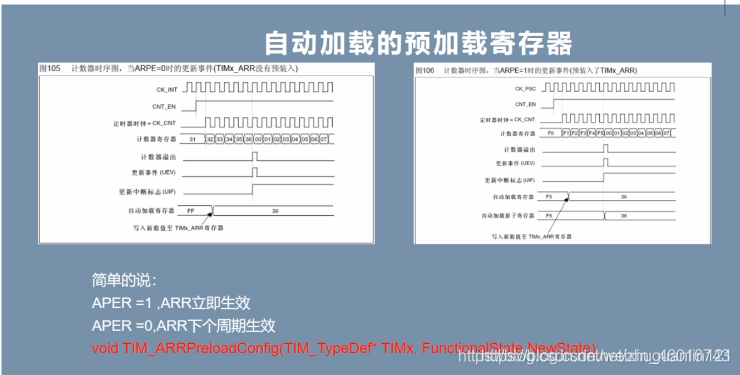
通用定时器输出PWM结构体
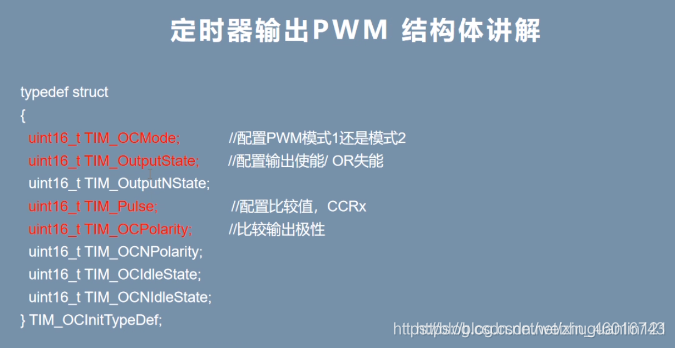
注意:结构体只要配置上面4个红色字体即可
通用定时器输出PWM库函数
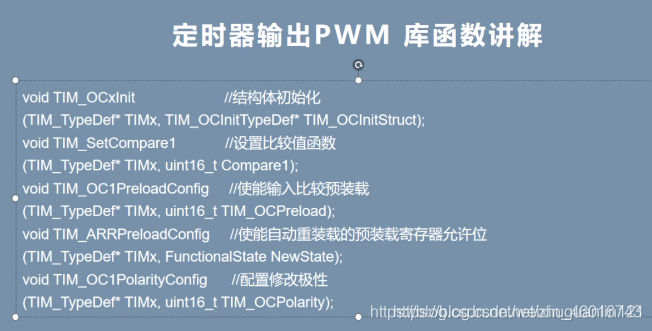
通用定时器输出PWM控制舵机
硬件接线
SG90电机
红线 : 3.3v/ 5v 接到VCC
黑线 : GND
黄线 : 信号线(PWM输出端口) 接到PB5

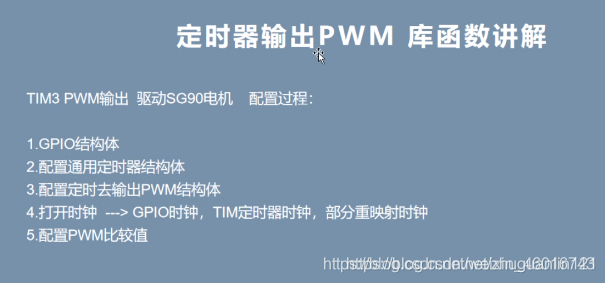
配置步骤:需要配置3个结构体
编程实现
motor.h
#include "stm32f10x.h" //固件库
void motor_config(void);
motor.c
#include "stm32f10x.h" //固件库
#include "motor.h"
void motor_config(void)
{
GPIO_InitTypeDef GPIO_MotorInit; //1.GPIO结构体
TIM_TimeBaseInitTypeDef TIM_MotorInit; //2.通用定时器结构体
TIM_OCInitTypeDef TIMPWN_MotorInit; //3.配置定时去输出PWM结构体
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); //4.1 打开GPIO时钟
RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3, ENABLE); //4.2 打开定时器3时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_AFIO, ENABLE); //复用使能时钟(我们用到部分重映射)
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3 , ENABLE ); //4.3 部分重映射时钟 TIM3 上面图有讲
GPIO_MotorInit.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出(PB5部分重映射 参照上面图)
GPIO_MotorInit.GPIO_Pin = GPIO_Pin_5;//PB5引脚 连接到舵机的信号线
GPIO_MotorInit.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_MotorInit );
TIM_MotorInit.TIM_ClockDivision = TIM_CKD_DIV1;//设置时钟分频为1 不分频
TIM_MotorInit.TIM_CounterMode = TIM_CounterMode_Up;//计数模式 TIM向上计数模式
TIM_MotorInit.TIM_Period = 200 - 1 ; //重装载值 设置在下一个更新事件装入活动的自动重装载值 200/10000s
TIM_MotorInit.TIM_Prescaler = 7200 - 1 ; //预分频 TIMx时钟频率预分频值
TIM_TimeBaseInit( TIM3, &TIM_MotorInit);//定时器3
TIMPWN_MotorInit.TIM_OCIdleState = TIM_OCMode_PWM1; //选择PWM模式1 即当前CNT值比CCR比较值小为有效电平
TIMPWN_MotorInit.TIM_OutputState = TIM_OutputState_Enable; //配置输出使能
TIMPWN_MotorInit.TIM_OCPolarity = TIM_OCPolarity_Low; //比较输出极性 选低电平 即低电平为有效电平 好像是前面讲的P位
//还有一个结构体成员 配置比较值CCRX 后面用固件库函数实现
TIM_OC2Init( TIM3, &TIMPWN_MotorInit ); //定时器3的通道2 所以用OC2
TIM_OC2PreloadConfig( TIM3, TIM_OCPreload_Enable); //自动加载的预加载寄存器 使能 前面讲到
TIM_Cmd( TIM3, ENABLE);
}
main.c
#include "stm32f10x.h" // Device header
#include "usart.h"
#include "led.h"
#include "tim.h"
#include "motor.h"//记得添加路径
void delay(uint16_t time)
{
uint16_t i = 0;
while(time--)
{
i=12000;
while(i--);
}
}
int main(void)
{
uint16_t pwmval = 155; //比较值155 自动重装载值为200 大约3/4
motor_config();
while(1)
{ //舵机在155和195之间 一直循环
for(pwmval = 195;pwmval >= 175;pwmval-=5)
{
//5. 设置PWM比较值函数 即占空比
TIM_SetCompare2( TIM3, pwmval); //定时器3 通道2
delay(500);//延时0.5s
}
}
}


















 427
427

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











