






用于陆地-空中两栖无人机的自动和自适应导航
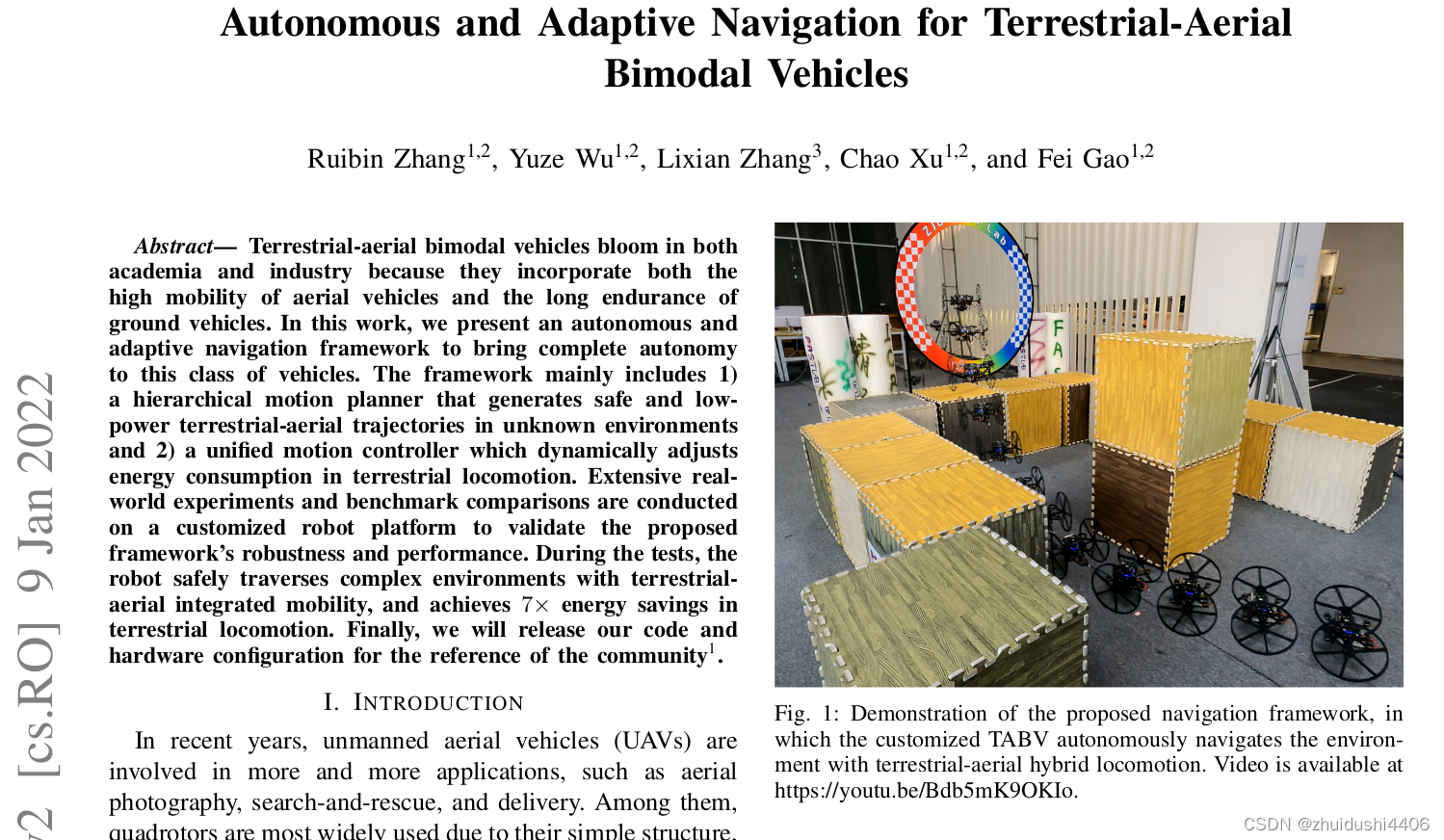
摘要:陆空两栖无人机在学术界和工业界快速发展因为它们拥有空中无人机的高机动性和地面车辆的长续航。在本文中,我们呈现一个自动和自适应的导航框架来带给这种无人机一个完整的自动化。这个框架主要包括1)一个分层运动规划期可以在未知环境中生成安全低能耗的陆地空中轨迹和2)一个一体的运动控制器可以在地面运动中动态的调整能耗。在一个自制的机器人平台上做了大量的现实世界中的试验和比较,来验证所提出的框架的鲁棒性和性能。在测试中机器人安全的在复杂的环境中进行空中和地面移动,并且在地面运动时实现了7倍的能量节省效率。最终,我们将在社区开源我们的硬件和代码。
1.INTRODUCTION
。。。
在本文中,主要聚焦于TABV的自动化导航,这很少被以前的工作讨论。所提出的导航框架让TABV完全自动化(如图一所示)。我们采用了被动轮结构因为它有同一套动力系统和简单结构的优势。首先,我们开发了一套分层运动规划期来搜索动力学的地面-空中混合路径并通过B-spline优化把它们局限到安全,平滑和动力学可行的轨迹上。规划的结果也是能量高效的,因为在规划中除非无人机必须飞过极端的障碍,否则更倾向于地面轨迹。然后,我们设计了一个统一的陆地-空中控制器,包含了一个自适应推力调整来提高在地面时的能量利用率。结果表示比起空中运动节省了七倍的能耗。此外,我们开发了可以用于陆-空导航场景中的自定位和本地地图混合模块。整体的软件结构展示在图2中,我们还基于Kalantari et al. [12]–[14]制作了一个TABV并把它装备上了足够的感知和计算资源并保证便携性和机动性。
