






目录
引入
顾名思义,就是把我们图片的轮廓全部都描边出来
也就是我们在日常生活中面部识别的时候会有一个框,那玩意就是
基本理解
我们还是通过例子来基本的理解以下opencv是如何实现轮廓识别的
这是我们的原图像 test.png


实现代码
cv2.findContours(img,mode,method)
img:轮廓检索模式:
- 传入的图像
mode:轮廓检索模式:
- RETR_EXTERNAL :只检索最外面的轮廓;
- RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
- RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
- RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;(一般只用这种)
method:轮廓逼近方法
- CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,输出完整的轮廓(一般用这种)
- CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。(即只保留轮廓点)
返回的值:
层数(可以不用管)
cv2.drawContours(图像,轮廓,轮廓索引,颜色模式,线条厚度)
注意:会影响我们传入的原图像,记得定义一个临时图像传入进去
import cv2
img = cv2.imread("test.png")
img = cv2.resize(img,(500,400))
# 转换为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 阈值处理,让图像颜色只有2种颜色 提高准确性
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 进行轮廓处理
# cv2.findContours返回两个值
# contours 轮廓点(是个列表)
# hierarchy 层数(用不到)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
# 轮廓描边后会影响原图,所以我们定义一个临时的图片
temp_img = img.copy()
# 进行轮廓描边
# contours 获取到的轮廓点
# -1 表示的画出所有的轮廓,eg:0就表示我们列表中第一个轮廓
# (0, 0, 255) 表示我们用红色线条来绘画 bgr
# 2 表示线条粗细
res = cv2.drawContours(temp_img, contours, -1, (0, 0, 255), 2)
cv2.imshow("res",res)
cv2.waitKey()
cv2.destroyAllWindows()结果:

加深理解
除了最基本的用法,我们还有很多扩充的用法
①比如我们可以获取我们的第一个轮廓,只展示第一个轮廓
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
# 取出列表中第一个
con = contours[0]
# 绘制
res = cv2.drawContours(temp_img, con, -1, (0, 0, 255), 2)
# 展示
cv2.imshow("res",res)我们可以看到,只出现了我们列表第一个的轮廓
![]()
②我们还可以用一个矩形把我们的轮廓给框出来
原图像:

实现代码:
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
# 返回我们要绘制的矩形特征
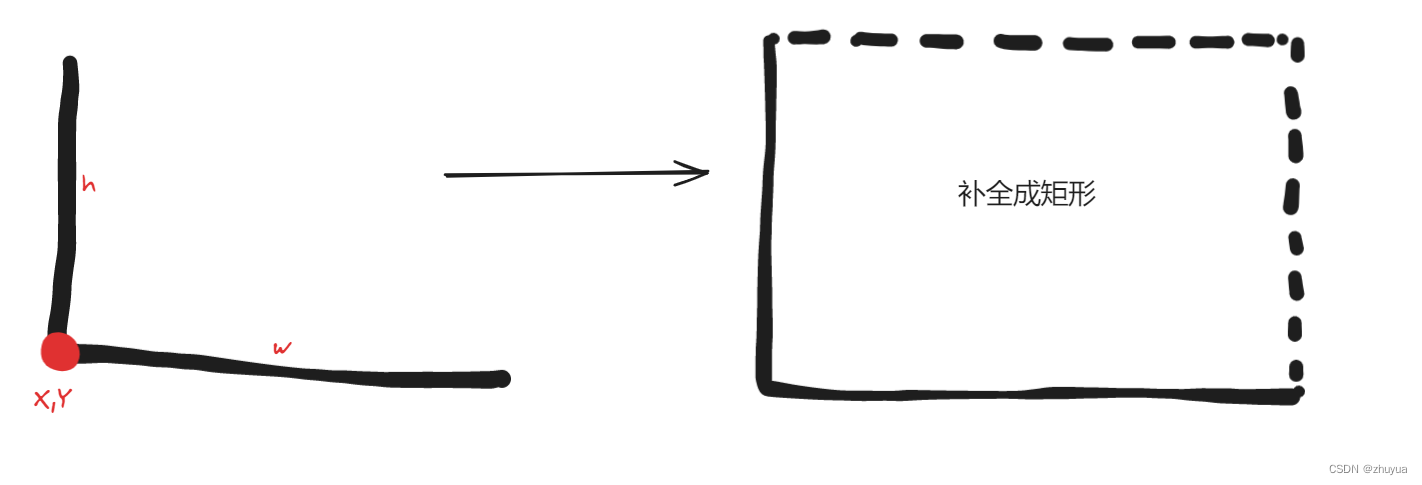
x,y,w,h = cv2.boundingRect(cnt)
# 绘制矩形
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
cv_show(img,'img')x,y,w,h = cv2.boundingRect(cnt)
返回我们的x和y的坐标 以及宽和高
cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
绘制我们的矩形
(x,y)表示我们的开始坐标
(x+w,y+h)表示我们的边
最后会自动把对边连接起来形成一个矩形
结果:

③计算轮廓的周长和面积
这个很简单,就是调用两个函数就能实现对应得功能
cnt = contours[0]
#面积
cv2.contourArea(cnt)
#周长,True表示闭合的
cv2.arcLength(cnt,True)














 779
779











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











