







SUSAN(Smallest Univalue Segment Assimilating Nucleus 最小核值相似区)算子不再沿用Harris算法的微分思想,通过统计圆形模板内符合要求的像素数目(本质是一个积分过程)检测角点,计算简便,抗噪声能力强,具有旋转和平移不变性。
1.理论
SUSAN使用一个圆形的模板(图1-1),在这个模板内,比较每个点与中心点的相似度
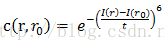
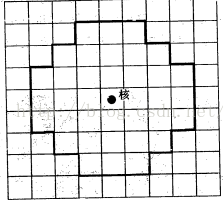
图1-1. SUSAN 半径为3的圆形模板
统计模板内相似像素的个数

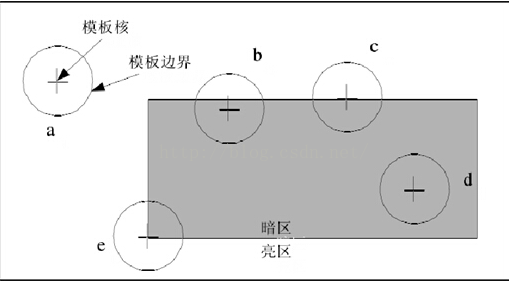
图1-2. USAN在a,d位置取最大值,在角点位置e取最小值
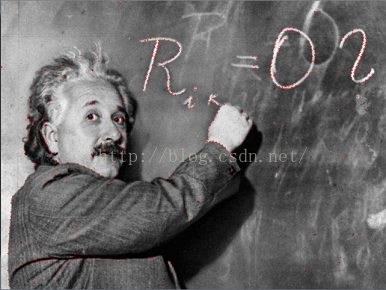
2.代码
typedef struct myPoint
{
int x;
int y;
}_point;
typedef struct mySize
{
int height;
int width;
}_size;
void _cornerSUSAN(unsigned char* srcImg, _size srcSize, _point* corners, int* numCorner, float thresholdT);
void getSUSANkernel(bool* kernel, int radius);
void convolutionSUSAN(unsigned char* srcImg, float* R, _size srcSize, bool* kernel, int kernelSize, float thresholdT);
void depressR(float* srcR, _point* dstR, int* numDst, _size imgSize, _size depressWin);
void main()
{
cv::Mat img = cv::imread("../file/einstein.jpg", 0);
unsigned char* imgBuffer = new unsigned char[img.rows*img.cols];
for(int i=0; i<img.rows; i++)
{
uchar* ptr = img.ptr<uchar>(i);
for(int j=0; j<img.cols; j++)
imgBuffer[i*img.cols+j] = ptr[j];
}
_size srcSize;
srcSize.height = img.rows;
srcSize.width = img.cols;
_point* corners = new _point[srcSize.height*srcSize.width];
int numCorners = 0;
_cornerSUSAN(imgBuffer, srcSize, corners, &numCorners, 40);
cv::Mat colorImg;
cv::cvtColor(img, colorImg, CV_GRAY2BGR);
for(int i=0; i<numCorners; i++)
{
cv::Point pt(corners[i].x, corners[i].y);
cv::circle(colorImg, pt, 1, cv::Scalar(0,0,255));
}
cv::namedWindow("show");
cv::imshow("show", colorImg);
cv::waitKey(0);
}
void _cornerSUSAN(unsigned char* srcImg, _size srcSize, _point* corners, int* numCorner, float thresholdT)
{
int kernelSize = 3;
bool* kernel = new bool[(2*kernelSize+1)*(2*kernelSize+1)];
getSUSANkernel(kernel, kernelSize);
float* R = new float[srcSize.height*srcSize.width];
convolutionSUSAN(srcImg, R, srcSize, kernel, kernelSize, thresholdT);
delete[] kernel;
_size depressSize;
depressSize.height = 3; depressSize.width = 3;
depressR(R, corners, numCorner, srcSize, depressSize);
delete[] R;
}
void getSUSANkernel(bool* kernel, int radius)
{
for(int i=0; i<2*radius+1; i++)
{
for(int j=0; j<2*radius+1; j++)
{
float realRadius = sqrtf((i-radius)*(i-radius)+(j-radius)*(j-radius));
int intRadius = int(realRadius+0.5);
if(intRadius<=radius)
kernel[i*(2*radius+1)+j] = true;
else
kernel[i*(2*radius+1)+j] = false;
}
}
}
void convolutionSUSAN(unsigned char* srcImg, float* R, _size srcSize, bool* kernel, int kernelSize, float thresholdT)
{
for(int i=0; i<srcSize.height; i++)
{
for(int j=0; j<srcSize.width; j++)
{
float sumValue = 0;
int count = 0;
for(int m=-kernelSize; m<=kernelSize; m++)
{
for(int n=-kernelSize; n<=kernelSize; n++)
{
int indexX = j+n;
int indexY = i+m;
if(indexX>=0 && indexX<srcSize.width && indexY>=0 && indexY<srcSize.height)
{
if(kernel[(m+kernelSize)*(2*kernelSize+1)+(n+kernelSize)])
{
int mValue = int(srcImg[i*srcSize.width+j]) - int(srcImg[indexY*srcSize.width+indexX]);
float fValue = -1*pow(mValue/thresholdT, 6);
float eValue = exp(fValue);
sumValue += eValue;
count++;
}
}
}
}
R[i*srcSize.width+j] = sumValue<(0.5*(count-1))?(0.5*(count-1)-sumValue):0;
}
}
}
void depressR(float* srcR, _point* dstR, int* numDst, _size imgSize, _size depressWin)
{
*numDst = 0;
for(int i=0; i<imgSize.height; i++)
{
for(int j=0; j<imgSize.width; j++)
{
float flagValue = srcR[i*imgSize.width+j];
int numPoint = 0, numPass = 0;
for(int m=i-depressWin.height; m<=i+depressWin.height; m++)
{
for(int n=j-depressWin.width; n<=j+depressWin.width; n++)
{
if(m>=0 && m<imgSize.height && n>=0 && n<imgSize.width)
{
float compareValue = srcR[m*imgSize.width+n];
if(flagValue > compareValue)
numPass ++;
numPoint ++;
}
}
}
if(numPoint == numPass+1)
{
_point corner;
corner.x = j;
corner.y = i;
dstR[(*numDst)++] = corner;
}
}
}
}















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