我们在复杂的现实世界环境中做了充分的实验来展示所提出导航框架性的性能和鲁棒性。在测试中TABV规划出安全和低能耗的轨迹在非结构性的稠密环境下,并且就算有尖锐的转弯时也能准确的跟踪这些轨迹。我们把我们的工作和当前最新的工作做了比较。结果表明所提出的方法在规划表现,控制精确度,以及能量利用率上更好。本文的贡献包括:
1)一个双层运动规划器可以产生安全,光滑,动力学可行的陆地-空中混合轨迹
2)一个陆地-空中统一控制器,可以在地面运动动态调整推力来提高能量利用
3)结合所提方法和定位和建图模块,开放源代码和定制的飞行平台
II RELATED WORK
A.Motion Planning for TABVs
如前文所述,只有很少的工作研究了TABV的自动导航。据我们所知,只有Fan et al. [8]涉及了陆地-空中运动规划。首先,它使用A*来搜索集合路径作为导航。通过给空中的节点加入一个额外的能量代价,这个方法倾向于搜索地面路径。然后,沿着该引导路径选择一个航路点作为基于基元的本地规划器的目标。它产生一系列最小间隔轨迹,并且基于预定义的代价来评分并选择最好的。但是,这个轨迹搜索方法因为缺乏动力学模型所以太粗糙了。而且,由于本地规划器没有对轨迹做再修正,轨迹的光滑和动力学可行无法被保证。另外,他不考虑地面的非对称约束。在所提出的规划方法中,我们使用动力学路径搜索,并提出一个非线性优化问题来细化动力学路径。
除了光滑性、防撞性和动力学可行性成本外,我们还在优化公式中添加了陆地轨迹的曲率极限成本,以处理非完整约束。
B.Motion Control fir TABVs
一些工作[4,5,8,10]提供了被动轮TABV的控制系统。Fan et al. [8] and Colmenares
et al. [5]提出了相似与普通四旋翼的串级控制结构。都是设置推力为低于无人机重力的固定值,所以PU不能被动态改善。事实上,总推力可以被灵活调整因为地面支持力分担了重量的一部分。Takahashi et al. [4]提出了基于LQR的控制器,带有在线参数估计。但是,没有现实轨迹跟踪实验来验证方法的有效性。Atay et al. [10]拓展了[4,12]的工作通过带入具体的动力学模型并开发一个基于模型的控制系统。另外,提出了一个推力优化方法。但是,这个工作吧俯仰角当做控制器的平滑输出,但是没有展示从给定轨迹到平滑输出之间的银蛇,使得这个控制系统无法再轨迹跟踪中实现。本文所提出的控制方法扩展了Fan et al. [8] and Colmenares et al. [5]的工作通过加入推力调节方法。它通过期望控制输入的大小来计算总推力从而提高能量利用。
III. SAFE TERRESTRIAL-AERIAL MOTION PLANNING
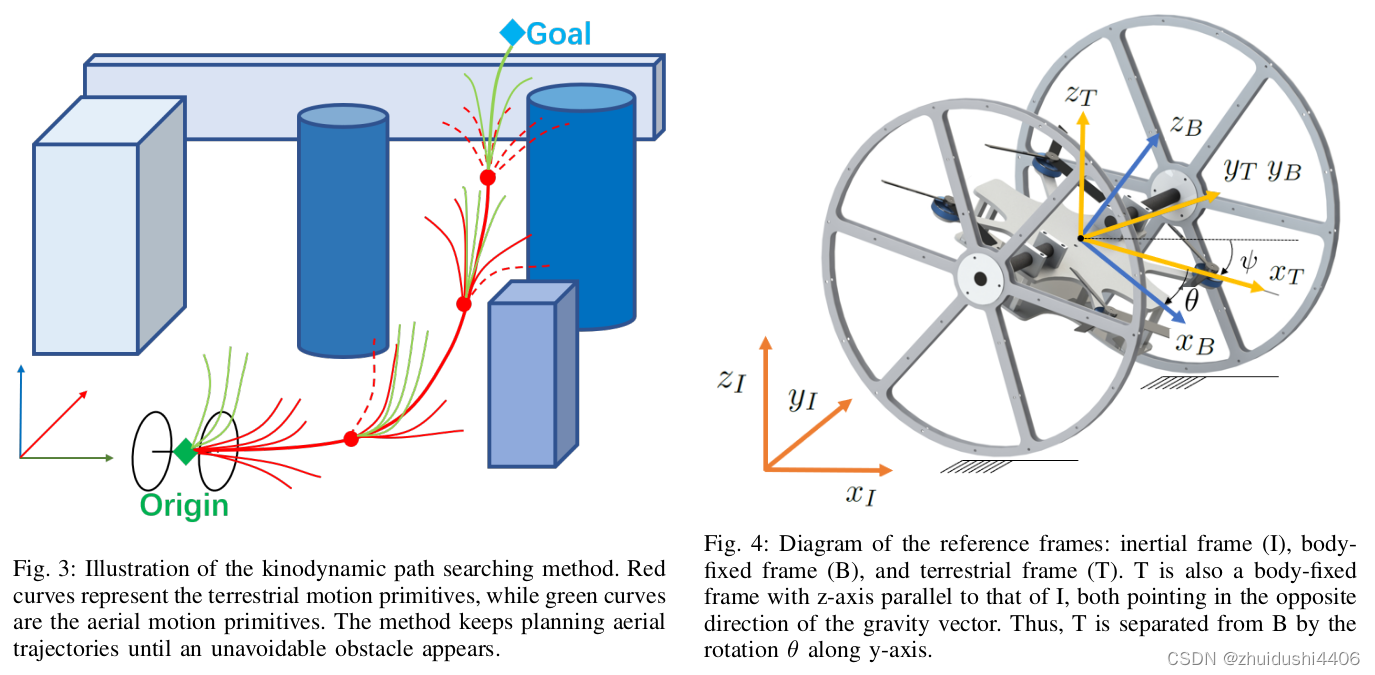
所提出的陆-空运动规划是在Fast-Planner [1]上建立的,后者包含了动力学路径搜索和基于梯度的样条优化器。路径搜索方法基于混合状态A*算法[25],该算法在搜索循环中使用运动基元而不是直线作为图的边缘。本文中在高于地面的运动基元中加入了一个额外的能量损失代价。相应的,路径搜索倾向于规划陆地上的轨迹除非TABV遇到了需要飞跃的巨大障碍,如图3所示。
在轨迹优化中,我们将生成的轨迹重新参数化为具有控制点Q={Q0,Q1,…,QN}的pb度均匀B样条。注意在地面运动中,我们假设TABV在平滑地面运动,所以垂直运动可以被忽略。我么将高于地面的控制点分类为Qa,剩下的是Qt。每个陆地控制点是两维的,i.e., Qti = (xti , yti ), i ∈ [0, M ].为了规整轨迹,我们首先采用以下由Zhou et al[1]提出的代价项,

其中fs是光滑代价,被设计为一个弹性约束方程。fc是碰撞代价基于ESDF梯度信息。fv和fa是动力学可行代价,限制了速度和加速度。λs , λc , λf 是每个代家乡的权重。由于B样条的凸包性质,上述代价项仅出于安全性和动力学可行性的考虑约束控制点Q。更详细的信息可以参考[1]。
在陆地运动中,由于非对称约束,TABV的速度是受限平行于yaw角的。所以,如果轨迹太尖锐,将会在转弯时出现大的跟踪误差。为了解决这个问题,我们在Qt(地面控制点)上实时了一个代价来限制陆地轨迹的弧度。在Qti的弧度被定义成 ,其中
,其中![]() 而且∆Qti =Qt − Qti−1 。所以代价可以被写成
而且∆Qti =Qt − Qti−1 。所以代价可以被写成
其中Fn (Qti )是查分代价函数Cmax给定了弧度的门槛:

梯度的推导可以在[25]中得到。注意Qt可以被中间的空中控制点分割成一些子集,结束点的曲度没有没考虑。总的来说,整体的目标函数被写成以下形式:

优化问题是通过非线性优化器NLopt求解的。
运动规划结束之后,根据当前时间步在生成的轨迹上选取设定点,然后输入给控制器当做惯性系(如图四)中的参考状态。一个空中设定点包括yaw角和3D位置,速度,加速度。![]() 。陆地的包括yaw角和2D位置和速度
。陆地的包括yaw角和2D位置和速度![]() 。为了连续性,空中和地面的偏航叫都设定为平行于速度。如果当前设定点与前一个点的运动模式不同,会发送给控制器一个trigger用来切换运动模式。
。为了连续性,空中和地面的偏航叫都设定为平行于速度。如果当前设定点与前一个点的运动模式不同,会发送给控制器一个trigger用来切换运动模式。
IV. UNIFIED TERRESTRIAL-AERIAL MOTION CONTORL
统一的地-空运动控制

本章解释所提出的控制器,采用了一个串级结构用于地面和空中运动。参考的坐标系如图4定义。所估计的状态来自于板载视觉里程计,表示为![]() ,包括位置,速度,朝向(表示为Z-Y-X欧拉角
,包括位置,速度,朝向(表示为Z-Y-X欧拉角![]() )以及其倒数。至于运动切换,当需要起飞时,控制器立刻切换到空中模式,没有缓慢过度。在降落过程中,控制器命令TABV以一个缓慢的固定速度降落,避免突然撞击引起的VIO漂移。
)以及其倒数。至于运动切换,当需要起飞时,控制器立刻切换到空中模式,没有缓慢过度。在降落过程中,控制器命令TABV以一个缓慢的固定速度降落,避免突然撞击引起的VIO漂移。
A. 空中控制器
空中控制器如图5。从运动规划接收参考状态作为输入。位置控制模块通过比例控制器计算位置和速度误差把它们和参考项Iaa结合来产生一个期望加速度Iada。Iada首先用于产生期望推力|F|,然后和反馈姿态一起用于计算期望姿态。使用四旋翼的微分平坦。姿态计算的详细防尘可以在[26]找到。内环姿态控制和机体角速度控制,分别产生期望姿态微分和期望力矩。这两个模块在板载自动驾驶PX4开源固件上运行。最后,PX4固件由|F|和期望力矩Mb计算每个电机的转速,然后作为输出发送给作动器。
B. 地面控制器
图六展示了陆地控制器,和空中的有相似的结构。姿态控制同样通过半载自动驾驶仪执行。陆地控制器的跟踪表现在图7中展示。
1)航向角控制:
期望的航向角通过当前位置误差计算,定义为![]() 。当位置误差的范数相对较小时,期望航向角被当做参考值,指着轨迹的切线方向。但是,如果位置误差的范数大于一个门槛值,期望航向角会被计算为平行于位置误差
。当位置误差的范数相对较小时,期望航向角被当做参考值,指着轨迹的切线方向。但是,如果位置误差的范数大于一个门槛值,期望航向角会被计算为平行于位置误差![]() 来修正误差。对应的方程如下:
来修正误差。对应的方程如下:
其中||xem||是位置误差门槛。xetx和xety是x轴和y轴的位置分量。
2)自适应推力控制:
期望推力|F|是根据当前期望转向![]() ,来动态控制的。如前文所提到的,由于非对称约束,TABV在转弯时会累积位置误差。为了减小耿总误差,我们动态调整推力,从而它产生一个最大的yaw加速度faimax,达到足够让TABV在短时间deltat内完成转弯,实验中deltat设置为0.1s。由于deltat很小,faimax几乎一直是常数,yaw动力学可以被推导为:
,来动态控制的。如前文所提到的,由于非对称约束,TABV在转弯时会累积位置误差。为了减小耿总误差,我们动态调整推力,从而它产生一个最大的yaw加速度faimax,达到足够让TABV在短时间deltat内完成转弯,实验中deltat设置为0.1s。由于deltat很小,faimax几乎一直是常数,yaw动力学可以被推导为:

由于内环姿态控制器的非线性,我们通过实验拟合来获取推力|F|和最大期望航向加速度faimax,如下式子给出

其中|F|是在0到1之间归一化的值,faimax的单位是rad/s^2.|F|可以有式6和式7解出。另外,|F|确保小于悬停推力。
3)姿态解算
姿态解算计算期望角度![]() 。我们首先计算惯性系下的期望姿态,
。我们首先计算惯性系下的期望姿态,![]() ,并且通过坐标变化获取
,并且通过坐标变化获取![]() 。其中,偏航角在偏航控制器中算出来了,滚转角保持是零 因为假设TABV在平地上运动。下面的方程给出了俯仰角的推导。首先,我们根据位置误差Ixet和速度误差
。其中,偏航角在偏航控制器中算出来了,滚转角保持是零 因为假设TABV在平地上运动。下面的方程给出了俯仰角的推导。首先,我们根据位置误差Ixet和速度误差![]() 计算在地面坐标系上x轴的期望加速度值(表示为Tadtx),通过一个反馈控制律:
计算在地面坐标系上x轴的期望加速度值(表示为Tadtx),通过一个反馈控制律:

其中δ是速度跟踪积分误差,Kv,Kp和Ki是控制增益。然后,俯仰角可以被以下动力学方程计算。在本文中,我们不考虑滚转摩擦这样的外部力。

其中M是TABV的总质量,kf是缩放系数。
V. SYSTEM INTEGRATION
A.Robot Platform
B.Software Architecture
本文所提出的导航框架如图2所示。首先,VIO通过跟踪相机获得,我们把它和板载IMU数据通过卡尔曼滤波融合得到更光滑的UAV状态估计。然后,深度相机得到的深度图以点云投射到世界坐标系。然后采用column-wise evaluation(柱状估计)来提取地面点。维护占用网格图时,不使用这些点,以避免将平坦地面设置为占用的情况。我们还计算并更新一个Euclidean Signed Distance Field (ESDF)(欧几里得符号距离域)通过[1]中提到的高效的算法。然后,本地规划器使用融合后的VIO和占用图搜索一个动力学路径。得到的路径然后使用ESDF获得的梯度信息进行优化。最后控制器跟踪期望的陆地和空中轨迹。实验在第五章第二节中,验证了所提出导航框架的事实性能。
VI. RESULTS
A. Benchmark Comparisons
1) Comparison of Terrestrial-Aerial Planning:
our method performs better in both time efficiency and planning performance.
2) Comparison of Terrestrial Controller:
With the adaptive thrust control, the proposed controller generates a larger thrust to make the TABV pass through sharp turnings faster, thereby reducing the tracking error.
B. Experiments
1) Walking out of a Complex Maze:
2) Flying vs Rolling:
3) Moving through Winding Tunnels:
4) Traversing a large Office:
VII. CONCLUSION















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









